Concurrency
Concurrency vs Parallelism
Concurrency
- Whether processes can access resources (CPU) simultaneously
Parallelism
- Whether actually do multiple tasks at once
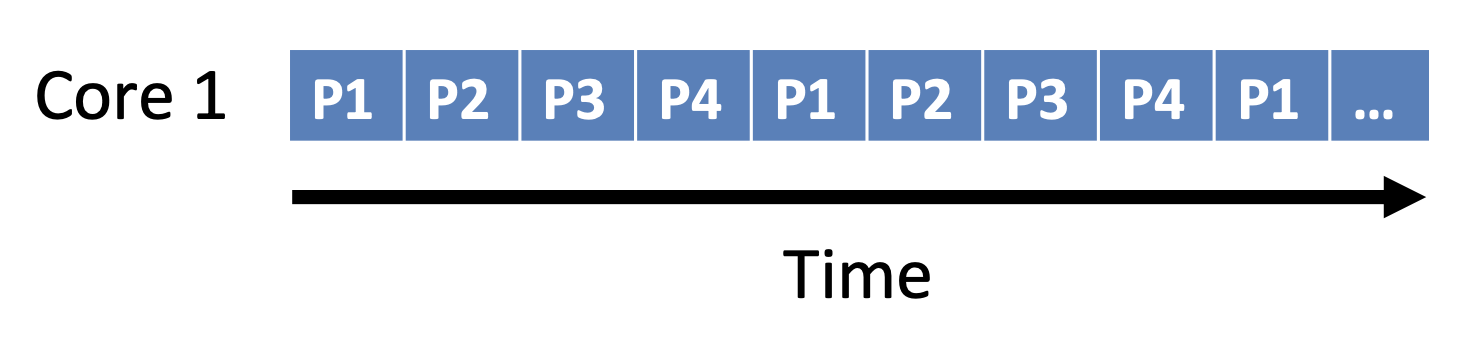
Two types of parallelism
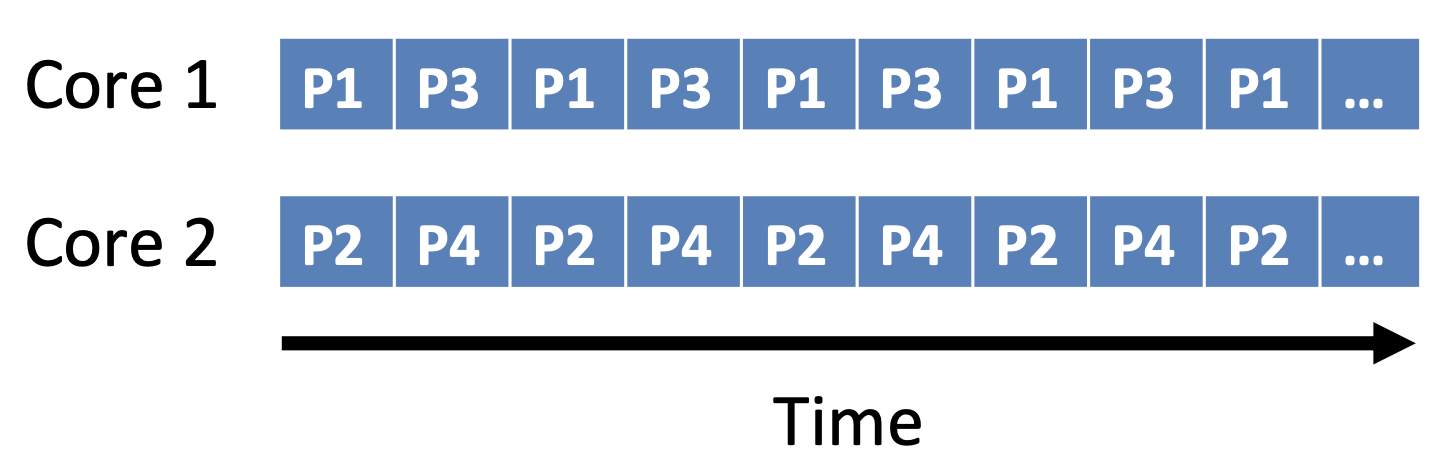
- Data parallelism
- Same task executes on many cores
- Task parallelism
- Different tasks execute on each core
- 1 thread handles game AI
- 1 thread handles physics
- Different tasks execute on each core
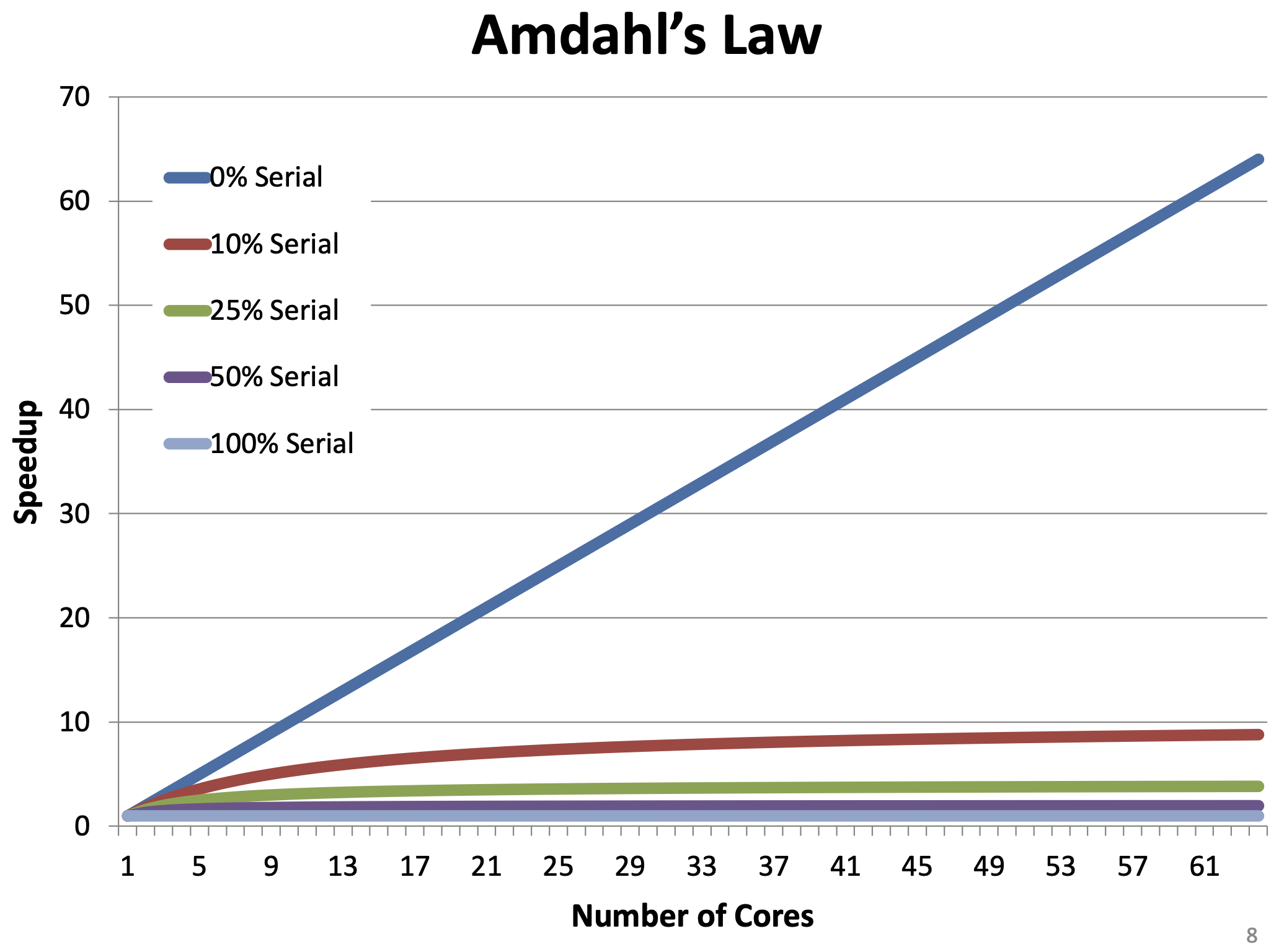
Amdahl's Law
- Upper bound on performance gains from parallelism
- is the fraction of processing time that is serial (non-parallel)
- is the number of CPU cores
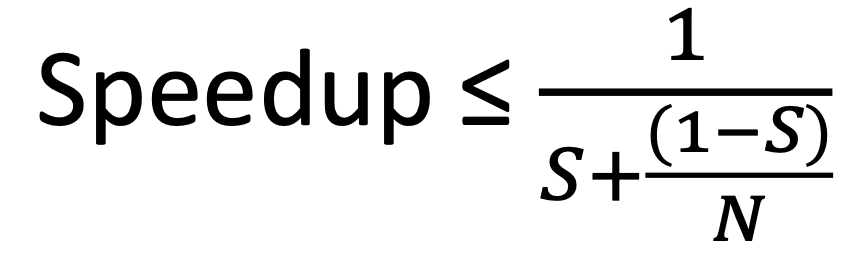
- If , speedup approaches
- Speedup is dependent on serial processing time
Race Condition
Race Condition
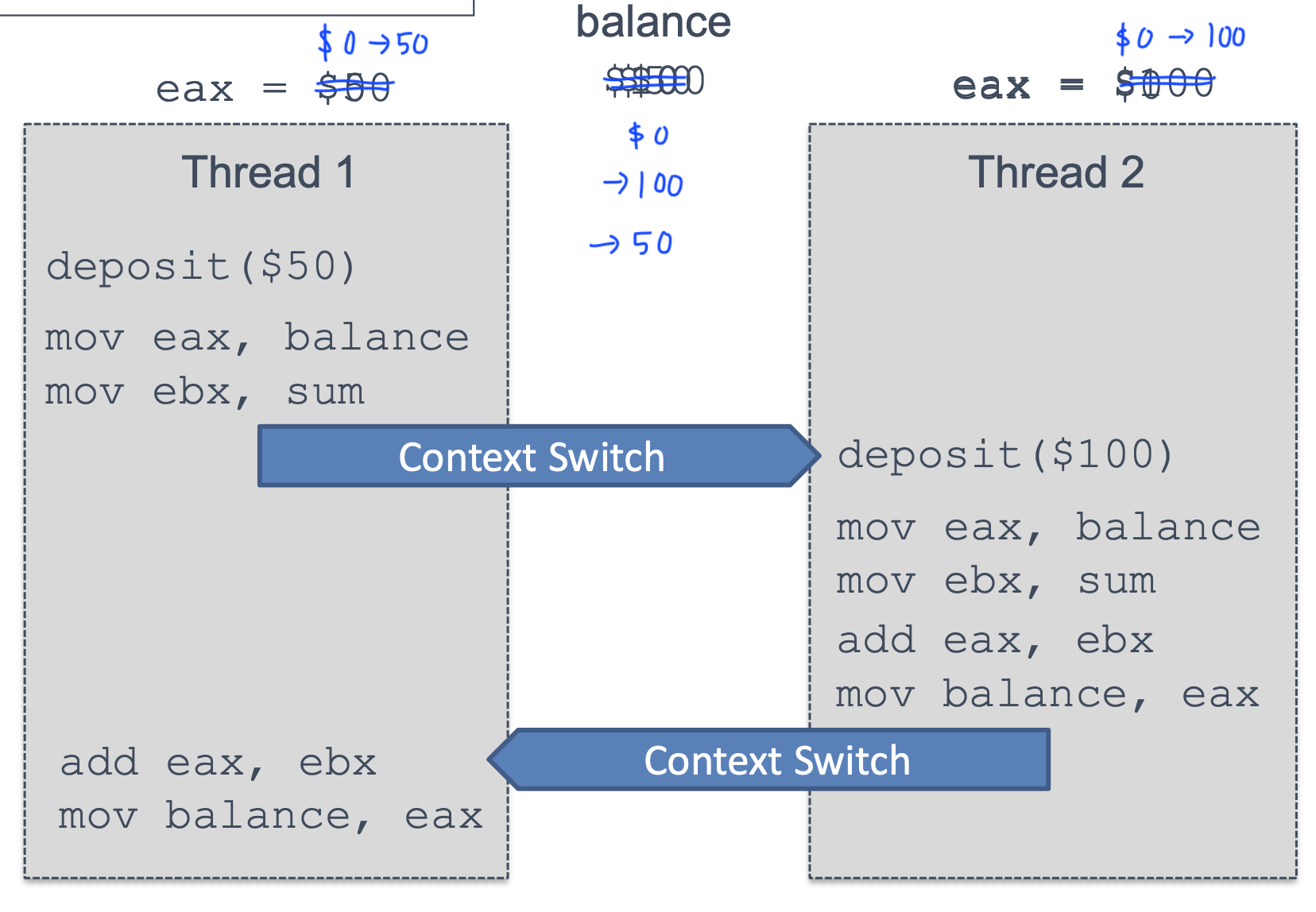
- Multiple threads race to execute code and update shared data
- So, we need to execute sequentially to prevent race condition
Critical Sections
- Code that accesses a shared resource
that must not be concurrently accessed
by more than one thread of execution - Piece of code is not the problem, but the shared resource is the problem
Atomicity
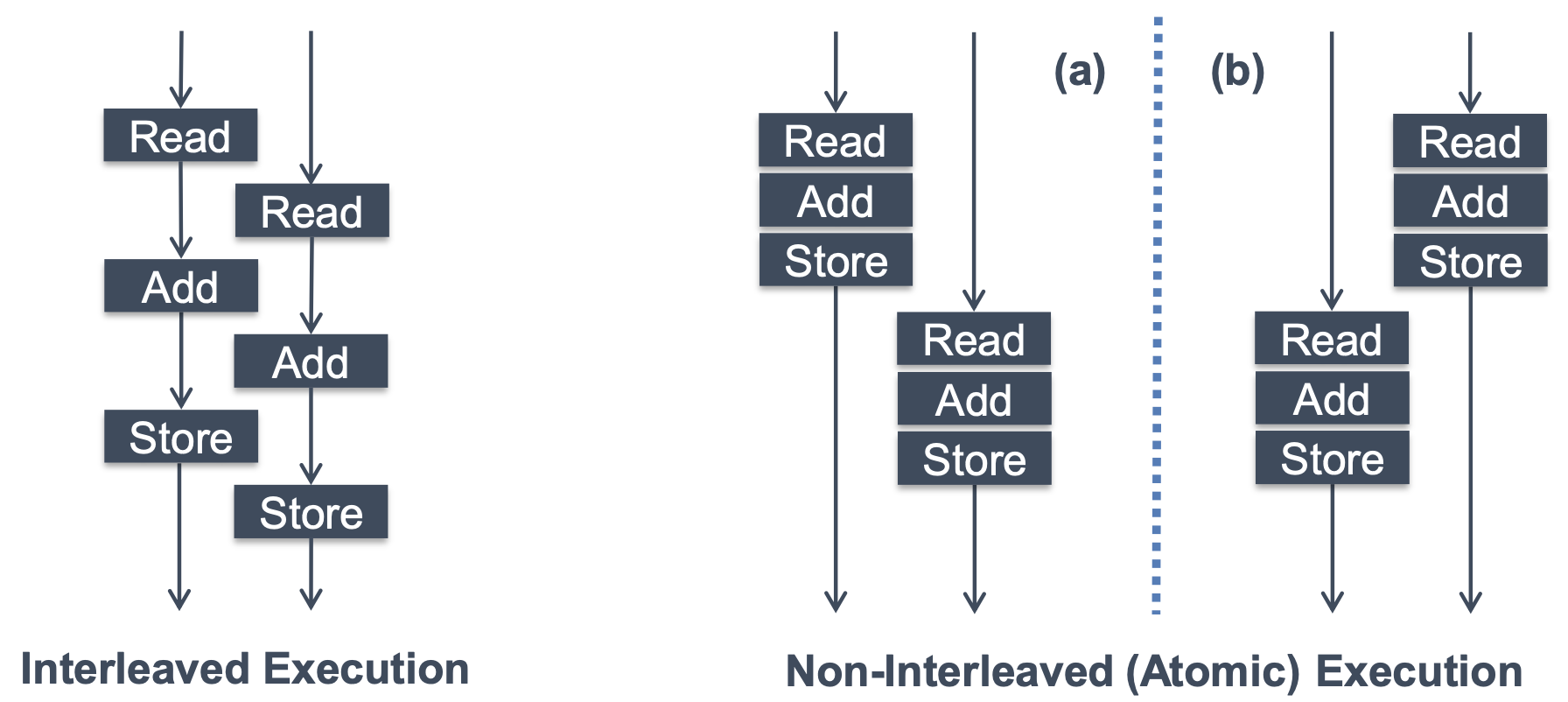
- If we execute code atomically, these errors can be prevented
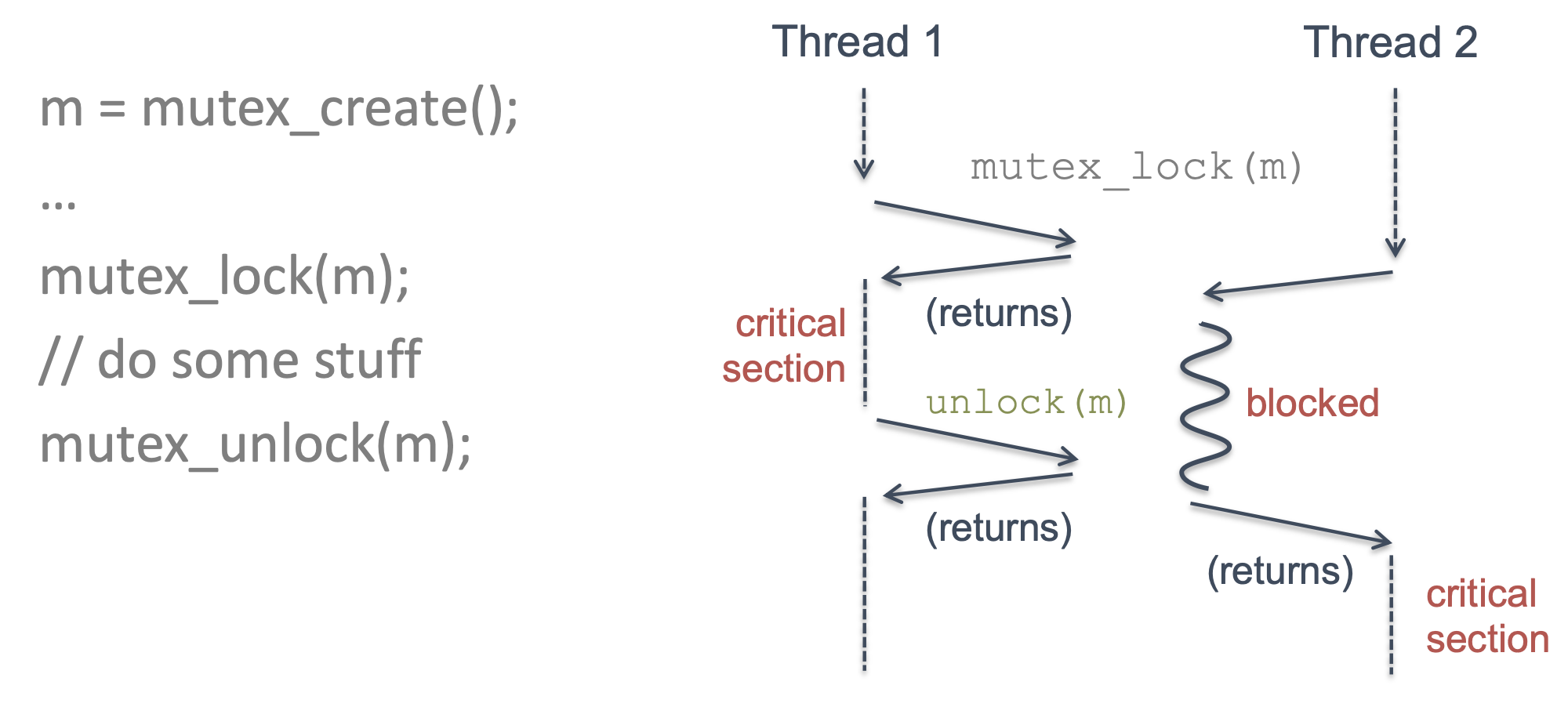
Mutex
- Mutual exclusion lock can enforce atomicity in code
- The section between mutex lock and unlock is critical section
Lock
Lock
- Ensure that critical section executes as if it were a single atmoic instruction
- Access to shared resources must be in the critical section
Semantics
- If no other threads hold the lock, the thread will acquire the lock
- Enter the critical section
- = This thread is the owner of the lock
- Other threads are prevented from entering the critical section
while the first thread that holds the lock is in there
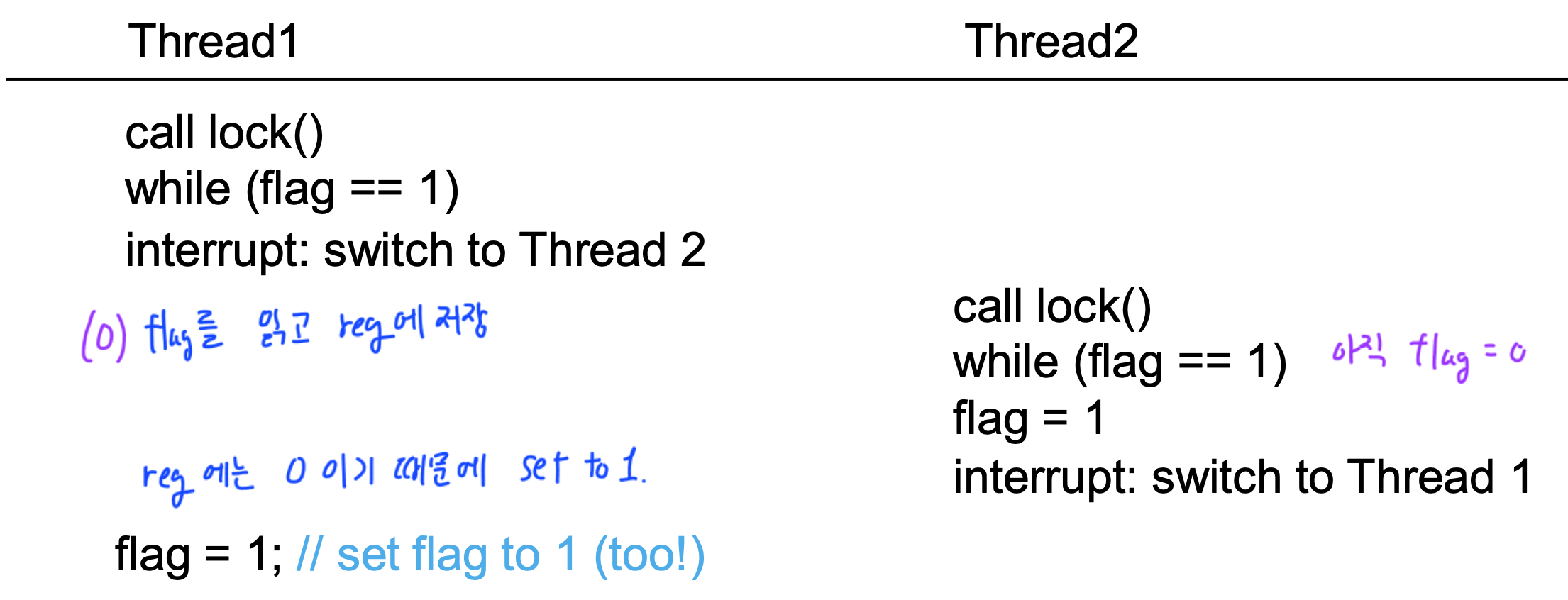
Why needs Hardware support?
- Using a flag denoting whether the lock is held or not
- Flag is shared variable too -> need lock
Problem 1
- No Mutual Exclusion
Problem 2
- Spin-waiting wastes time
So we need an atomic instruction supported by hardware
Mutex
Lock and Unlock operations must be atomic
- Test and Set
- Compare and Swap
- Exchange
Well-behaved Mutex
Should guarantees the properties
- Mutual exclusion
- Only one process may hold the lock
- Progress
- The decision about which process gets the lock next cannot be postponed indefinitely
- Bounded waiting
- If all lockers unlock, no process can wait forever
Mutex on a single-CPU system
- The only preemption mechanism is interrupt
- If interrupts are disabled, the currently executing code is atmoic
On Multi CPU
In a multi-CPU system, Data can be read or written by threads, even if interrupts are disable
Test and Set
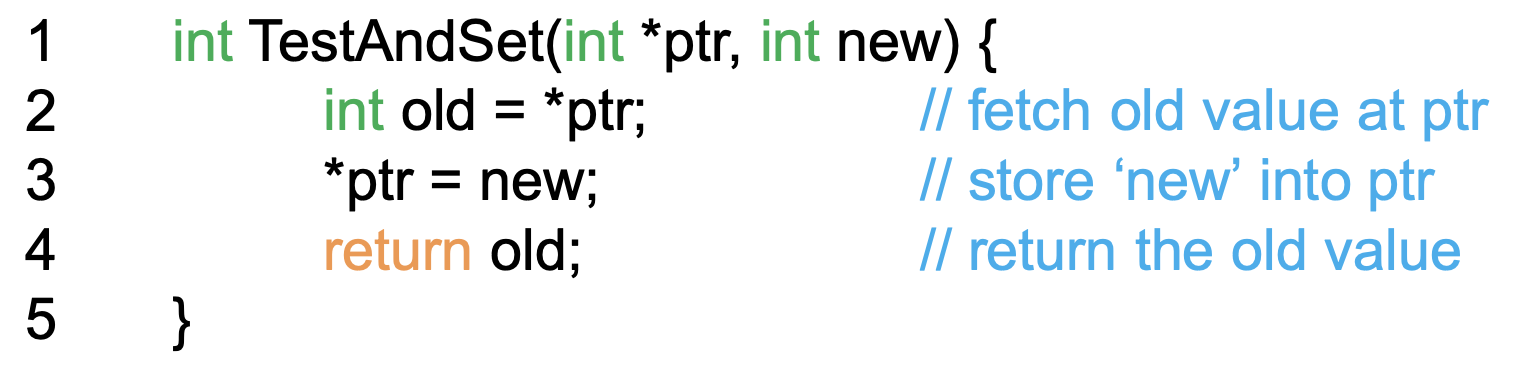
- The operations are performed atomically
Spin Lock using test and set
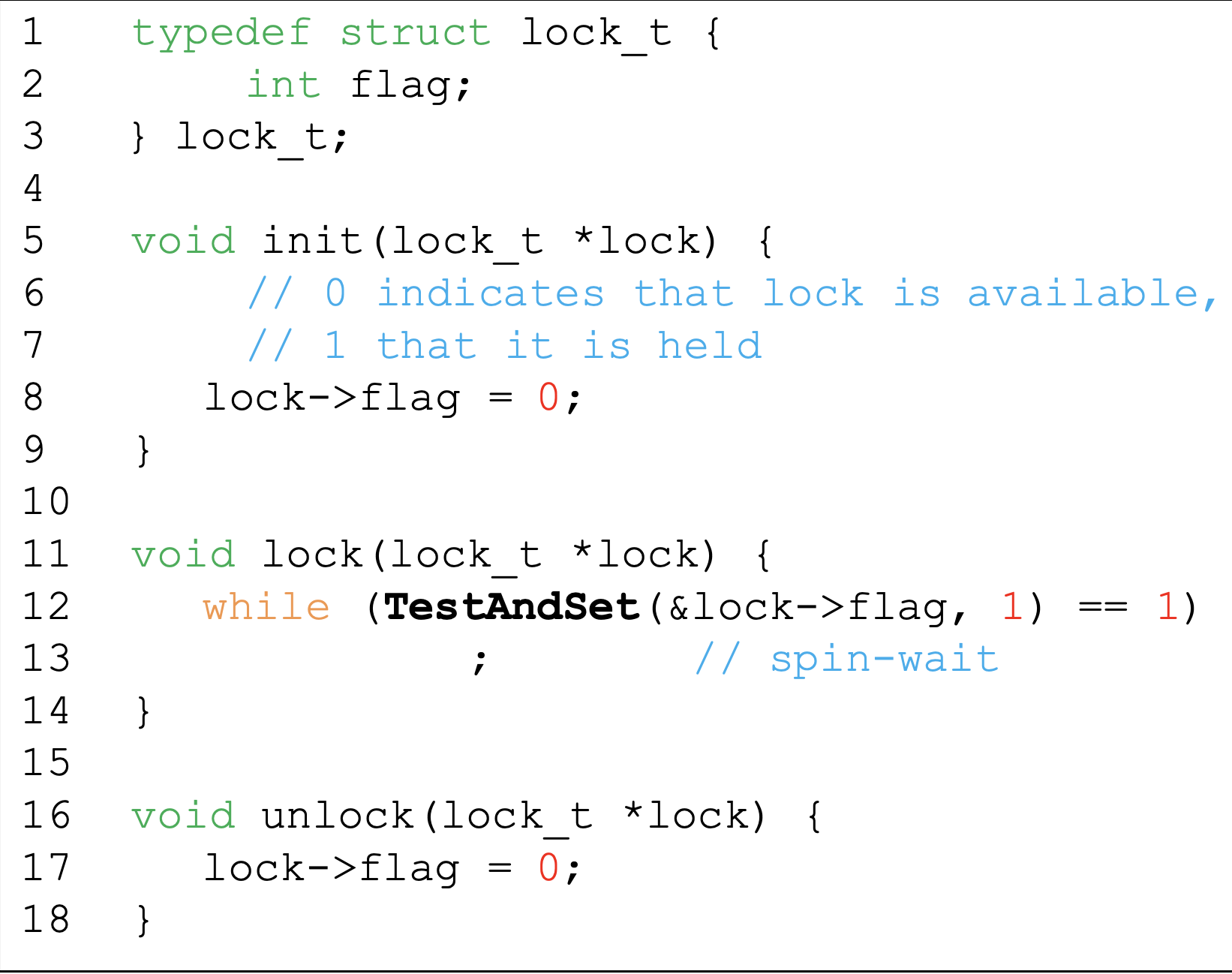
- First thread will return 0 and break the while loop
- Next threads will return 1 and spin-wait the while loop
Evaluating Spin Locks
- The lock operation is an atomic operation so that guarantees correctness
- Spin locks don't provide any fairness
- A thread spinning may spin forever
- In the single CPU, spinning overhead can be quire painful
- If the instructions in the critical section can be conducted shortly, spin lock can be efficient
xchg in x86
- lock prefix makes an instruction atomic
lock inc eax;
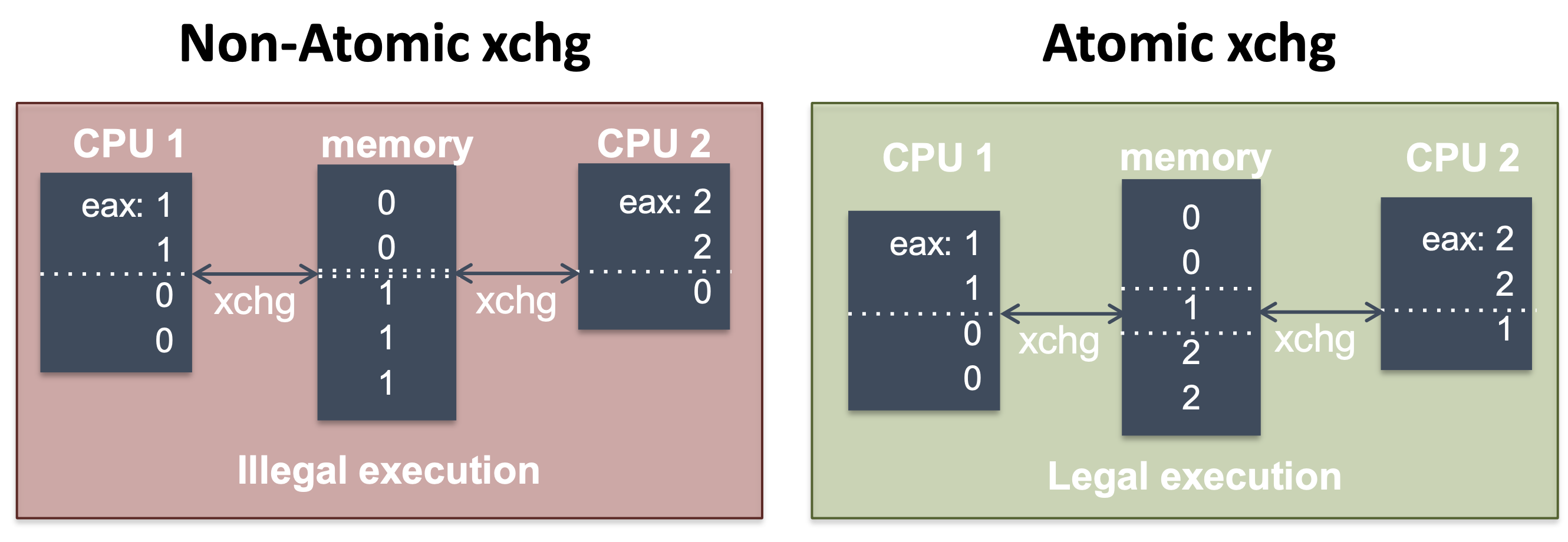
- xchg is guaranteed to be atomic
xchg eax, [addr];- swap eax and the value in the memory
- Atomicity ensures that each xchg occurs before or after xchg's from other CPUs
- Building a Spin Lock with xchg
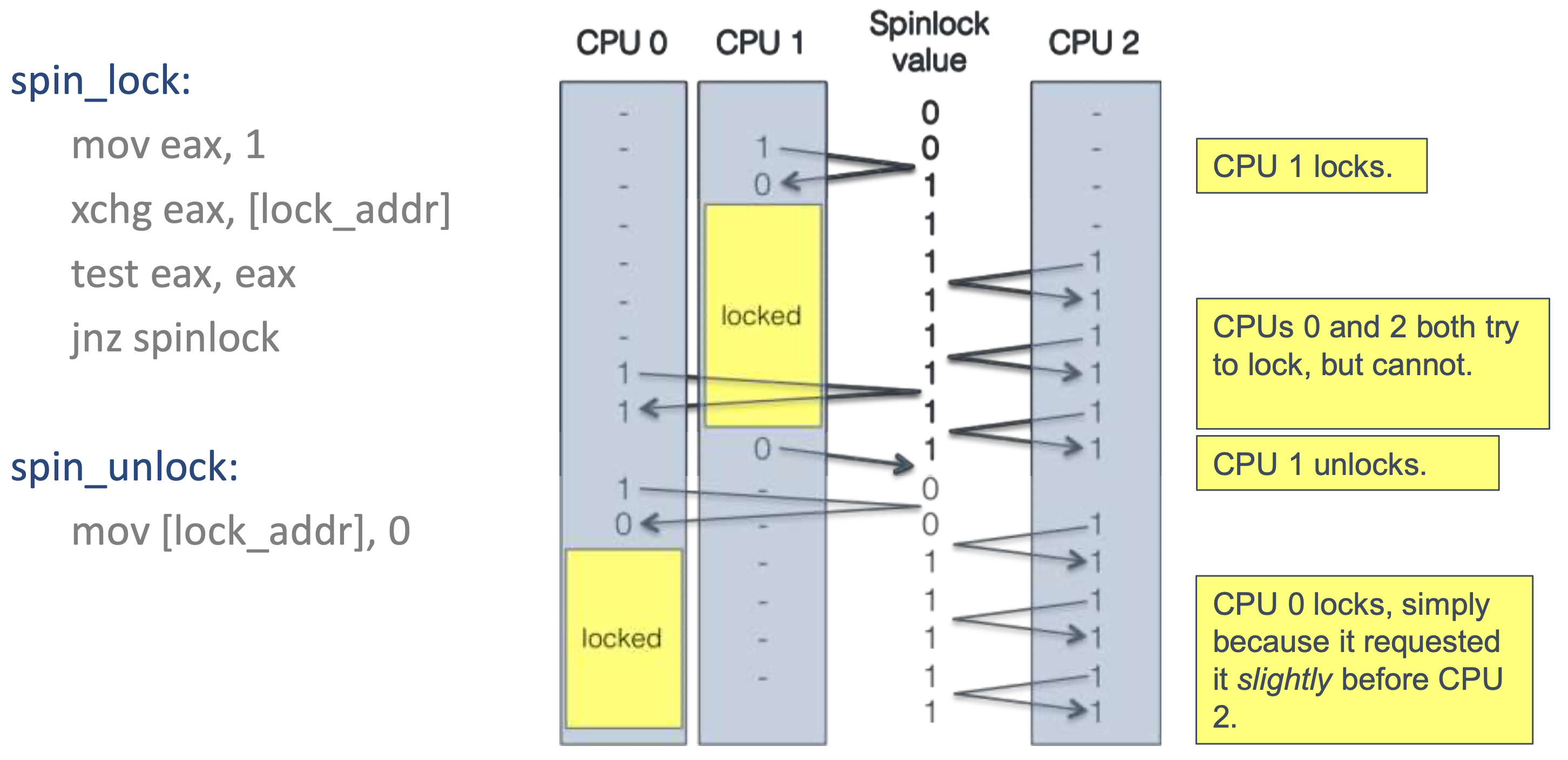
test: and operation- If the result is non-zero, loop the spinlock
xchgdo not set the Zero Flag, so we need test
- CPU wastes time because of the spin wait
The price of Atomicity
- Atmoic operations are very expensive on a multi-core system
- Caches must be flushed
- CPU cores may see different values for the same variable
- Case) Some CPUs read a value
-> A CPU acquire the lock and modify the value
-> Other CPUs have different value
-> we need to flush caches
- Memory bus must be locked
- Other CPUs may stall
- May block on the memory bus or atomic instructions
- Caches must be flushed
Compare and Swap
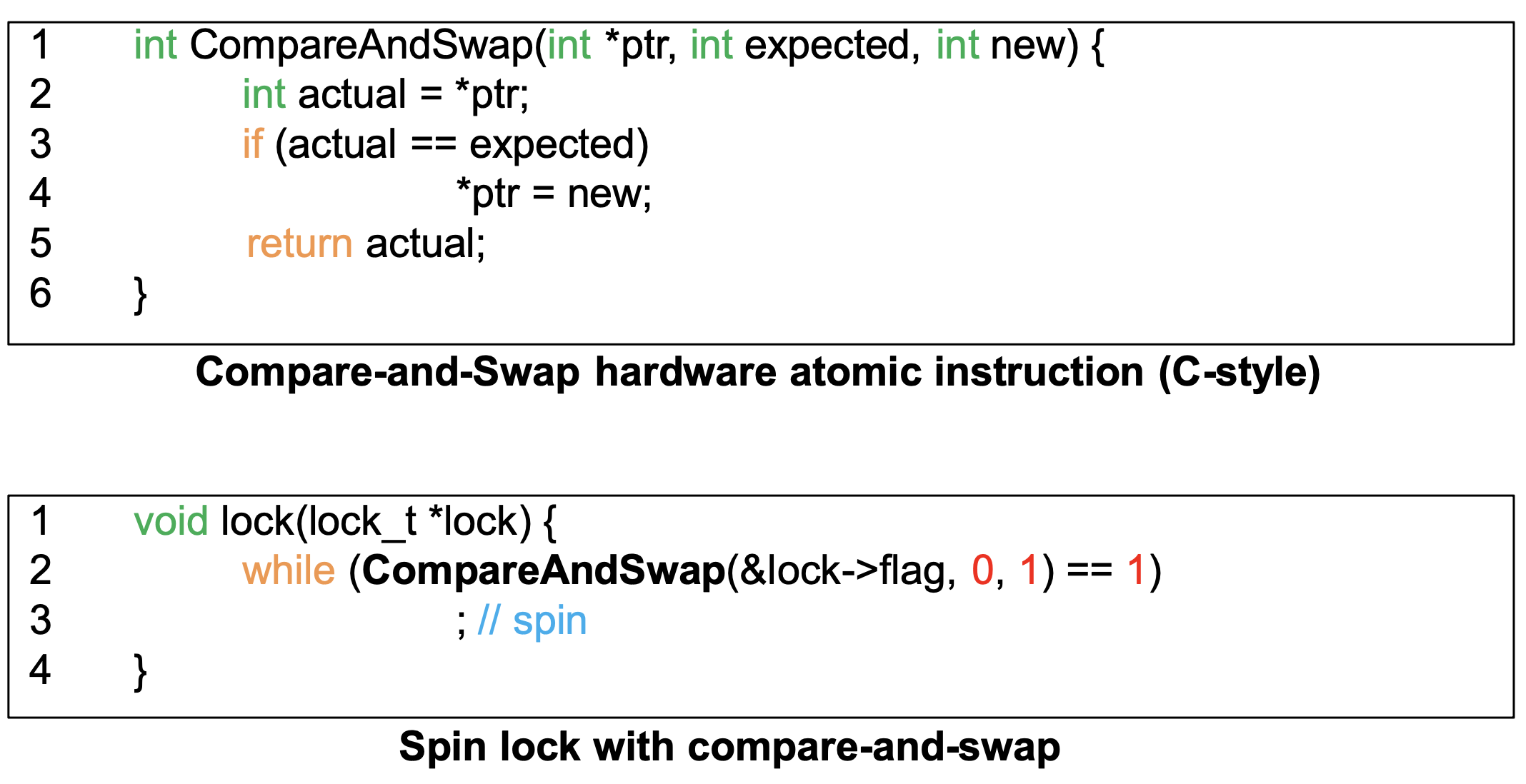
- If the value at the address is equal to expected, update the value with the new value
- Return the actual value
On x86, compare and exchange
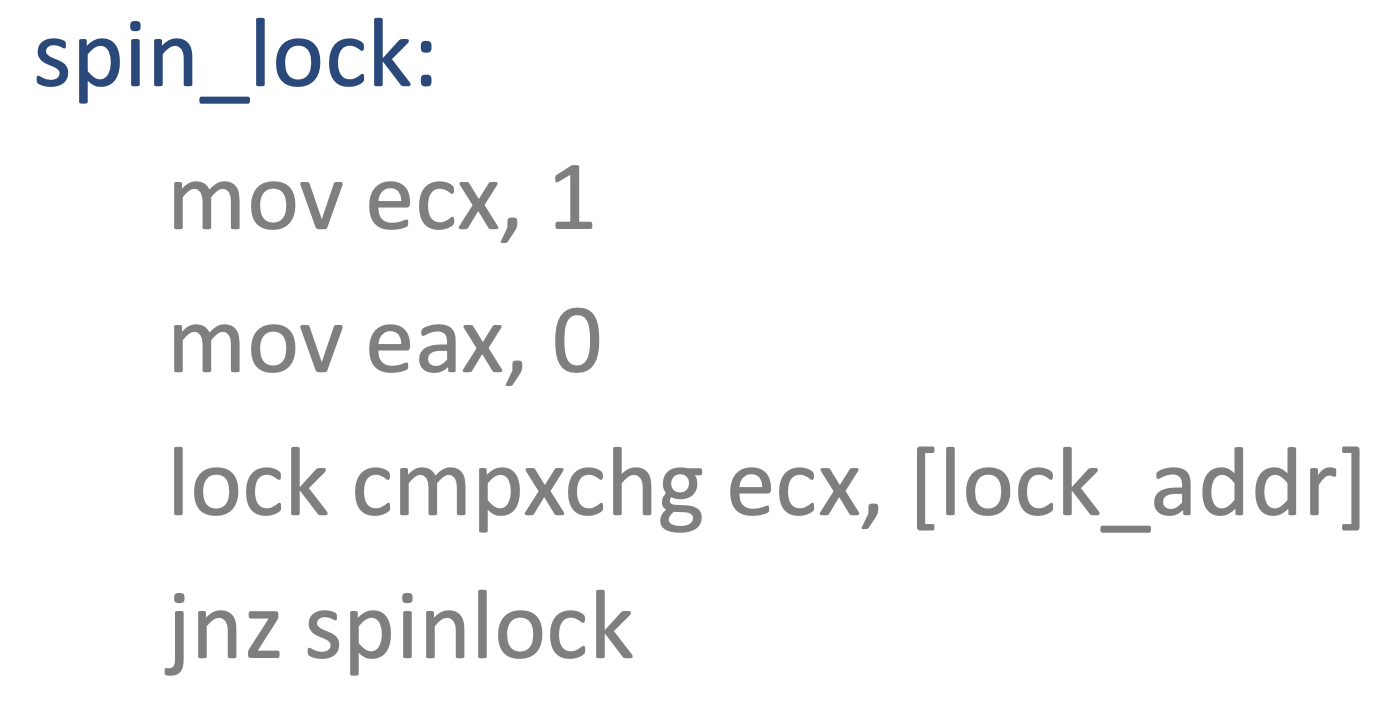
- Compare eax(expected) and the value of lock_addr
- If eax == [lock_addr], swap ecx and [lock_addr]
Load-Linked and Store-Conditional
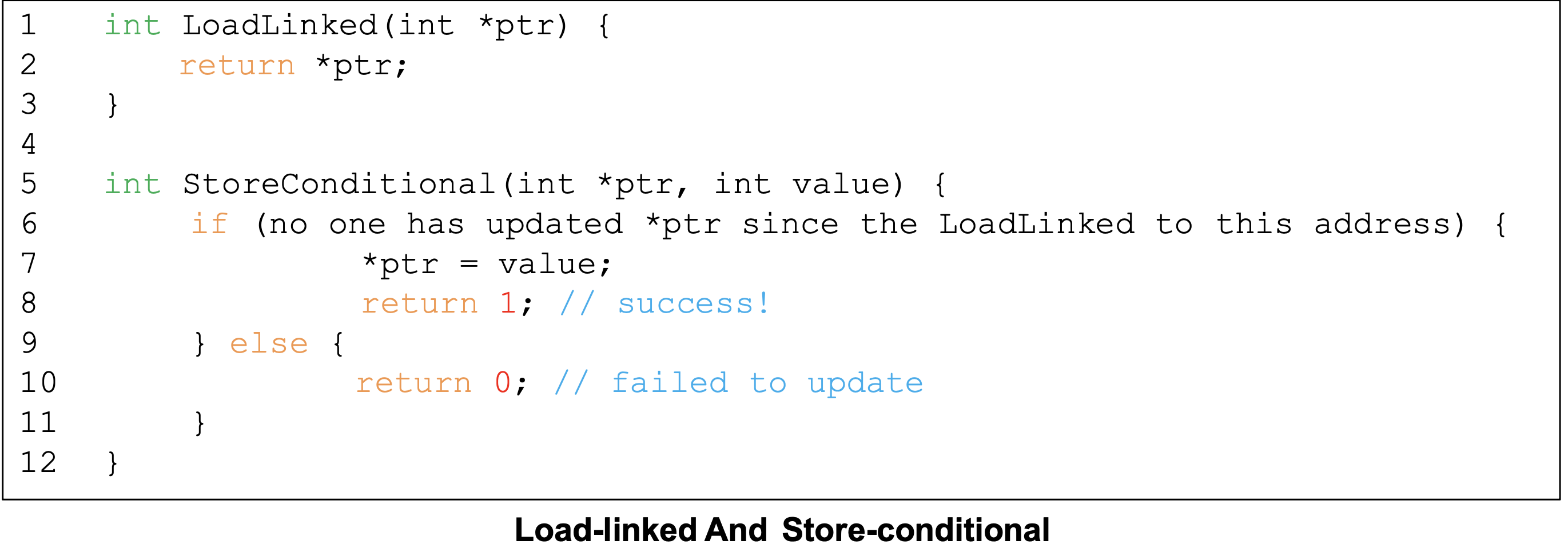
- In RISC architecture, the instruction that operates read and write at once doesn't exist
- If no intermittent store to the address, the store-conditional succeeds
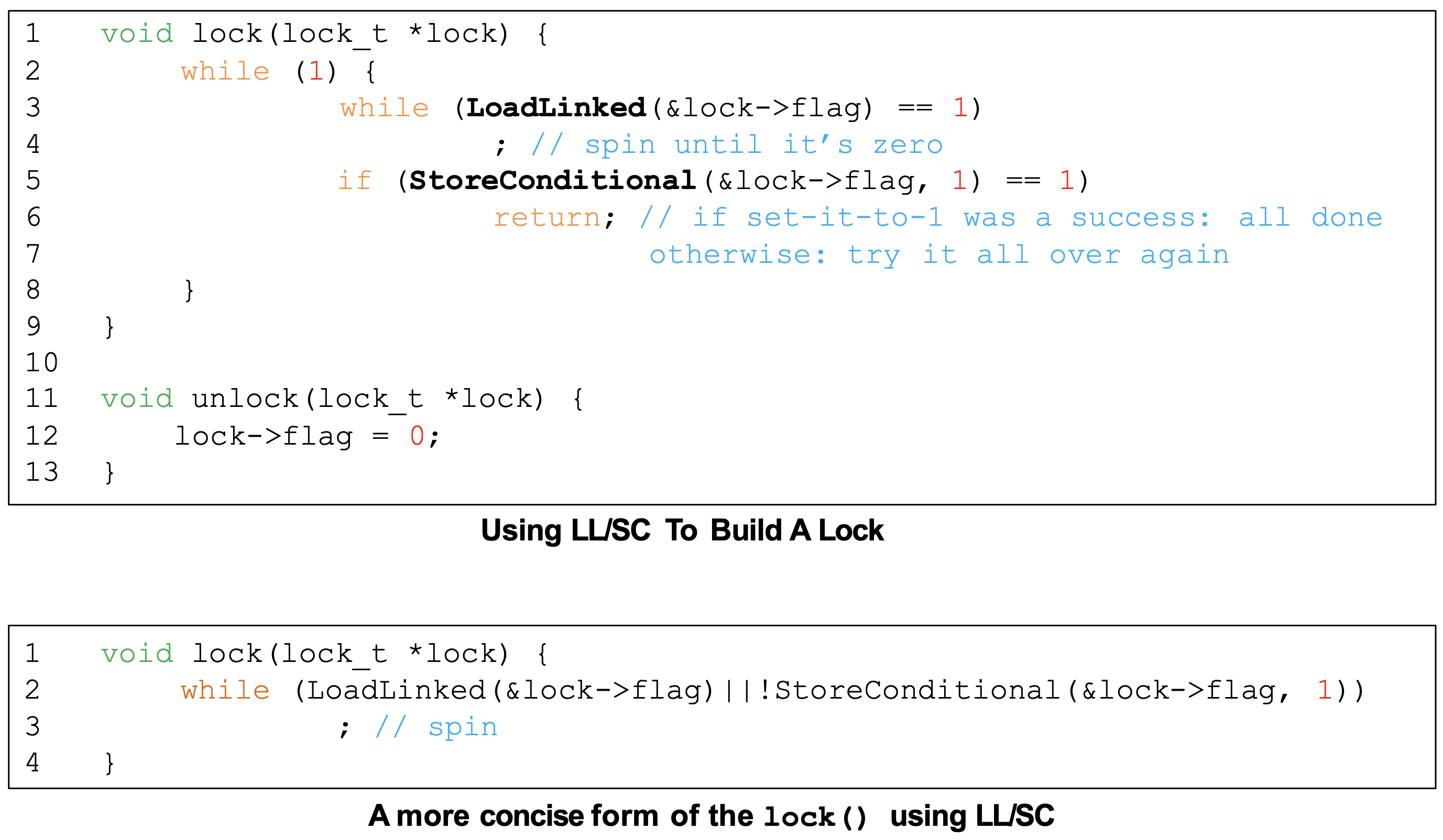
- Since while loop is used twice in code, spinning overhead is too large
-> Concise in 1 line
Fetch and Add
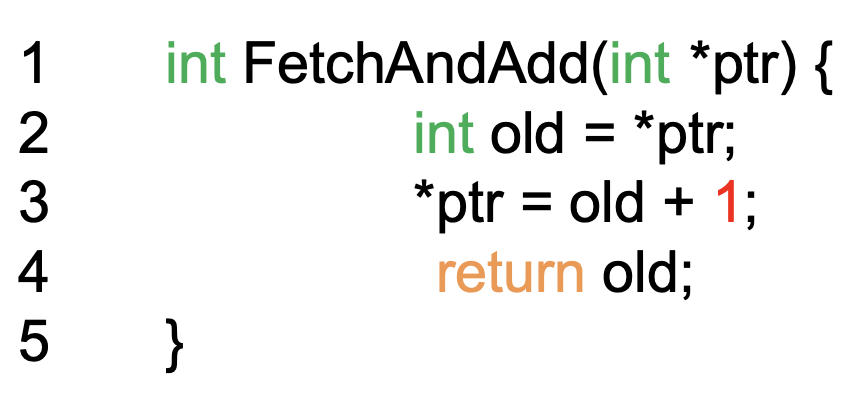
- Atomically increment and return old value
Ticket Lock
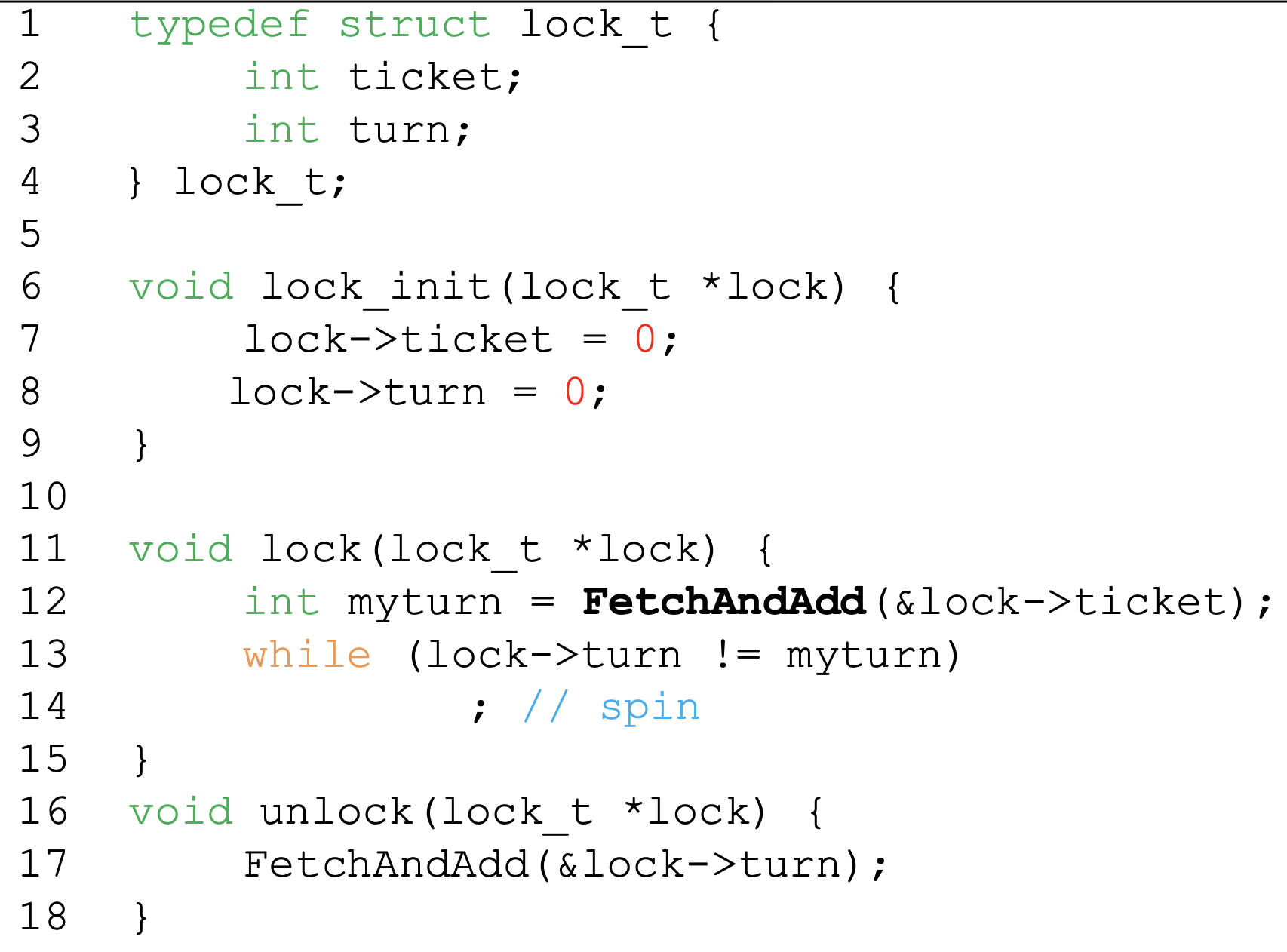
- All threads can acquire the lock in order of their requests
-> Ensure fairness
Approaches to handle spinning
- Any time a thread gets caught spinning, it wastes time doing nothing but checking a value
Just yield
- When you are going to spin, give up the CPU
- The cost of a context switch can be substantial and the starvation problem exists
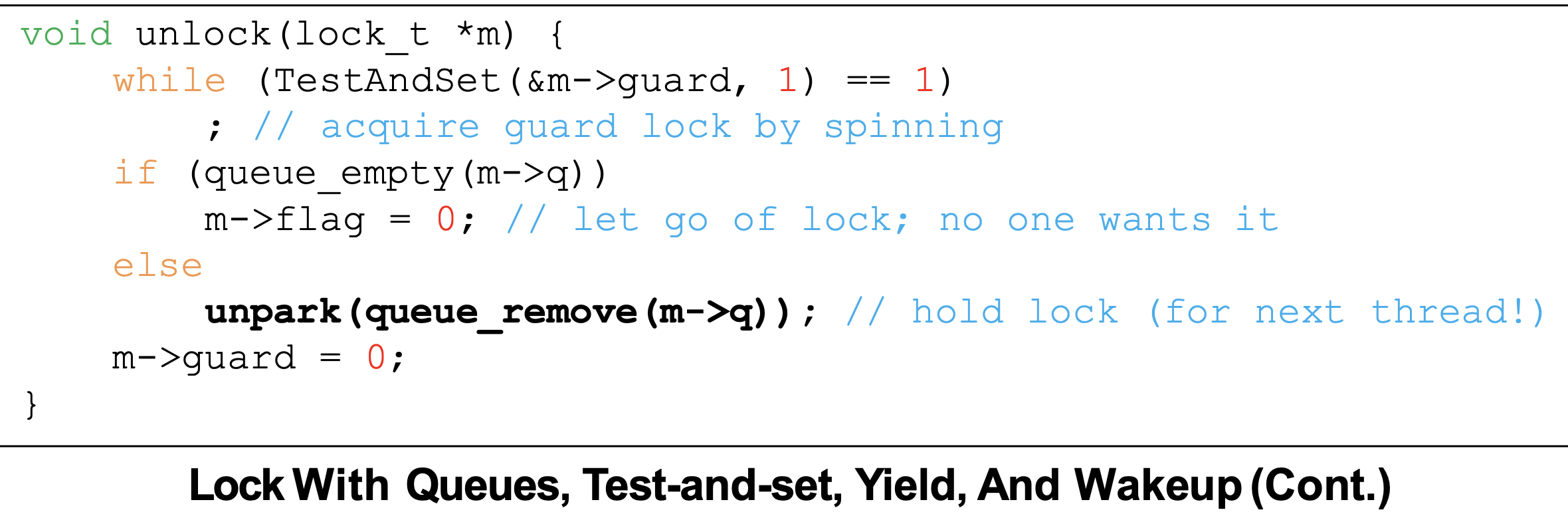
Using Queues
- Sleep until the unlock
- Queue keep tracks of waiting threads
- park()
- Put thread to sleep
- unpark(threadID)
- Wake a particular thread in the queue
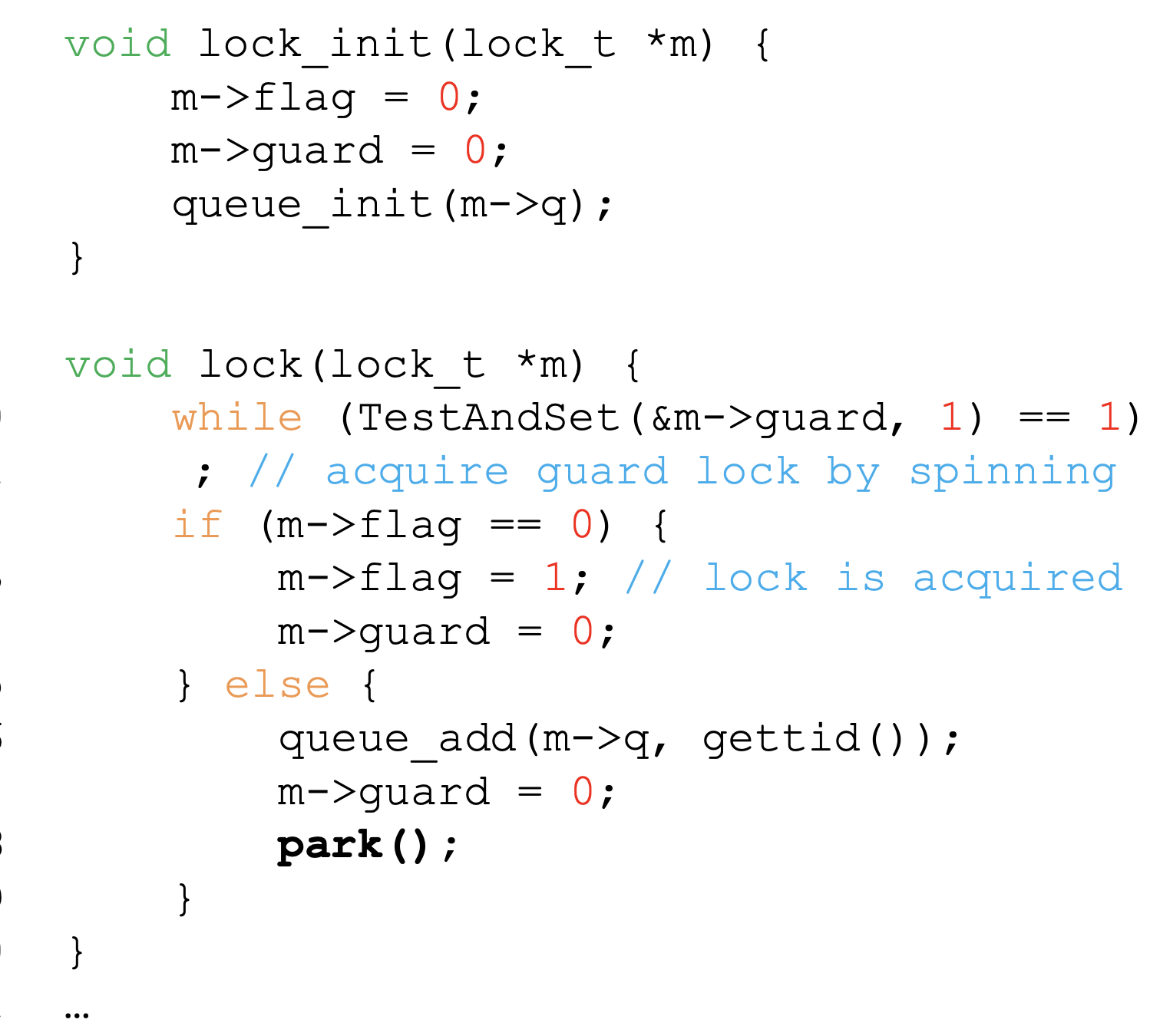
- If we send thread straight to the queue without a double lock(flag, guard),
it will take a long time to get the lock - So, sending thread straight to the queue is inefficient if you can get a lock quickly
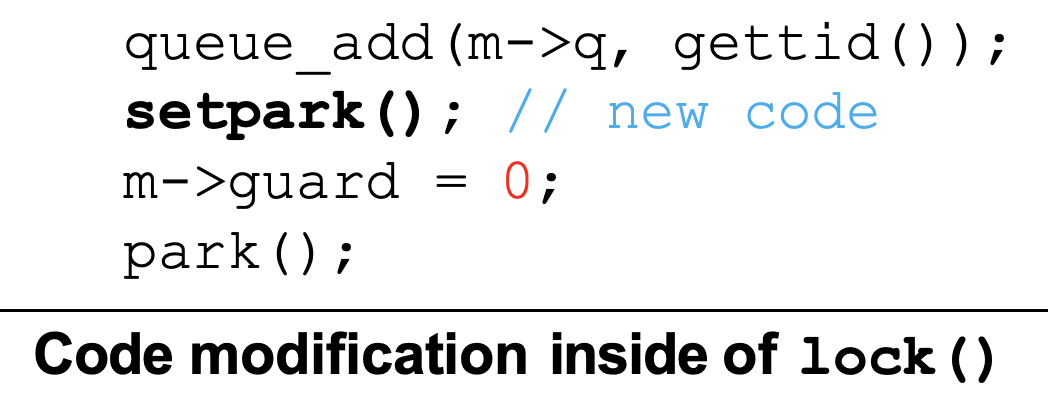
- Wakeup/waiting race
- Case) Release the lock (thread A) before the call to park() (thread B)
- Thread B sleep forever
- Solaris add a system call setpark()
- Inform a thread is about to park()
- If another thread calls unpark before park is actually called,
the subsequent park returns immediately instead of sleeping
- Case) Release the lock (thread A) before the call to park() (thread B)
Futex
- Linux provides a futex
- futex_wait(address, expected)
- If the value at address is not equal to expected, returns immediately
- futex_wake(address)
- Wake one thread
- futex_wait(address, expected)
Two-Phase Locks
- Spinning can be useful if the lock is about to be released
First phase
- The lock spins for a while, hoping that it can acquire the lock
- If the lock is not acquired during the first phase, a second phase is entered
Second phase
- The caller is put to sleep
