ROS (Robot Operating System)는 로봇 응용 프로그램을 위해 많은 운영 체제 기능을 시뮬레이트하는 소프트웨어 프레임워크이다.
1. 워크스페이스 만들기
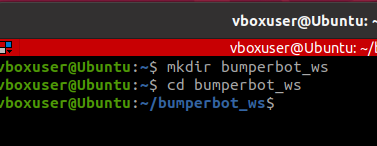
터미널에서 bumperbot_ws 라는 폴더를 만들고 이동해주자.
2. src 폴더 생성
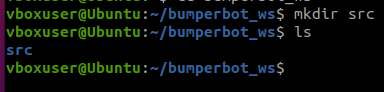
src 라는 폴더를 생성
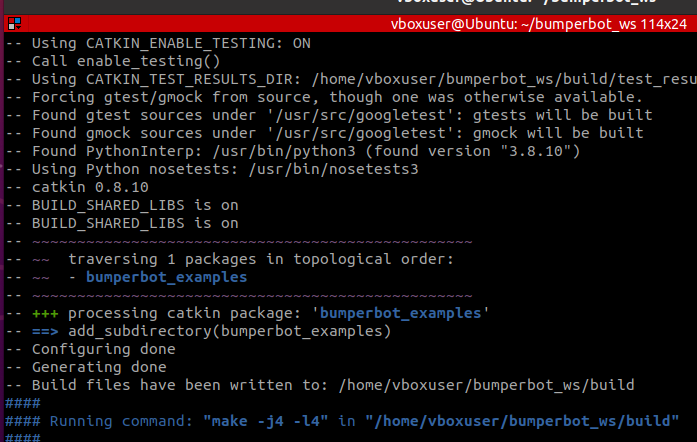
3. 워크스페이스 초기화
ROS 오버레이 - 모든 ROS 패키지와 코스를 따라 개발할 모든 새 패키지에 접근할 수 있다.
catkin_make캣킨은 기본적인 빌드 도구이며 빌드 도구는 소스코드를 변환한다.

실행을 하게 되면 bulid, devel 이라는 폴더 생성
이 두 폴더는 소스 폴더에 있는 코드의 실행과 컴파일을 담당
4. ROS 패키지 생성
catkin_create_pkg bumperbot_examples roscpp rospy std_msgs src 파일로 이동해 위 명령어 실행
사용 방법은
#catkin_create_pkg [패키지 이름] [종속성 라이브러리]roscpp: C++ 스크립트 내에서 ROS 기능을 사용가능
rospy: python 스크립트 내에서 ROS 기능을 사용가능
std_msgs: 정수문자열같은 정의 포함 라이브러리
# 잘못생성했을때
rm -rf [폴더이름]
폴더를 생성 후 들어가면 2개 폴더, 2개 파일 생성
CMakelists.txt 파일은 컴파일러가 어떻게 빌드하고 소스 코드를 실행 가능한 변환해야 하는 명령서 같은 것
package.xml - 라이브러리 종속성 표시
5. WS 다시 구축
buperbot_examples 폴더로 나와서 WS 를 다시 구축해주면
맨 처음과 나왔던 결과와는 다르게 출력된다.
6. WS 활성화
bumperbot 폴더가 ROS 오버레이로 인식 > devel 폴더에 자동으로 생성된 파일을 소싱

source setup.bash

이 명령어를 치면 WS가 활성화 된다.
이 작업을 통해 ROS가 bumperbot_examples 패키지를 알게 됐다 .
7. ROS 패키지 리다이렉션

devel 폴더에서 roscd bumperbot_examples를 실행했을때 해당 폴더로 이동한다면,
이 패키지가 정상적으로 인식되고 있음을 나타낸다.
주의점
터미널을 껏다가 다시 켰을때
roscd bumperbot_examples를 실행하게 되면 찾지 못한다고 나온다.
프로젝트를 실행할때 마다 패키지(bumperbot_examples)가 든 워크스페이스(bumperbot_ws) 에 찾아 가야한다.
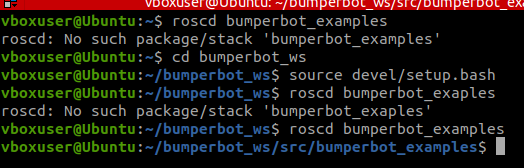
터미널을 다시 실행시켰을 때 보면, roscd 명령어가 동작하지 않는다.