This writing is a summary for the paper Focal Loss for Dense Object Detection.
Problem Statement
Video Reference | Paper Reference
- RCNN based methods are accurate in terms of detecting small objects.
- There’s a trade-off between speed and accuracy in detection.
Major issue was Imbalance of data distribution
- In average, there are 7 objects in one coco images
- But there are 100k boxes in one picture, thus most of the boxes are not useful information. Dense Object detection means that there are many many boxes on one picture. This is suspected to lower the accuracy.
Solution & Result
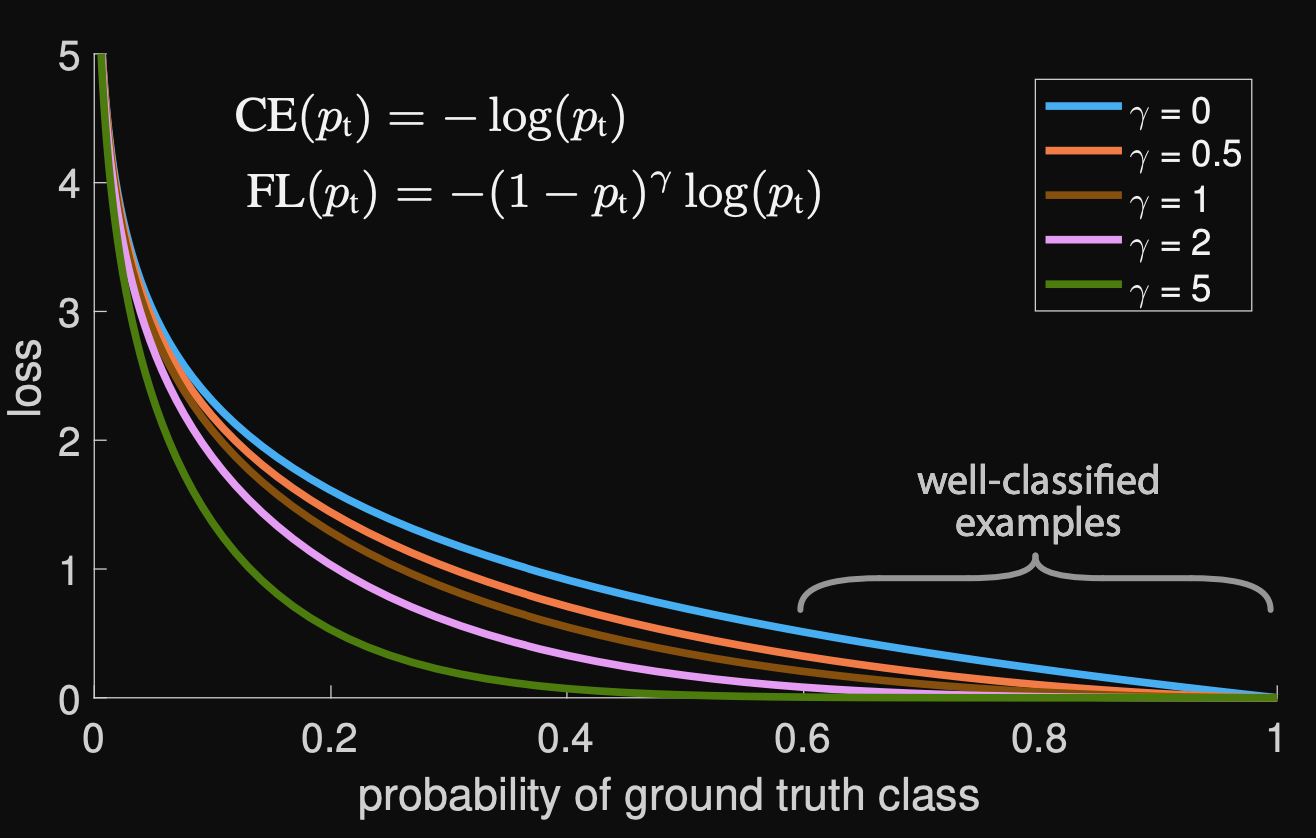
Thus the paper reduced the loss of background(or easy examples) more than former Cross Entropy function by applying gamma constant.
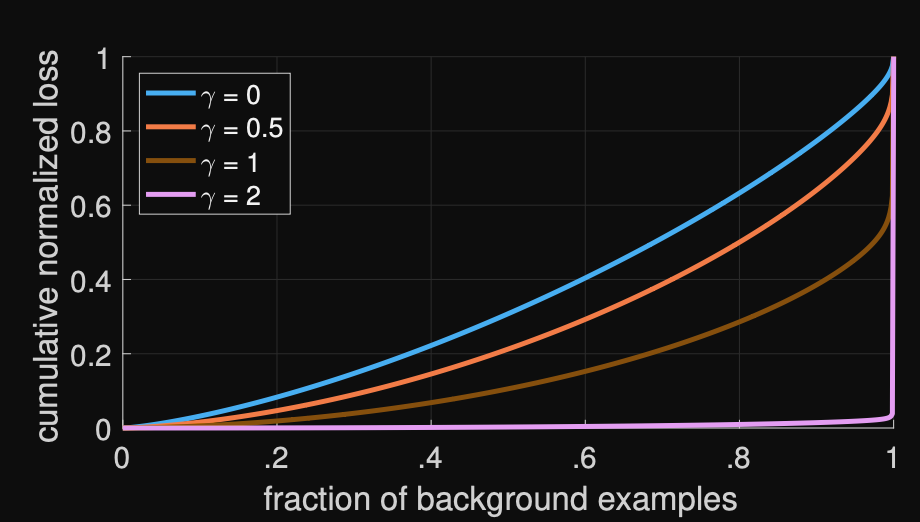
Most of background examples are easy, only generates small losses. Loss gets close to 0 when gamma is larger. The bigger the gamma is, the loss function focuses on hard examples(or foreground boxes).
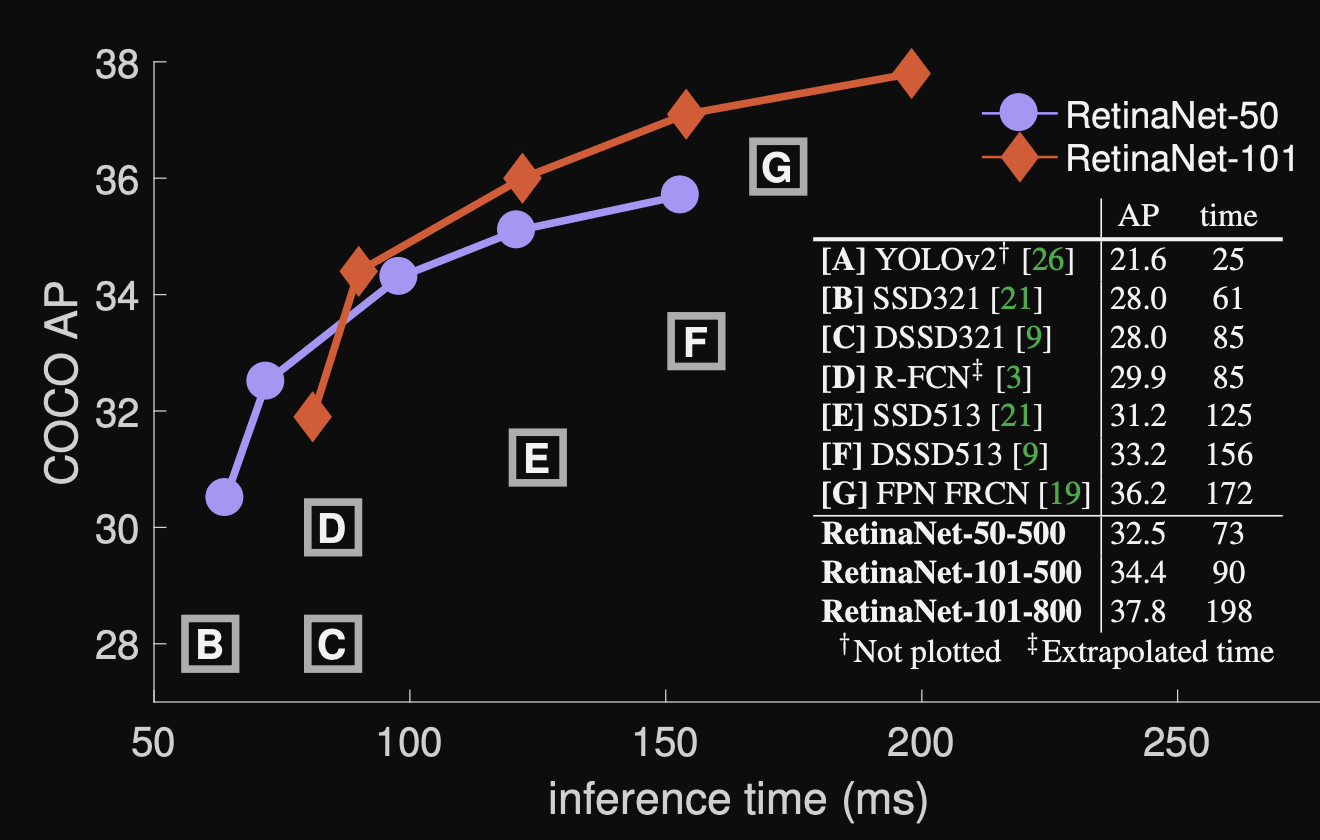
Applying Focal loss performs better than formal alpha-balanced cross entropy on coco dataset. Despite being a one-stage detection model, Retinanet obtains upper curve above R-CNN model.
Detection Model Code Analysis
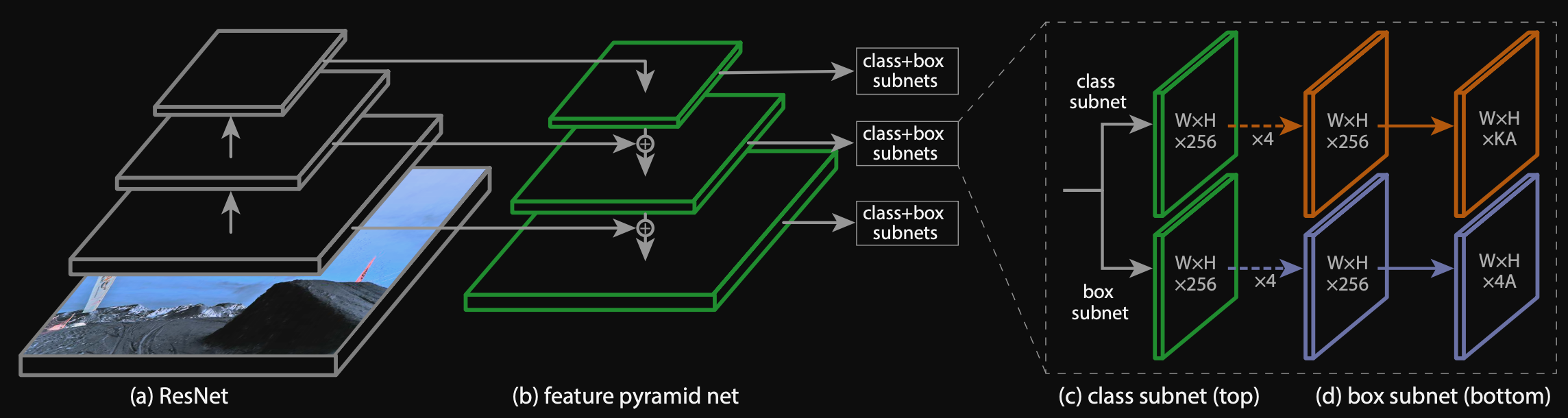
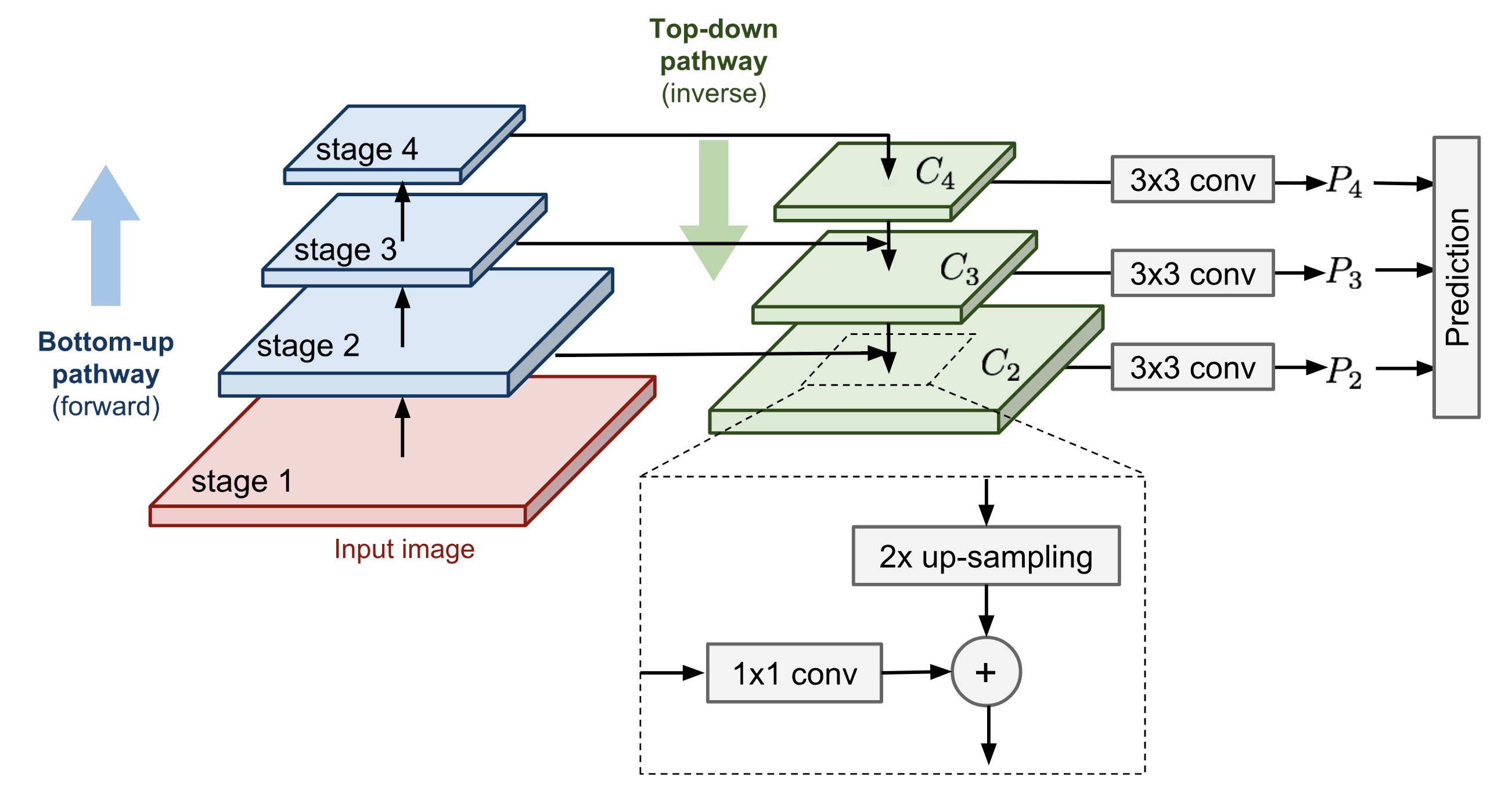
Retinanet is FPN as a feature extractor & Dense box locations(100k boxes) -> using focal loss to train the model.
(a) ResNet
(b) Feature Pyramid Network Backbone
class PyramidFeatures(nn.Module):
"""
Backbone network is responsible for computing a convolutional feature map over an entire input image.
"""
def __init__(self, C3_size, C4_size, C5_size, feature_size=256):
super(PyramidFeatures, self).__init__()
# upsample C5 to get P5 from the FPN paper
self.P5_1 = nn.Conv2d(C5_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P5_upsampled = nn.Upsample(scale_factor=2, mode='nearest')
self.P5_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)
# add P5 elementwise to C4
self.P4_1 = nn.Conv2d(C4_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P4_upsampled = nn.Upsample(scale_factor=2, mode='nearest')
self.P4_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)
# add P4 elementwise to C3
self.P3_1 = nn.Conv2d(C3_size, feature_size, kernel_size=1, stride=1, padding=0)
self.P3_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=1, padding=1)
# "P6 is obtained via a 3x3 stride-2 conv on C5"
self.P6 = nn.Conv2d(C5_size, feature_size, kernel_size=3, stride=2, padding=1)
# "P7 is computed by applying ReLU followed by a 3x3 stride-2 conv on P6"
self.P7_1 = nn.ReLU()
self.P7_2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, stride=2, padding=1)
def forward(self, inputs):
C3, C4, C5 = inputs
P5_x = self.P5_1(C5)
P5_upsampled_x = self.P5_upsampled(P5_x)
P5_x = self.P5_2(P5_x)
P4_x = self.P4_1(C4)
P4_x = P5_upsampled_x + P4_x
P4_upsampled_x = self.P4_upsampled(P4_x)
P4_x = self.P4_2(P4_x)
P3_x = self.P3_1(C3)
P3_x = P3_x + P4_upsampled_x
P3_x = self.P3_2(P3_x)
P6_x = self.P6(C5)
P7_x = self.P7_1(P6_x)
P7_x = self.P7_2(P7_x)
return [P3_x, P4_x, P5_x, P6_x, P7_x](c) Class Subnet (First Subnet)
Convolutional Object classification on the backbone’s output
class ClassificationModel(nn.Module):
def __init__(self, num_features_in, num_anchors=9, num_classes=80, prior=0.01, feature_size=256):
super(ClassificationModel, self).__init__()
self.num_classes = num_classes
self.num_anchors = num_anchors
self.conv1 = nn.Conv2d(num_features_in, feature_size, kernel_size=3, padding=1)
self.act1 = nn.ReLU()
self.conv2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act2 = nn.ReLU()
self.conv3 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act3 = nn.ReLU()
self.conv4 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act4 = nn.ReLU()
self.output = nn.Conv2d(feature_size, num_anchors * num_classes, kernel_size=3, padding=1)
self.output_act = nn.Sigmoid()
def forward(self, x):
out = self.conv1(x)
out = self.act1(out)
out = self.conv2(out)
out = self.act2(out)
out = self.conv3(out)
out = self.act3(out)
out = self.conv4(out)
out = self.act4(out)
out = self.output(out)
out = self.output_act(out)
# out is B x C x W x H, with C = n_classes + n_anchors
out1 = out.permute(0, 2, 3, 1)
batch_size, width, height, channels = out1.shape
out2 = out1.view(batch_size, width, height, self.num_anchors, self.num_classes)
return out2.contiguous().view(x.shape[0], -1, self.num_classes)
(d) Box Regression Subnet (Second Subnet)
Convolutional bounding box regression
class RegressionModel(nn.Module):
def __init__(self, num_features_in, num_anchors=9, feature_size=256):
super(RegressionModel, self).__init__()
self.conv1 = nn.Conv2d(num_features_in, feature_size, kernel_size=3, padding=1)
self.act1 = nn.ReLU()
self.conv2 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act2 = nn.ReLU()
self.conv3 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act3 = nn.ReLU()
self.conv4 = nn.Conv2d(feature_size, feature_size, kernel_size=3, padding=1)
self.act4 = nn.ReLU()
self.output = nn.Conv2d(feature_size, num_anchors * 4, kernel_size=3, padding=1)
def forward(self, x):
out = self.conv1(x)
out = self.act1(out)
out = self.conv2(out)
out = self.act2(out)
out = self.conv3(out)
out = self.act3(out)
out = self.conv4(out)
out = self.act4(out)
out = self.output(out)
# out is B x C x W x H, with C = 4*num_anchors
out = out.permute(0, 2, 3, 1)
return out.contiguous().view(out.shape[0], -1, 4)

I have approximately the same attitude towards the preparation of some written works, essays, dissertations, and so on. Perhaps what every student should know is that you can always turn to college paper writer, for example, EssayShark, to get help with writing any work. Sometimes it’s easier to pay and get quality results.