👨🏫학습목표
오늘은 Monte Carlo method와 MC Prediction 그리고 Incremental Mean에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=eibrMjPEAMg&list=PLvbUC2Zh5oJtYXow4jawpZJ2xBel6vGhC&index=11
1️⃣ Monte Carlo method
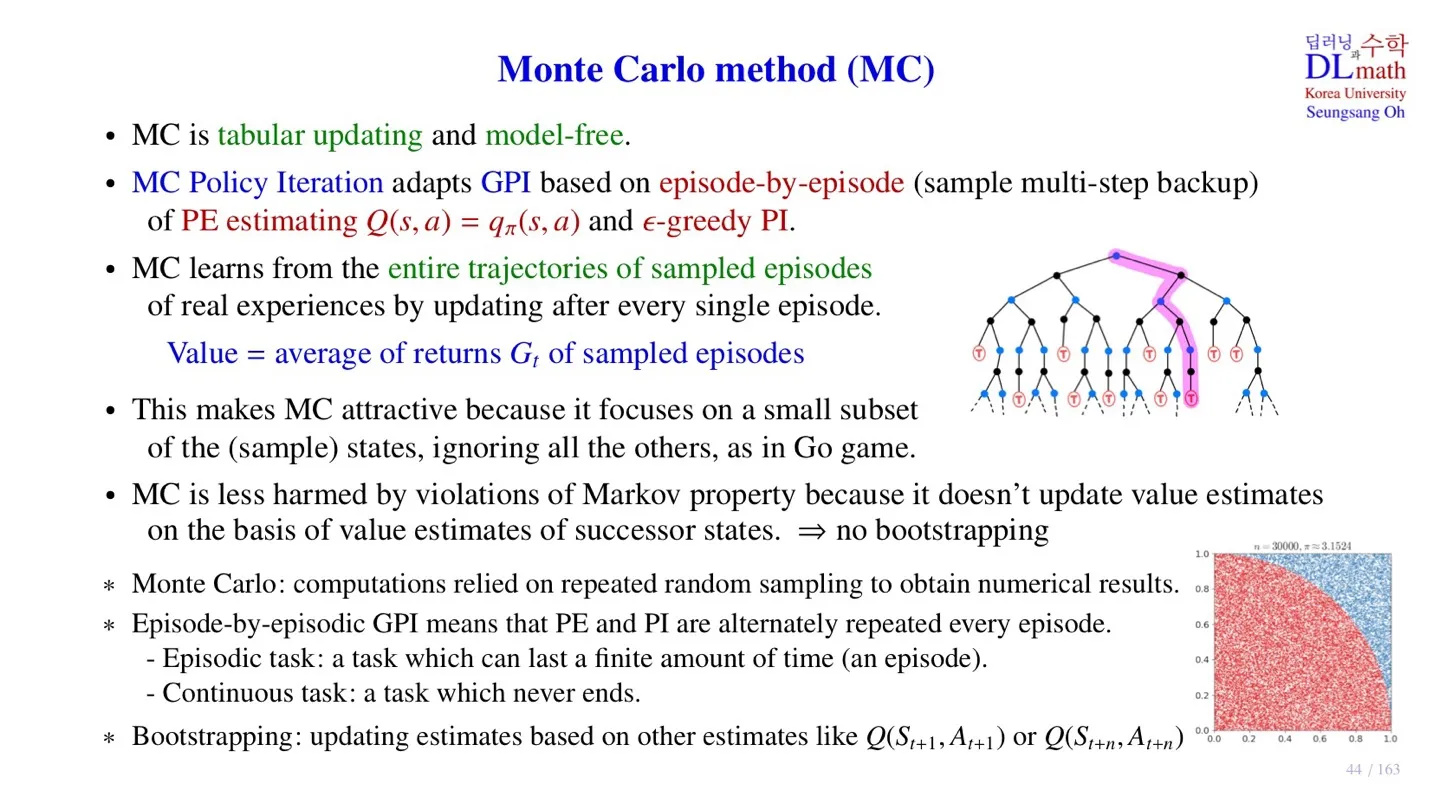
🔷 Monte Carlo
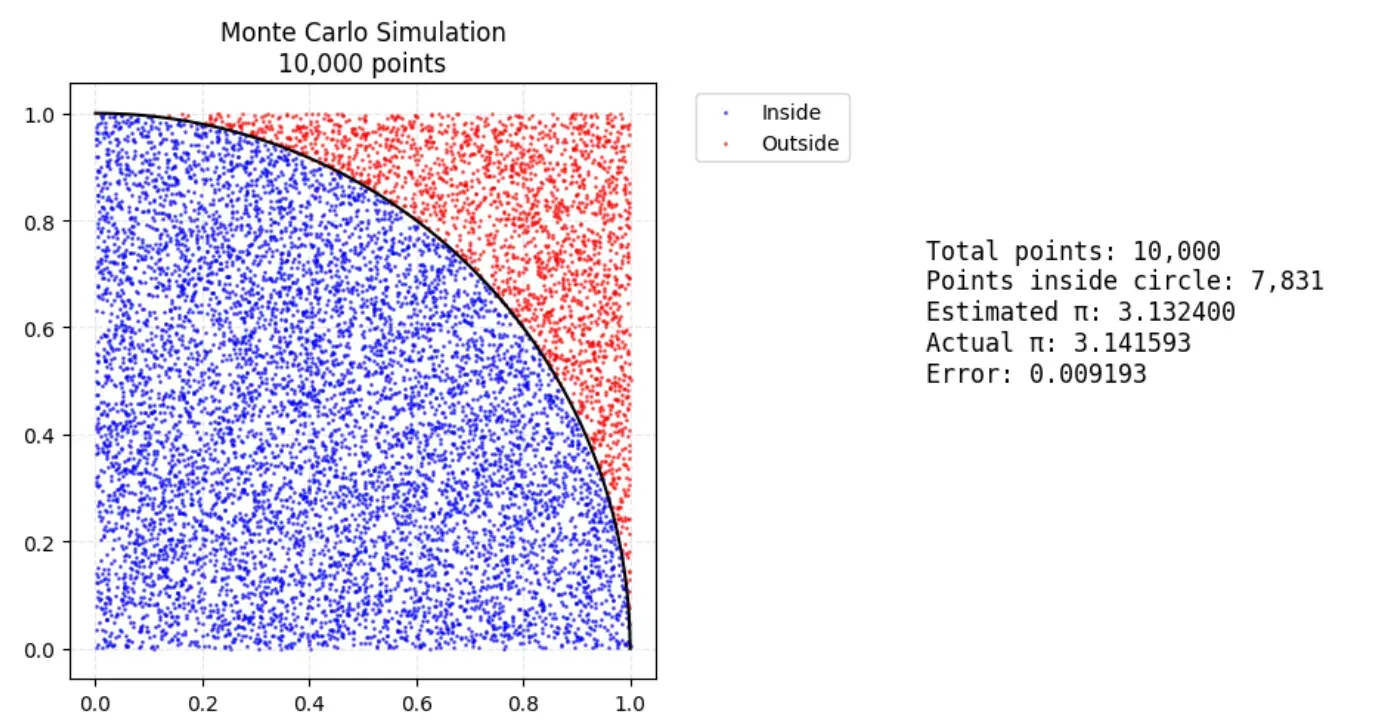
출처: https://medium.com/@miyoko_shimura/monte-carlo-simulation-using-python-random-sampling-by-calculating-π-be3cdd326361
-
Random sampling을 통해서 특정 수치적 결과를 얻는 방법이다.
-
Q-table (Action-value function table)을 사용한다.
-
MC Policy Iteration은 Episode를 하나의 단위로 하여 GPI를 수행한다.
-
하나의 sample은 하나의 episode의 끝 terminal state까지의 단계를 포함한다.
-
Sample data의 state만 고려하여 계산하기 때문에 연산량이 적다.
-
Monte Carlo는 Markov property를 일부 따르지 않더라도 큰 문제가 없다.
-
를 업데이트하기 위해서는 혹은 를 사용할 수 있는데, Monte Carlo는 를 사용하여 업데이트하기 때문이다.
-
반면, 이후에 살펴볼 Temporal Difference (TD)는 를 사용하여 를 업데이트 하기 때문에 Markov property를 따르지 않을 경우 문제가 발생한다.
2️⃣ MC Prediction
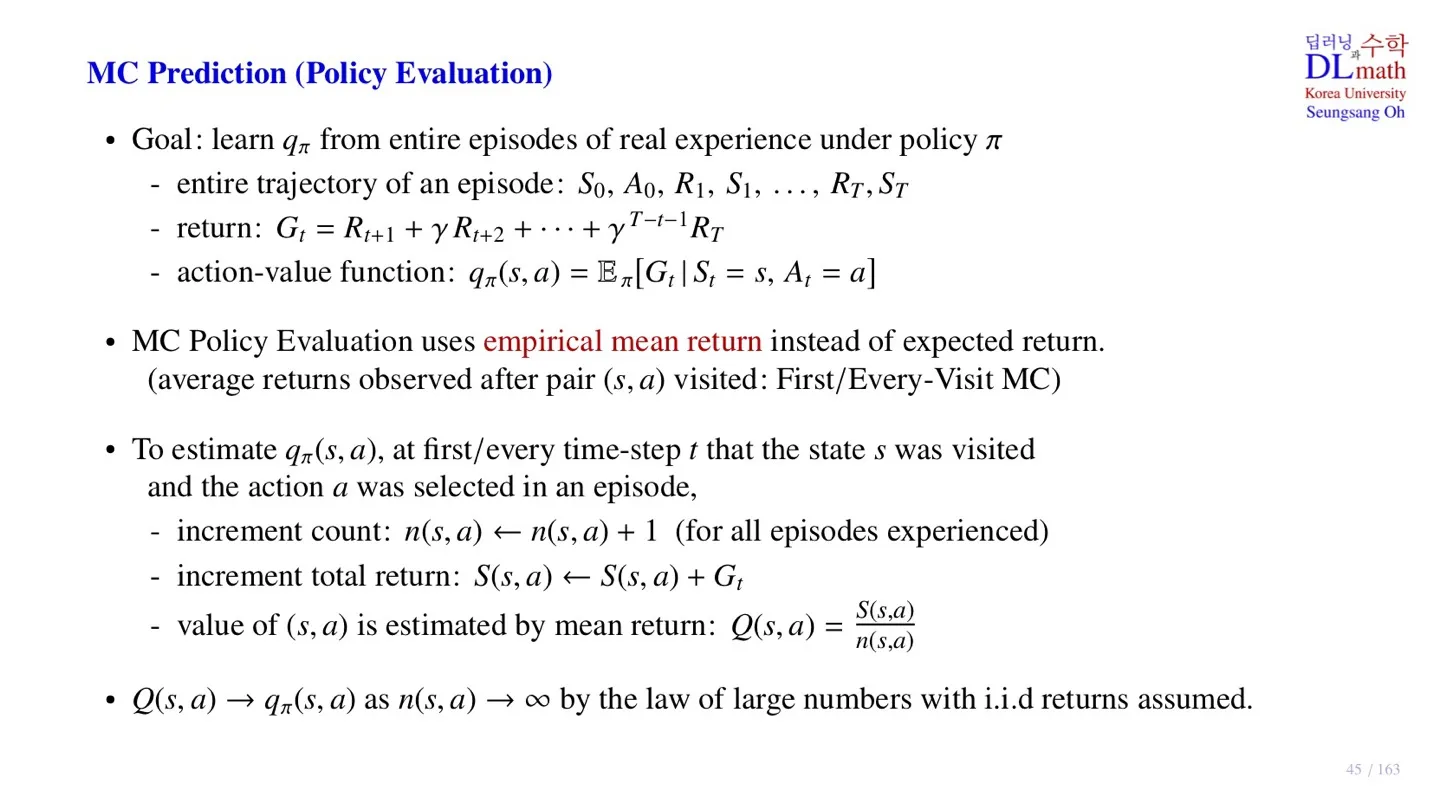
🔷 MC Prediction
-
Dynamic Programmin에서는 모든 state를 계산하기 때문에 evaluation이라는 표현이 적합하지만, Monte Carlo에서는 sample data만으로 추정을 하기 때문에 prediction이라는 표현이 더 적합하다.
-
목표: 현재 policy에서 model이 경험을 통해 하나의 episode sample을 수집한 후, 해당 정보를 이용하여 를 구하는 것이다.
-
Episode 정보:
-
Return:
-
Action-value function:
❗ 여기서 잠깐
Monte Carlo는 sample을 이용하여 계산하기 때문에 기대값을 구할 수 없다. 따라서 하나의 시나리오에 대한 sample들의 의 평균을 대신 사용한다.
또한 하나의 시나리오 안에서도 동일한 쌍이 나타날 수 있다. 첫 번째 쌍만 사용할지, 모든 쌍을 사용할지에 따라 First-Visit MC와 Every-Visit MC로 나뉜다.
-
각 state-action 쌍에 대한 return의 평균을 구할 때, 각 return이 서로 독립이고, sample의 수가 충분히 크다면 큰 수의 법칙에 따라 를 만족한다.
-
이러한 각 를 계산하는 과정을 조금 더 간단하게 만든 것이 Incremental mean이다.
3️⃣ Incremental Mean
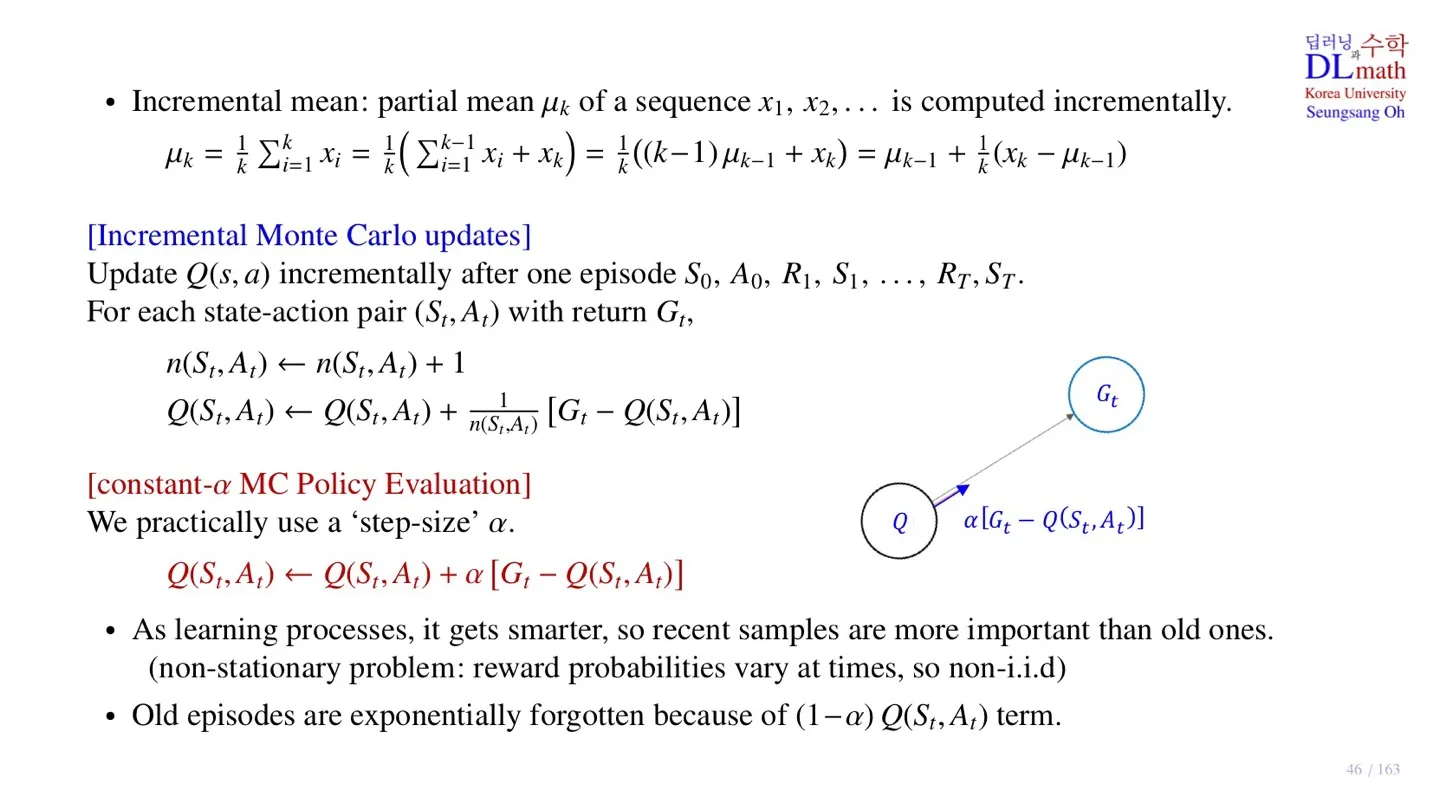
🔷 Incremental mean
- 정리하면 아래와 같다.
🔷 Incremental Monte Carlo updates
- Episode 정보:
-
모든 를 기억할 필요 없이 이전 와 새로운 에 대한 정보만 알고 있으면 된다.
-
그런데 Reinforcement Learning에서 model은 시간이 지날수록 성능이 개선된다.
-
따라서 미래에 얻게 되는 Return 가 더 중요하다는 의미이기도 한다.
-
하지만 현재 방식은 모든 시간의 를 동등한 중요도로 보고 평균을 구하는 방식이다.
-
이러한 한계를 극복하기 위해 새로운 방식이 등장한다.
🔷 Constanst - MC Policy Evaluation
-
대신 상수 를 사용한다.
-
를 사용하게 되면 최근의 Return 를 더 많이 반영하는 효과가 나타한다.
-
또한 를 계속 연산하지 않기 때문에 연산량이 감소한다.
-
또한 model의 성능은 계속해서 좋아지기 때문에 는 엄밀하게 보면 를 만족하지 않는다.
-
식을 정리하면 아래와 같다.
- Old episode를 만큼 감소시키는 효과가 있다.
4️⃣ 정리
🔷 11강에서 배운 내용은 아래와 같다.
- Monte Carlo method에 대해 배웠다.
- MC Prediction 단계에서 를 추정하는 방법을 살펴보았다.
- Incremental Monte Carlo를 배웠다.
- 최근의 Return 를 더 많이 반영하는 Constanst - MC Policy Evaluation를 살펴보았다.
