
💡 SVD 요약 : 매트릭스 연산(늘리고 돌리기)을 쉽게 보기 위해 나눔
- : Σ mxn 일때 함
- : 인버스를 구하고 싶어서 Σ mxm 정방 행렬 + full rank라고 하고 품
→ 위 조건을 만족하지 않으면 어떻게 풀까? singular value가 0이면?
⇒
psuedo inverse:0이 곱해져서 되는 것만 살리고 안 되는 것을 알아서 잘 해보자 한 번
: 수도 인버스 사용해 다음과 같이 변환 (Σ mxn)
Jacobian psuedo inverse :
Dammped
🖤 Singular Value Decomposition 🖤
📌 SVD Introduction
pseudo-inverse matrix를 이해하기 위해서는 svd를 이해해야 한다
- eigen decomposition and polar decomposition 연관이 있다.
- In linear algebra, the SVD of a matrix is a factorization of that matrix into three matrices
- factorization - 매트릭스를 조금 더 풀기 쉬운 것으로 쪼갠다
-> 수학적으로 풀기 쉬운 상황을 많이 만들어주기 때문
- factorization - 매트릭스를 조금 더 풀기 쉬운 것으로 쪼갠다
- Ax → 행렬 A를 곱한다는 것은
→Linear Transformation: 일반적으로 벡터는 회전을 하는 것 or 늘어나는 것 즉 늘리거나 돌리거나 한다는 것이다.
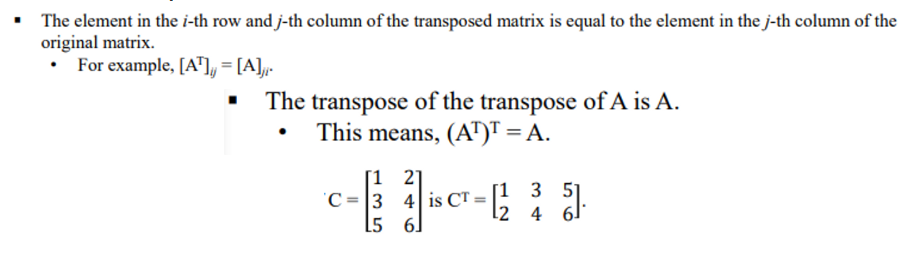
✔ Transpose
✔ Partitioned Matrix
매트릭스를 col 벡터들로 나누거나 row 벡터들로 나누는 것

📌 Eigenvalues & Eigenvectors
( 고유값과 고유벡터 )
u: Eigenvectorλ: Eigenvalues
- direction을 바꾸지 않고 벡터의 magnitude를 바꾸는 것은 scale을 곱하는 것밖에 없다
- a vector u, and a scalar quantity λ, λu
Au = λu
: u에다가 A를 곱해 회전하거나 스트래칭한 것과 똑같은 상황이 되는 λ를 eigenvalue of A 라고 한다
- 사실 중요한건 eigenvector이다.
어떤 매트릭스에 eigenvectoru를 곱하니 회전도 당하고 스케일리도 당했는데 사실은 그냥 스케일링 당한 거와 똑같게 된다는 것이다
📌 Eigen Decomposition of a matrix (AP = PD)
The matrix decomposition of a square matrix A into eigenvalues and eigenvectors is a kind of “matrix diagonalization.”
- A : eigenvalues들을 가짐

✔ Eigen Decomposition of a matrix
앞에서 Au = λu 를 설명함
→ 이것을 매트릭스 폼으로 AP = PD 로 만든다.
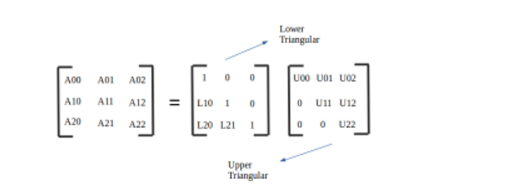
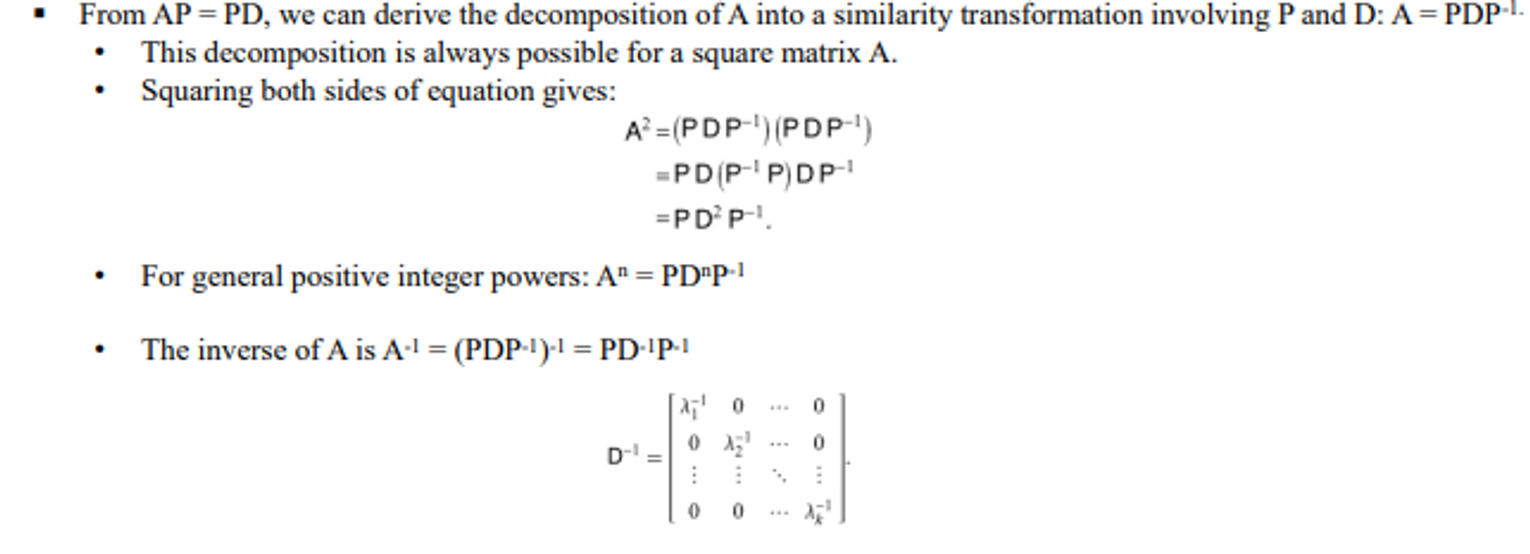
AP = PD를 만들면 P하고 D를 안다는 가정 하에 아래와 같은 꼴로 만들 수 있고 이로 인해 A의 역행렬도 다음과 같이 표현이 가능하다.

💭 예제
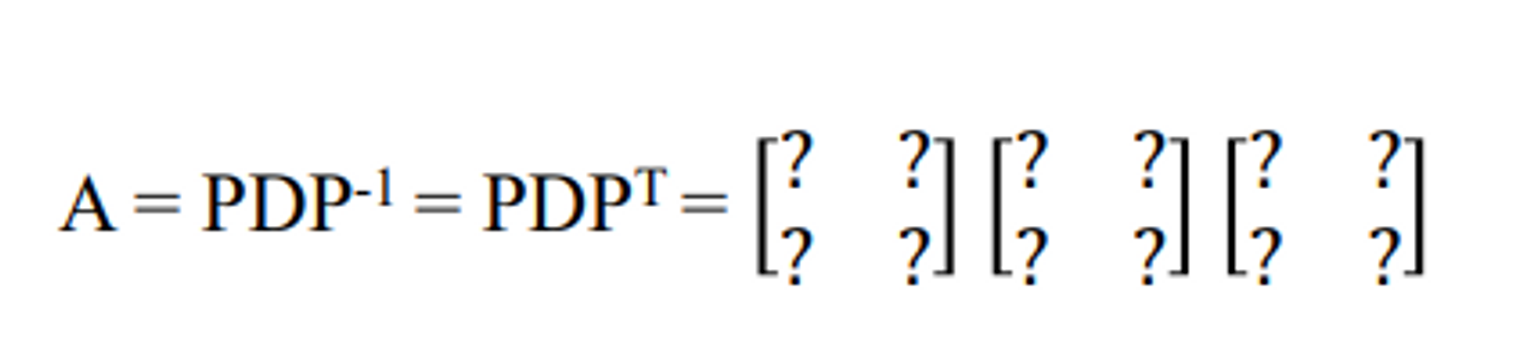
- P 가 orthogonal matrix 직교 행렬일때 아래와 같은 수식이 성립한다
orthogonal matrix : 직교 행렬
- Jacobian Transpose는 inverse를 구하지 않고도 풀 수 있는데 이게 바로 이 성질을 이용한 것
- 당연히 orthogonal이 아니기 때문에 잘 안되었던 것인데 그래서 그냥 너 거의 almost orthogonal이라는 가정을 하고 transpose를 한다
📌 Singular value
SVD를 설명하기 전에 일단 singular value A에 대해 이야기해보자
The singular values of a matrix are a set of numbers that can provide useful information about the matrix
→ Information? – matrix rank, pseudoinverse, etc.
- m×n matrix A
- singular values
- eigen value of 에 suqre root를 한 값
- denoted 로 표현, where i is the rank of A.
📌 Rank
- 선형대수에서 the rank of a matrix A is the dimension of the vector space generated by its columns
→ A의 랭크는 linearly independent columns of A 에 의해 결정됨
- 필수 불가결한 벡터의 개수
- full rank : m개가 전부 다 linearly independent , 이 매트릭스로 인해 표현되는 각 벡터들은 모두 자신만의 차원을 정의하는데 사용된다.
linearly dependent (선형 독립)
- set of vecter a, b, c가 있다.
→ c = 2a + b가 되면 c라는 벡터를 새롭게 정의할 필요 없이 a와 b로 나타낼 수 있다는 것이다.
→ [a b c] : Rank 2
→ Geomatric 관점 : c는 새로운 차원을 정의하지 않는다.
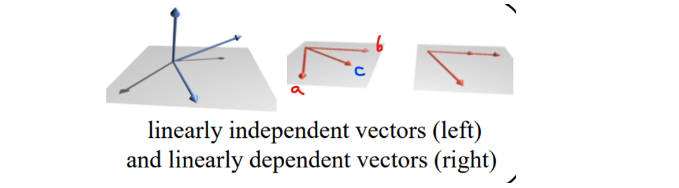
linearly independent
- 3차원 좌표계를 정의한 벡터들 x = [1 0 0 ] y = [0 1 0] z = [0 0 1]
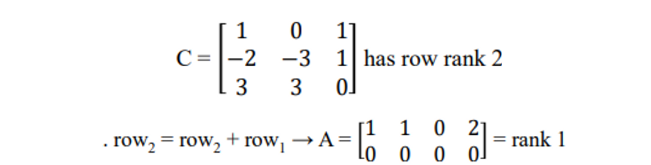
💭 Example
- 세번째가 linearly independent
- c = a - b
- 보통 이렇게 간단하게 나오진 않는다
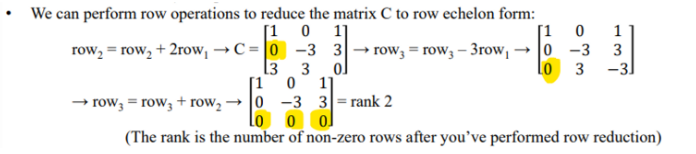
Then, how to solve?
-> 어떤 row가 0으로 변할 수 있는지 체크
row reduction
- 내가 현재 어떤 row가 있을 때 다른 것들을 어떻게 하면 되지?
→ 앞에 것들을 차례대로 0으로 만들면서 풀어 나간다.
📌 SVD
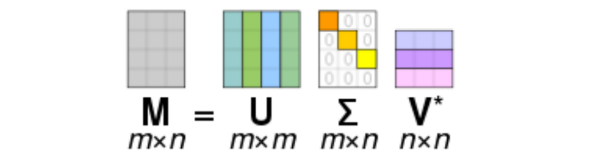
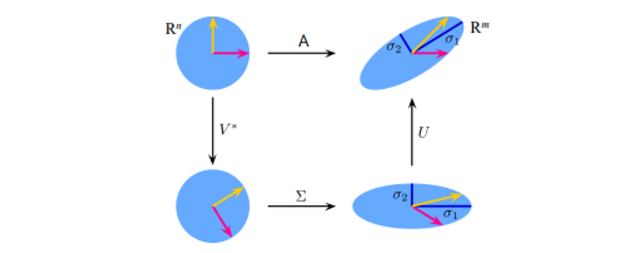
- The SVD of m×n matrix A is given by the formula
U: m×m complex unitary matrix.
→ col vec
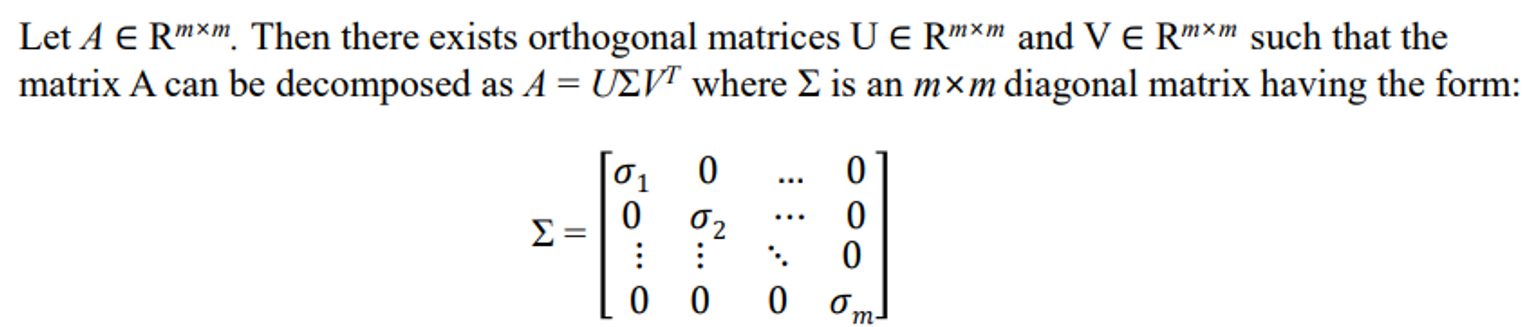
Σ: m×n rectangular diagonal matrix with non-negative real numbers of the diagonal.
→ 대각선에만 정보가 들어 있는
V: n×n complex unitary matrix.
→ row vec
→ unitary matrix : 를 만족하는 matrix
💁♀️ 실수부에서 다룰 때
- A가 실수 일 때, U와 V도 real orthogonal matrices, 이럴 때 SVD is often denoted
→ conjugate 는 허수부의 부호를 바꾸는데 실수라고 가정했으니 부호가 변하지 않는다. 즉 실수부만 쓰기로 했기 때문에 conjugate는 사라지고 transpose만 남는다
- Σ : A의 singular values
→ singular values : 의 eigenvale에 루트 씌운 값 (A를 분해할 때 사용)-
- The columns of U and the columns of V : left-singular vectors and right-singular vectors of A
→ sets of orthonormal bases
📌 Geometric meaning of SVD
- Eigenvector : it is stretched by the transformation
벡터에 매트릭스를 곱한다는 것은 포인트 벡터를 돌리고 늘리고 하는 것과 연관이 있는 이야기라고 했다. 즉 어떤 방향으로 늘어날지 Scaling에 관련된 것
stretch하는 방향이 Eigenvector와 관련된 것, 얼마만큼 땡길거냐는 Eigenvalue에 관한 값
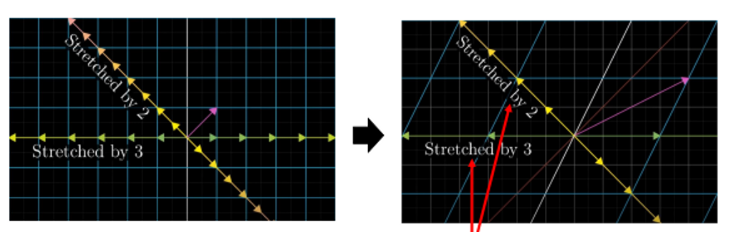
- 벡터를 돌리고 회전시켜 벡터가 아래처럼 변했는데 뭘했는지 알기가 너무 어렵다. 그래서 이해하기 쉽게 몇번의 회전 과 몇번의 늘림으로 표현한 것이 SVD이다
SVD를 사용하는 이유, 장점
- 매트릭스를 조작하는 과정에서 세분화해서 할 수 있다.
- 문제가 조금 더 쉬워진다. 단순한 로테이션과 스케일링으로 나타냈기 때문, 이를 나중에 다른 조작으로 풀어내기 쉬워지기 때문에 많이 사용한다.
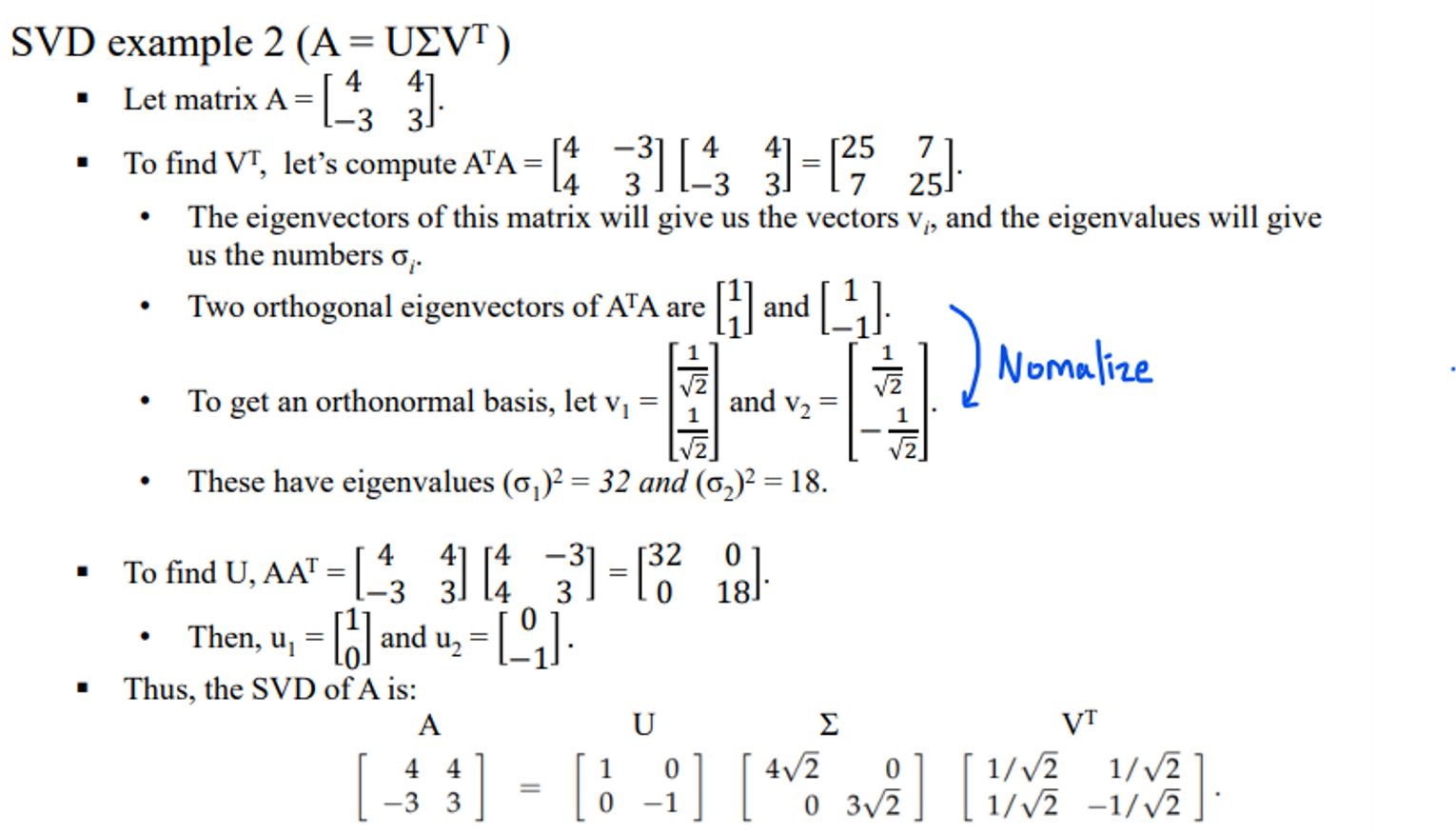
📌 SVD calculation ( )
SVD를 실제로 계산하기 위해서는 를 이용해야한다.
실제로 계산하기 위해서는 머리가 터지지만 pyhton에서 get svd 하면 빰하고 나오지만 계산과정을 알아야 뭔갈 할 수 있기 때문에 지금부터 배워보겠다.
- The eigenvectors of make up the columns of V
- The eigenvectors of make up the columns of U.
- The singular values in Σ are square roots of eigenvalues from → 두개의 eigenvalue결과가 같아서 어떤 걸로 해도 상관이 없다
SVD Example
💁♀️ 여기까지..
지금까지 psuedoinverse를 풀기 위한 기초였다. Eigenvalue, SVD 등을 배웠다.
이제부터는 Jacobian의 psedoinverse를 풀기 위한 방법을 배울 것이다.
🖤 The Moore-Penrose Pseudo Inverse 🖤
📌 Moore-Penrose inverse
-
inverse matrix를 구할 때 가장 많이 사용
-
보통 별도의 표시가 없으면 Moore-Penrose inverse 다.
-
그냥 수도 인버스라고 부르기도 함
-
보통 수도 인버스를 활용하는 가장 많이 사용하는 예시가 best fit
-> 내가 주어진 데이터에 가장 근사한지 할 때 -
entries가 real 이나 complex로 되어 있으면 보통은 unique한 해를 갖는다
📌 Pseudo-Inverse and Least Squares
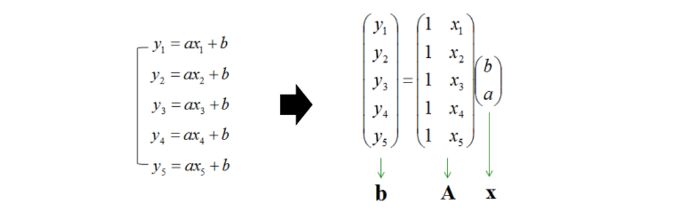
The method of least squares is a way of “solving” an overdetermined system of linear equations Ax = b, a system in which A is a rectangular m×n matrix with more equations than unknowns
overdetermined
- 너무 관측값이 많은 것
- y = ax + b 이면 식이 2개가 있으면 연립방정식을 풀 수 있다. 그런데 주어진 연립방정식이 너무 많은 경우가 이에 해당한다.
- 게다가 이 모든 것들이 노이즈가 껴 있어서 하나의 식으로 수렴하지 않아 문제가 된다.
-
계속해서 반복해 대입하면서 에러를 최소화한다.
-
this point moves along a straight line y = dx + c
작은 오브젝트의 모션을 관측했다고 가정해보자
단위 시간 동안은 직선 운동을 한다고 가정하자
-
3개의 위치를 관측했다. 다음과 같은 equation을 만들 수 있다.

-
관찰에 노이즈가 껴 있기 때문에 직선 운동을 한다고 했지만 딱 직선 위에 관측이 안될 수 있다.
-
즉 에러가 존재해 SYSTME이 풀리지 않을 수 잇다.
-
에러가 있을 것 같으니까 e를 더해준다.
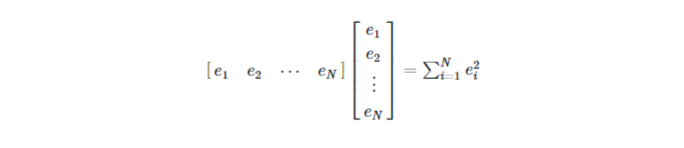
그리고 e 빼고 다 이항 시킨다. 그리고 이것들을 모두 더하면 sum of the squares of the errors (SSE) 이 된다.
⇒ 즉 SSE를 0으로 만드는 방식으로 해를 구해야한다

- We can rewrite the problem as y = Ax + e.
- Our goal is to minimize
- 풀면 다음과 같다.

- 편미분에 대한 정의로 풀면 아래와 같이 된다.

- 따라서 다음과 같이 말할 수 있다

🖤 SVD and Pseudo Inverse 🖤
Moore-Penrose inverse 는 조건이 만족되어야만 쓸 수 있다. 근데 대부분의 상황에서 조건이 만족이 되고 만족이 안되더라고 하더라도 너는 만족이 된다 최면을 걸고 썼다. 근데 엄밀히 Moore-Penrose를 쓸 수 없는 상황이 있다. 그럴 때 SVD Pseudo Inverse를 사용한다.
📌 Pseudo Inverse and SVD
✔ computing inverse matrix using SVD
- 앞에서 배울 때는 Σ가 mxn matrix 였는데 여기서는 mxm이다
→ 왜냐면 앞에서 inverse matrix가 존재한다고 가정을 이미 했기 때문이다. inverse 가 존재하려면 mxm(정방행렬)이어야 하기 때문이다.
-
: singular values of the matrix A
-
the columns of U : left singular vectors
-
the columns of V : right singular vectors.
-
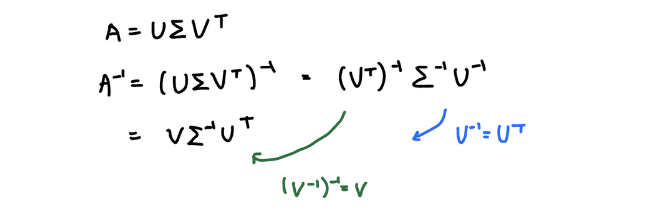
U and V are orthogonal
→ their transposes are equal to their inverses ,
→ Then, the inverse of A can be determined by , where
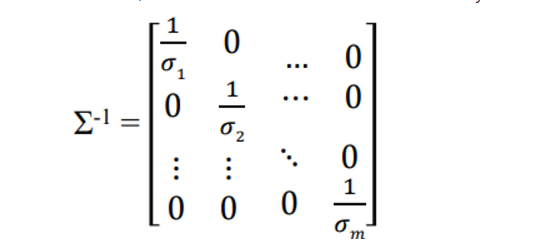
→ 근데 이 식을 봤더니 A의 inverse를 한 것이 그냥 A랑 거의 비슷하므로 이제 을 사용하게 된다.
💁♀️ 문제점
- 앞에서는 쉽게 구했다. 가 그냥 싱글러 밸류 역수이고 U랑 V도 다 알고 있으니 엄청 빠르게 구할 수 있었다.
→ 근데 우리가 이걸 mxm 매트릭스라고 가정하고 풀었다.
싱글러 밸류가 m까지 다 들어가 있는 full rank이다. 두가지 조건이 들어간다. A 매트릭스가-
Full Rank matrix ( A가 zero singular value를 갖지 않음)
-
mxm의 square matrix
⇒ 근데 이렇게 되면 nxm의 overdetermined 문제를 풀지 못한다.
-
그래서 psuedo inverse가 튀어 나온다.
In overdetermined systems matrix A does not have a unique inverse
-
만약에 full rank가 아니어서 시그마 값중에 0이 존재하면 은 존재할 수 없다.
→ 1/0 등장해서 인버스를 구할 수 없는 상황이 된다
-
더 자세하게 말하면, 싱글럴 밸류 0을 가지고 있으면 ..
destory → geometry하게 설명을 해야한다.
어떤 매트릭스 A를 곱했다는 것은 다른 차원으로 A가 날라갔다는 것을 의미, 은 다시 돌아온다는 것을 뜻함.→ 근데 싱글러 밸류에 0이 존재한다는 것은 차원을 넘어갈 때 싱글러 밸류 0이 간섭해서 곱해지는 데이터가 날아간다는 것이다. 원본데이터가 1 2 3 이든 0이 곱해져서 다 사라지는 것이다. 이로 인해 A의 역으로 가려니까 뭔지 모르겠는 것이다.
⇒ 즉 0을 곱함으로 인해 데이터가 소실된다는 것이다
0을 곱해 없애는 대신 어떻게든 살려보려는 노력을 해보자
-
The matrix that recovers all recoverable information is called the pseudo-inverse and is often denoted A†
→ 완벽하게 복원 못하는 것을 맞으나 일단 복원가능한 애들은 복원해
→싱글러 밸류를 곱해 차원 변환이 되었는데 반대로 가는 클루들이 충분해 복원할 수 있는 것들은 복원하고 잘 모르겠는 애들은 적당히으로 왠지 이거일 것 같으데 느낌으로 복원
→ 이것이 psuedo-inverse를 구하는 것이다.
-
0이 아닌 싱글러 밸류 쪽을 기존과 같이 만들어주고 나머지들은 그냥 0으로 둔 상태로 곱한다
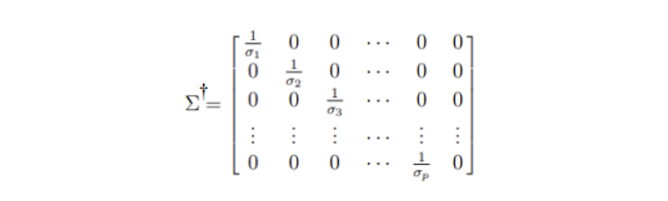
- 이전에는 이었는데 으로 바뀐다
📌 Jacobian Pseudo-inverse
- The pseudo-inverse of the Jacobian matrix is used when the matrix is not square or not invertible
수도 인버스 자코비안은 매트릭스가 스퀘어가 아니거나 인버스가 아닐 때 사용하게 된다
✔ pseudo-inverse of J :
-
n x m matrix
-
best possible solution to the equation 을 제공한다
→ 세타가 주어졌을 때 end effecter의 desired 포지션 in change가 나오는 식이다. 원래는 FK에서는 이건데 F라는 함수가 그냥 J라는 linearly approximation된 것으로치환해버리고 델타 세타 관측 개념으로 현재 내가 관측한 시점에서의 리니어 모션으로 approximation하는 것으로 정의했었다.
→ 그리고 이게 FK였기 때문에 반대로 풀어 IK를 구하려면 를 구해야한다. end effecte가 어떻게 움직이는지 position을 알고 있으면 나머지 관절들의 회전값이 구해지는 문제로 바꾸었다.
→ 여기서 이 필요했다. 근데 이게 없는 상황들이 종종 존재했다. 그래서 를 풀어야 한다. 그렇기 때문에 J의 psuedo inverse를 구할 수 있으면 IK문제가풒ㄹ린다.
- 위에 두 개는 Moore 방식을 의미
- m≥n : overdetermined
- m<n : underdetermined (식이 부족함)
- 두 조건이 다 안되면 SVD로 풀어야 한다

🖤 Damped Least Squares 🖤
📌 Introduction to Damped Least Squares (DLS)
💭 앞서 언급한 것들에 치명적인 문제
-
싱글러 밸류가 0 근처에 갔을 때 오작동을 잘 일으킨다
수도 인버스를 사용하는 이유가 싱글러 밸류 문제를 잘 풀기 위해 사용하는 것도 있는데 싱글러 밸류 문제 근처에서 오작동을 일으키는 것을 잘 풀어보기 위해 제시되었다.
-
일반적인 인버스로 풀게되면 singularity problem을 절대 풀지 못한다
→ 혹시 풀 수 있다고 하더라고 singularity 근처에서 잘 안 풀린다.
-
이것을 해결하기 위해 수도 인버스가 등장한 것이다.
-
하지만 수도 인버스가 singularity 에서는 문제를 잘 풀지만 singularity 근처에서는 큰 오작동을 일으킨다.
-
이게 오작동을 일으키는 이유가
중간에 을 하는데 1/0이 되는거가 singularity problem이다.
근데 이 σ가 0하고 가까워도 무한대로 가까워진다. 해가 구해지긴 하는데 갑자기 발산해버리면서 원하는 해가 안나온다.
-
그래서 Damped Least Squares가 나오게 된다.
✔Levenberg-Margquardt method
-
를 한다. 이때 λ 는
tuning parameter이다 -
요 친구를 이용해 damping을 함
-
λ가 충분히 커야 한다.

- 이런 것들을 정리하면 최종적으로 나오는 값은
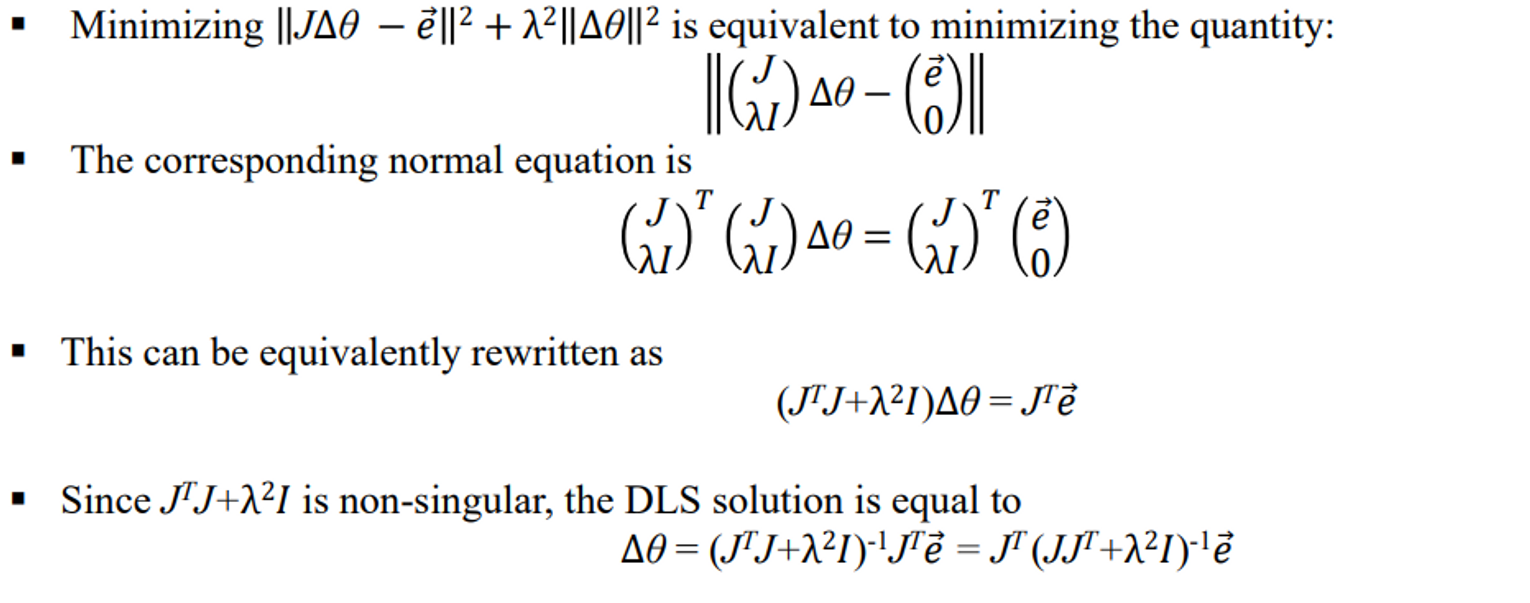
이거다!
⇒ 분모에 을 더해주어 0으로 가는 것을 막음

📌 Pseudo-inverse Damped Least Squares
- 형광펜 친 부분을 수학적으로 욱여넣었다

- 그래서 풀어봤더니 요러케 나왔다.
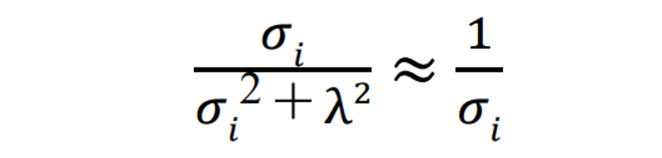
-
람다 근처까지는 값이 믿을 만하다는 이야기.
⇒ 람다를 설정함으로 인해 싱귤러리티 문제와 가까워지는데도 조금 더 stable하게 문제가 풀린다
-
그냥 least sqaure를 보면 싱굴러리티 근처에서 값이 막 발산함
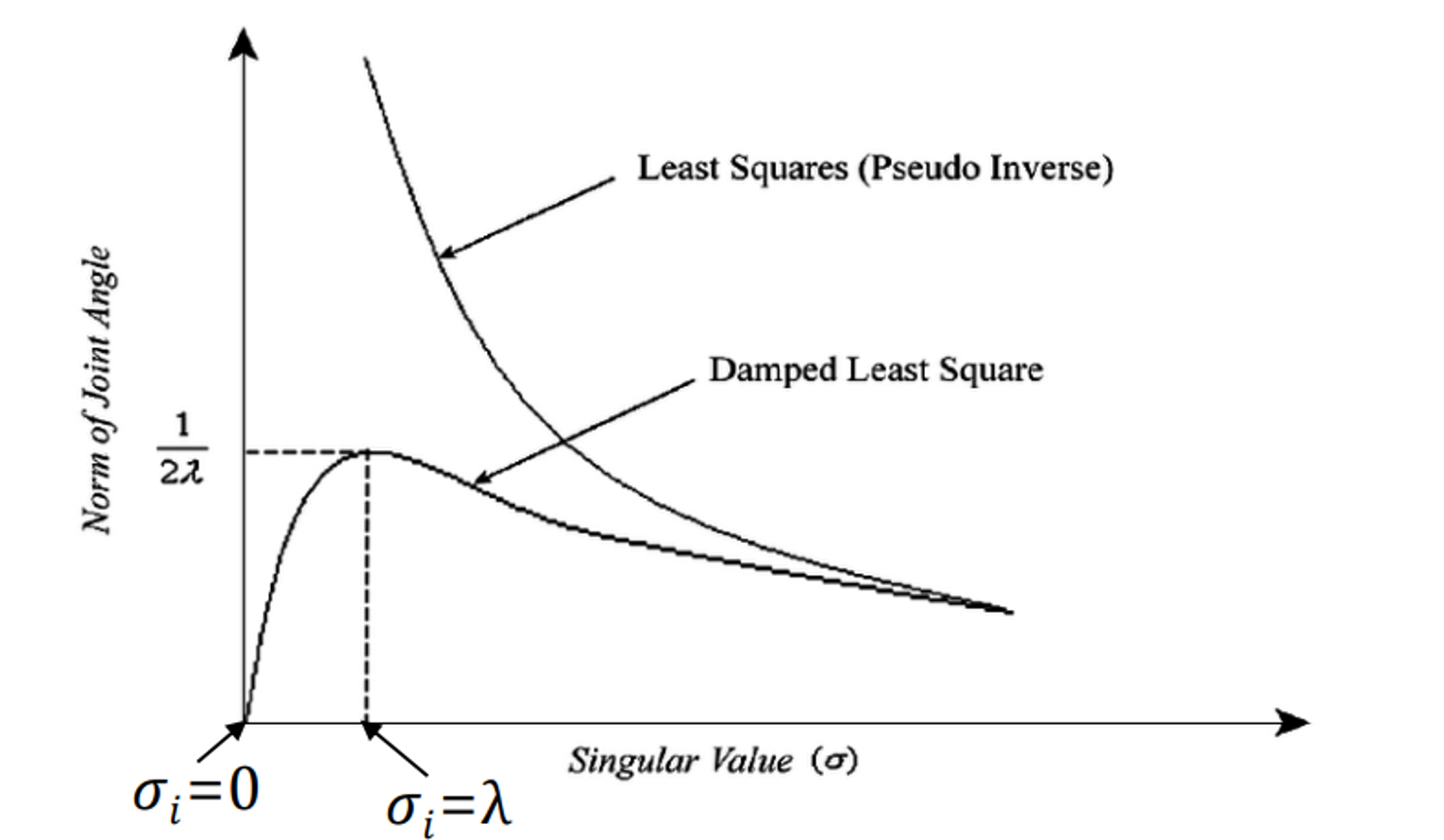
🧐 Damped Least Squares 정리
싱귤러리티 근처에서 발산하는 문제가 있어서 이 싱귤러리티 근처에서는 스테이블 하게 문제가 안 풀린다. 그래서 damping이라는 것을 분모에 넣어줌으로써 그 값 근처에서 까지는 stable하게 문제가 풀리도록 맞춰준 것이다.
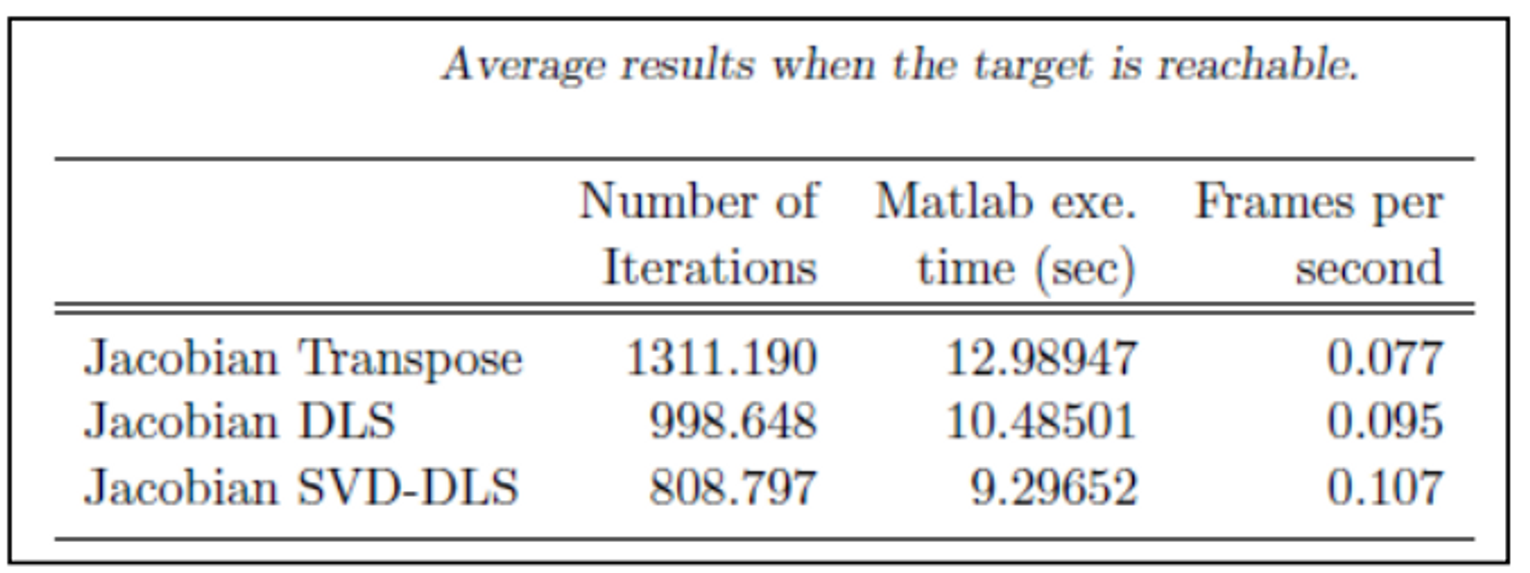
자코비안을 이용하는 것은 실전에서는 거의 안 쓴다. 다음 포즈 취하는데 0.1초 걸리는 것은 말도 안된다. 90년대 등장했을 때 로봇에 관점에서 많이 문제를 풀었다. 이 때 당시에는 느려도 상관이 없었고 문제 자체를 정의하는 것이 중요했다. 하지만 요즘은 빠르게 계산이 되어야 한다.
그러나 자코비언은 IK가 아니어도 다른 많은 곳에서 쓰이기 때문에 알아두면 좋다.
🖇 Reference
해당 포스트는 강형엽 교수님의 게임공학[GE-23-1] 수업을 수강하고 정리한 내용입니다.
