언리얼 엔진에서는 x, y, z 축 말고도 Roll, Pitch, Yaw라는 용어를 사용한다.
다른 분야에서도 쓰는 용어같은데 그냥 하나로 통일하면 좋았을 것을...
X 축 : Roll
Y 축 : Pitch
Z 축 : Yaw
에 각각 대응한다고 볼 수 있다.
그림으로 보면 이게 가장 이해하기 쉬운 것 같다.
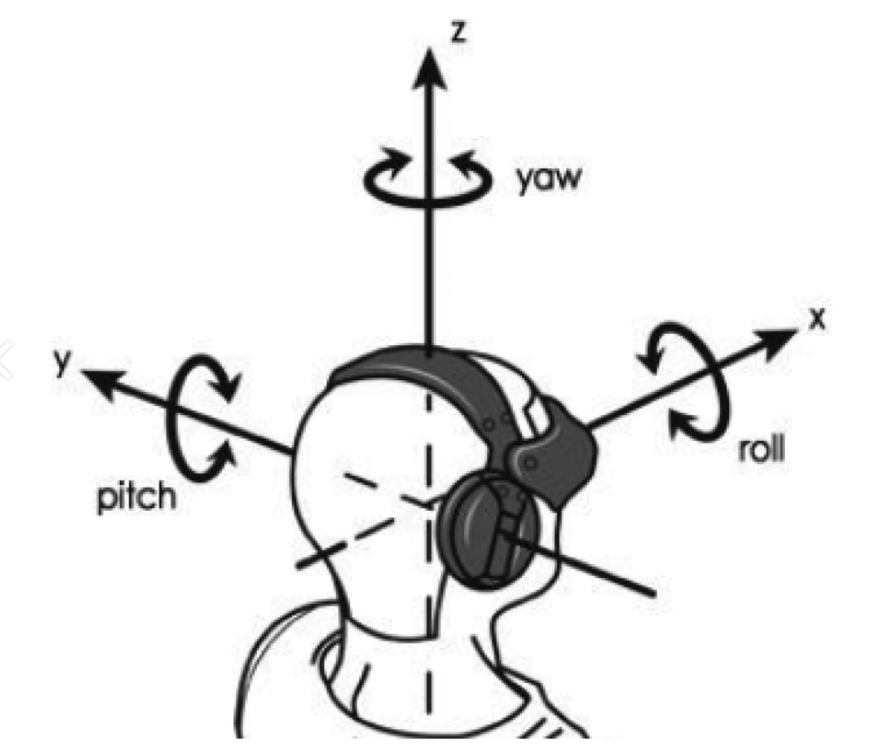
좌우를 돌아보려면 Z축 기준 회전이기에 Yaw,
고개를 위아래로 움직이면 Y축 기준 Pitch,
고개를 갸웃하고 기울이는건 X축 기준 Roll
참고사이트
.
.
.
추가로 여러 3D를 구현할수 있는 프로그램들은 이렇게 축이 설정되어있다고 한다.

통일해... 제발...

직장 구하고 있습니다.