
개요
본 블로그 포스팅은 수도권 ICT 이노베이션 스퀘어에서 진행하는 인공지능 고급-시각 강의의 CNN알고리즘 강좌 내용을 필자가 다시 복기한 내용에 관한 것입니다.
0. Tensor - Numpy
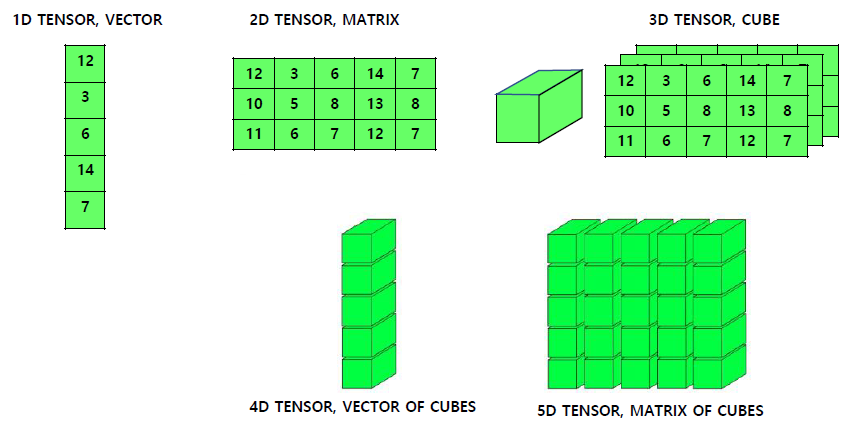 강의에서 Tensor 자료형과 이를 다루기 위한 Numpy자료형의 변환, 그리고 Numpy자료형으로 전환시 이점과 사용 가능한 메서드에 대한 강의가 진행되었으나, 짧게 설명하고 넘어가겠다.
강의에서 Tensor 자료형과 이를 다루기 위한 Numpy자료형의 변환, 그리고 Numpy자료형으로 전환시 이점과 사용 가능한 메서드에 대한 강의가 진행되었으나, 짧게 설명하고 넘어가겠다.
n1 = np.arange(24).reshape(3,-1)np.reshape메서드에서 마지막 -1 항목의 경우 자동계산에 속하는 것으로, [3x?]배열로 마지막 ?는 알아서 채우라는 뜻이다.
현재 코드로는 n1은 np.arange로 1차원 리스트에 원소가 24개이니 자동으로 [3x8]행렬로 재배치된다.
# 1차원 텐서 생성
a = torch.arange(6)
print("원래 텐서:\n", a)
# 2차원 텐서로 변경
view_tensor = a.view(2, 3)참고로 np.array보다는 Tensor 자료형에서 직접 모양 변환을 더 많이 사용하며, 이때 torch.view() 메서드를 사용한다.
n3 = np.arrange(24).reshape(2,-1, 4)
n4 = np.transpose(n3, (1,2,0))2차원 이상의 np.array형태 자료형은 axis번호로 차원의 축을 관리하는데, 0, 1, 2,,, 이런식으로 번호를 매긴다.
이 축의 순서를 교체하는 메서드가 np.transpose이다.
x1 = np.array([0, 1, 2])
x1_1 = np.expand_dims(x1, axis=0)np.exepnd_dims은 np.array 자료형의 차원 확장하는데 사용되는 메서드이나
차원의 확장, 축소는 Tensor자료형을 numpy 자료형으로 변환해서 작업하기 보다는
Tensor자료형에서 torch.squeeze, torch.unsqueeze메서드를 활용해 다이렉트로 차원관리하는 경우가 더 많다.
tensor_1 = torch.tensor([[[1, 2, 3]], [[4, 5, 6]]])
#0번째 차원 제거
tnesor_2 = tensor_1.squeeze(0)
#0번째 차원 추가
tensor_3 = tensor_1.unsqueeze(0)다음으로 행렬을 연결하는데 사용되는 np.stack메서드이다.
# 두 개의 2차원 배열 생성
a = np.array([[1, 2, 3], [4, 5, 6]])
b = np.array([[7, 8, 9], [10, 11, 12]])
# 새로운 축(axis=0)을 따라 배열 쌓기
stacked_array = np.stack((a, b), axis=0)
print(stacked_array)
print("shape:", stacked_array.shape)
# 새로운 축(axis=1)을 따라 배열 쌓기
stacked_array = np.stack((a, b), axis=1)
print(stacked_array)
print("shape:", stacked_array.shape)
# 새로운 축(axis=2)을 따라 배열 쌓기
stacked_array = np.stack((a, b), axis=2)
print(stacked_array)
print("shape:", stacked_array.shape)이 또한 Tensor자료형을 연결(concatenate)하는 메서드인 torch.cat을 더 많이 사용한다.
# 2차원 텐서 생성
t1 = torch.tensor([[1, 2], [3, 4]])
t2 = torch.tensor([[5, 6], [7, 8]])
# 0번째 차원을 따라 연결 (행을 기준으로 연결)
result_dim0 = torch.cat((t1, t2), dim=0)
print("0번째 차원을 따라 연결 결과:\n", result_dim0)
# 1번째 차원을 따라 연결 (열을 기준으로 연결)
result_dim1 = torch.cat((t1, t2), dim=1)
print("1번째 차원을 따라 연결 결과:\n", result_dim1)1. 합성곱 연산
입력 데이터에 대하여 필터(커널)을 적용해 새로운 합성곱 결과물을 결과를 만들어 내는 것이 Convolution Neural Network(CNN)의 기본이라 볼 수 있다.
이 CNN은 시각 데이터 처리에 효과적이고, 합성곱 연산을 통해서 입력 데이터의 중요한 특징을 자동으로 추출, 이 추출된 특징을 여러 층(Layer)으로 전달하여,
시각 데이터 처리의 목표인 분류, 탐지, 세분화 등의 작업에 활용한다.
이 합성곱 연산은 아래의 이미지처럼 커널이 입력 이미지(Map) 위를 움직이며 픽셀별로 원소곱을 한 뒤 이 결과값을 모두 더하는 과정이라 볼 수 있다.
 이 합성곱을 사용하면 중요한 정보를 유지하면서, 노이즈를 줄일 수 있는 장점이 있는데
이 합성곱을 사용하면 중요한 정보를 유지하면서, 노이즈를 줄일 수 있는 장점이 있는데
이것에 대한 기본 원리는 이동 평균 필터에서 유래하였다.
1.1 이동평균 필터
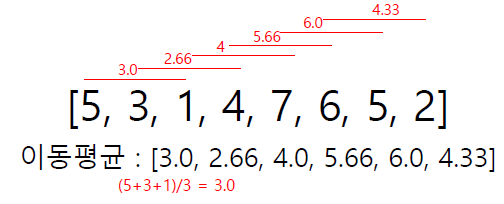 위 사진처럼 이동평균을 구현해보자
위 사진처럼 이동평균을 구현해보자
data = [5,3,1,4,7,6,5,2]
h = 3
mov_avg = [None]
#원본 데이터와 같은 길이를 갖게 하기 위하여
#시작점과 끝점에 각각 'None'를 첨가한다.
for i in range(1, len(data) -1):
cal = sum(data[i-1:i+2]) / h
mov_avg.append(round(cal, 3))
mov_avg.append(None)
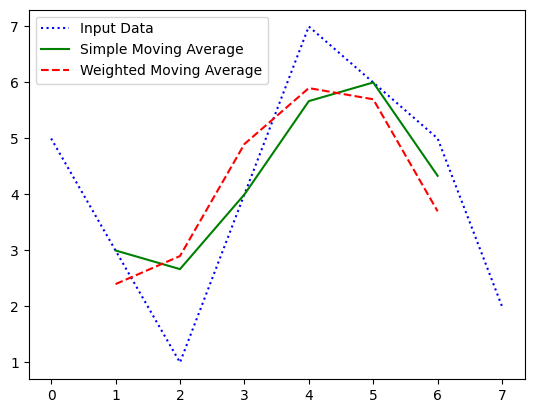
print(mov_avg) 위 코드의 출력결과는 사진과 같으며, 이를 그래프로 그리면 아래와 같다.
위 코드의 출력결과는 사진과 같으며, 이를 그래프로 그리면 아래와 같다.
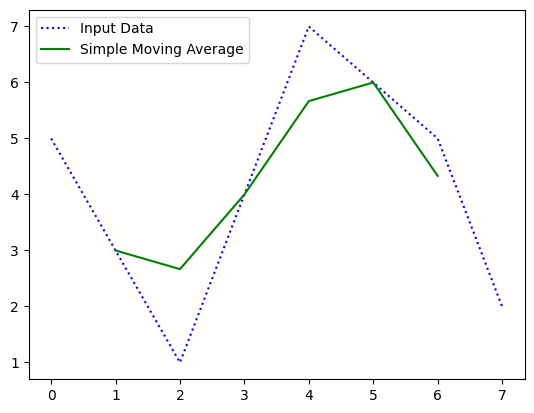 시각화 하면 더 명확하게 데이터가 갖는 패턴을 유지함을 알 수 있다.
시각화 하면 더 명확하게 데이터가 갖는 패턴을 유지함을 알 수 있다.
1.2 가중 이동평균 필터
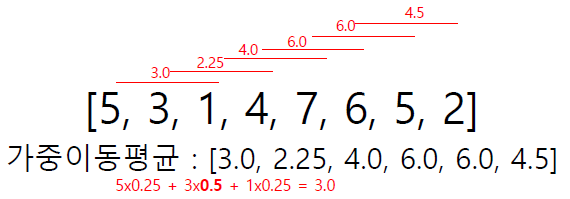 이동 평균 필터를 응용하면 위 사진처럼 최신 정보 혹은 특정 포인트에 높은 가중치를 주어 이동 평균을 구하는 가중 이동 평균 필터를 만들 수 있다.
이동 평균 필터를 응용하면 위 사진처럼 최신 정보 혹은 특정 포인트에 높은 가중치를 주어 이동 평균을 구하는 가중 이동 평균 필터를 만들 수 있다.
data = [5,3,1,4,7,6,5,2]
h = [0.2, 0.3, 0.5]
wm_avg = [None]
for i in range(1, len(data)-1):
cal = np.array(data[i-1:i+2]) * np.array(h)
wm_avg.append(round(sum(cal), 3))
wm_avg.append(None)
print(wm_avg)
위 결과를 원본, 이동평균, 가중이동평균별로 비교 분석하면 아래와 같다
여기서 h = [0.2, 0.3, 0.5]를 커널(필터)로 확장하고 신경망의 weight matrix으로 볼 수 있을 것이다.
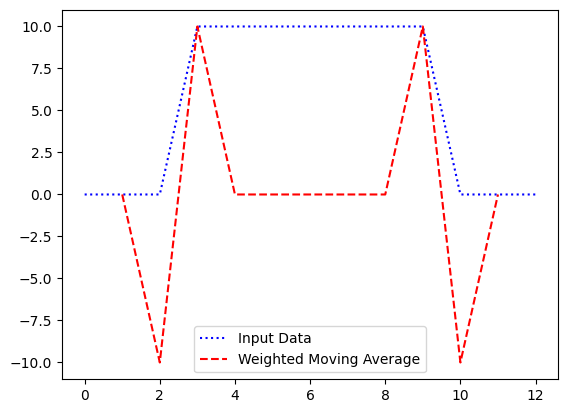
1.3 경계 찾기
이 기본적인 weight matrix로 이미지의 edge를 찾는 예제를 한번 만들어 보자
#가중평균 필터를 응용한 엣지 찾기
data = [0, 0, 0, 10, 10, 10, 10, 10, 10, 10, 0, 0, 0]
#일반적으로 'edge는 인접한 지역에서 값이
#급격하게 변하는 현상이 있다
#위 리스트에서는 3~4번, 10~11번에서
#급격한 값의 변화가 있고 여기가 edge지점이다.
h = [-1, 2, -1]
wm_avg = [None]
for i in range(1, len(data)-1):
cal = np.array(data[i-1:i+2]) * np.array(h)
wm_avg.append(round(sum(cal), 3))
wm_avg.append(None)
print(wm_avg)원본 데이터와 edge 검출을 위해 작성한 weight matrix(h)을 시각화 한다면 아래 처럼 급격한 값의 변화가 있는 지점을 쉽게 찾아낼 수 있다.
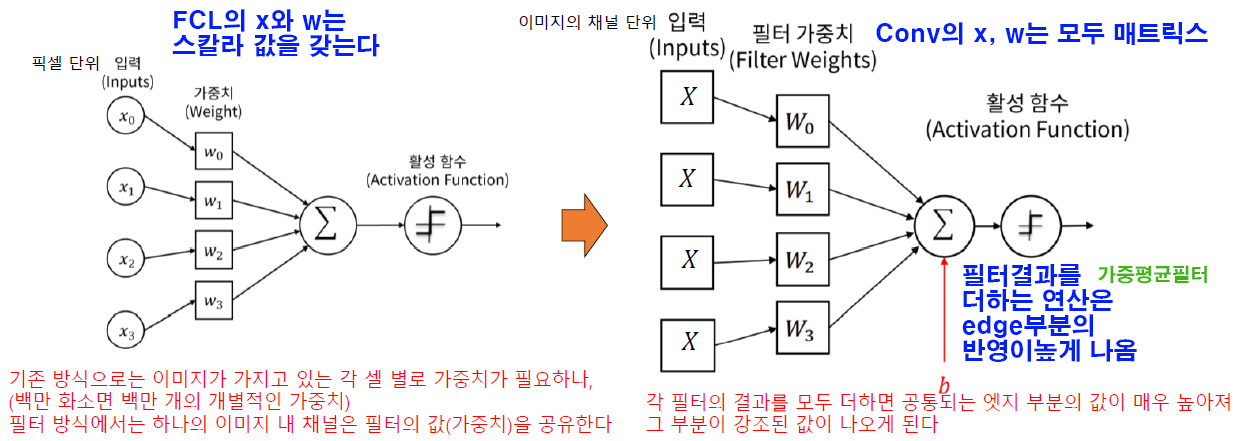
2. 이미지 합성곱
Conv Layer은 필터를 사용해 데이터의 특징을 추출하는 기능을 수행하며, 이때 이미지가 가진 지역적인 패턴을 인식 가능하기에 인식 대상 개체가 위치 및 포즈가 변화해도 인식 성능을 유지하는 장점이 있다.
이때 사용되는 이미지 필터는 입력 데이터에서 특징을 추출하기 위한 요소로써
 위 사진처럼 노란색 행렬(이미지 필터)가 이미지에서 특징을 추출해낸다.
위 사진처럼 노란색 행렬(이미지 필터)가 이미지에서 특징을 추출해낸다.
이때 이미지 필터에 적용된 가중치는 Convoled Feature를 출력하는 동안 값이 변하지 않으며(가중치 공유)
작업을 완료하고 다음 작업인 역전파 과정 때 가중치의 업데이트가 이뤄진다.
 w(필터)의 경우 초기값은 random함수로 난수가 배정되지만
w(필터)의 경우 초기값은 random함수로 난수가 배정되지만 역전파 과정을 통해 점차 loss를 0으로 수렴하게 만드는 feature map이 출력되도록 값이 업데이트 된다.
