Ubuntu Software에 들어가서 VSCode를 설치
설치를 한 다음 Extension(확장) 에 들어간다.
들어가서 아래 5가지 항목을 다운로드
-
C++
-
python
-
CMake
CMake Tools
-
XML
XML Tools

-
ROS
입력하고 맨 위에 있는 놈들을 다운로드 하면 된다.
VSCode를 사용하는 이유는 당연히 효율적으로 프로그램을 개발하기 위해서 이다.
그러고 터미널을 여러개로 나눠서 개발하기 위해
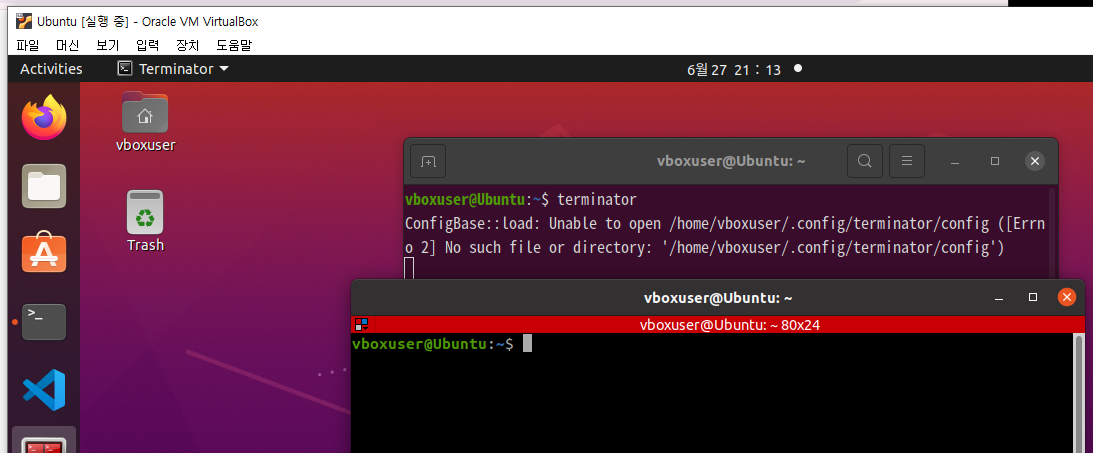
우분투(Ubuntu)에서 터미널 사용시 분할 윈도우 기능이 있는 Terminator라는 걸 설치했다.

ctrl + shift + e, o 가 동작을 안한다.
알고보니 바로 하면 안되고 terminator라는 명령어를 입력하면 된다.
그리고 ROS 사용하기 위한 설치 몇개 진행
# 로봇 제어를 위한 다양한 컨트롤러를 제공
sudo apt-get install ros-noetic-ros-controllers
# Gazebo 시뮬레이터에서 ROS 제어 기능을 사용할 수 있도록 지원
sudo apt-get install ros-noetic-gazebo-ros-control
# ROS 액션 라이브러리 관련 도구들을 설치
sudo apt-get install ros-noetic-actionlib-tools
# GUI를 사용하여 조인트 상태를 퍼블리시할 수 있도록 지원
sudo apt-get install ros-noetic-joint-state-publisher-gui
# 간단한 시뮬레이션 환경을 제공하는 ROS 패키지
sudo apt-get install ros-noetic-turtlesim
# 로봇의 위치 추정 및 로컬라이제이션을 위한 패키지
sudo apt-get install ros-noetic-robot-localization
# 조이스틱 입력을 처리하기 위한 ROS 패키지
sudo apt-get install ros-noetic-joy
# 조이스틱을 사용하여 로봇을 원격으로 조작할 수 있도록 지원
sudo apt-get install ros-noetic-joy-teleop
여기까지 하면 ROS 기본 세팅은 끝났다.
감사합니다. https://www.youtube.com/channel/UCxlkiu9_aWijoD7BannNM7w