👨🏫학습목표
오늘은 Asynchronous Advantage Actor-Critic에서 Advantage를 사용하는 이유, pseudo code, A2C에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=spAnltgCRY8
1️⃣ Advantage
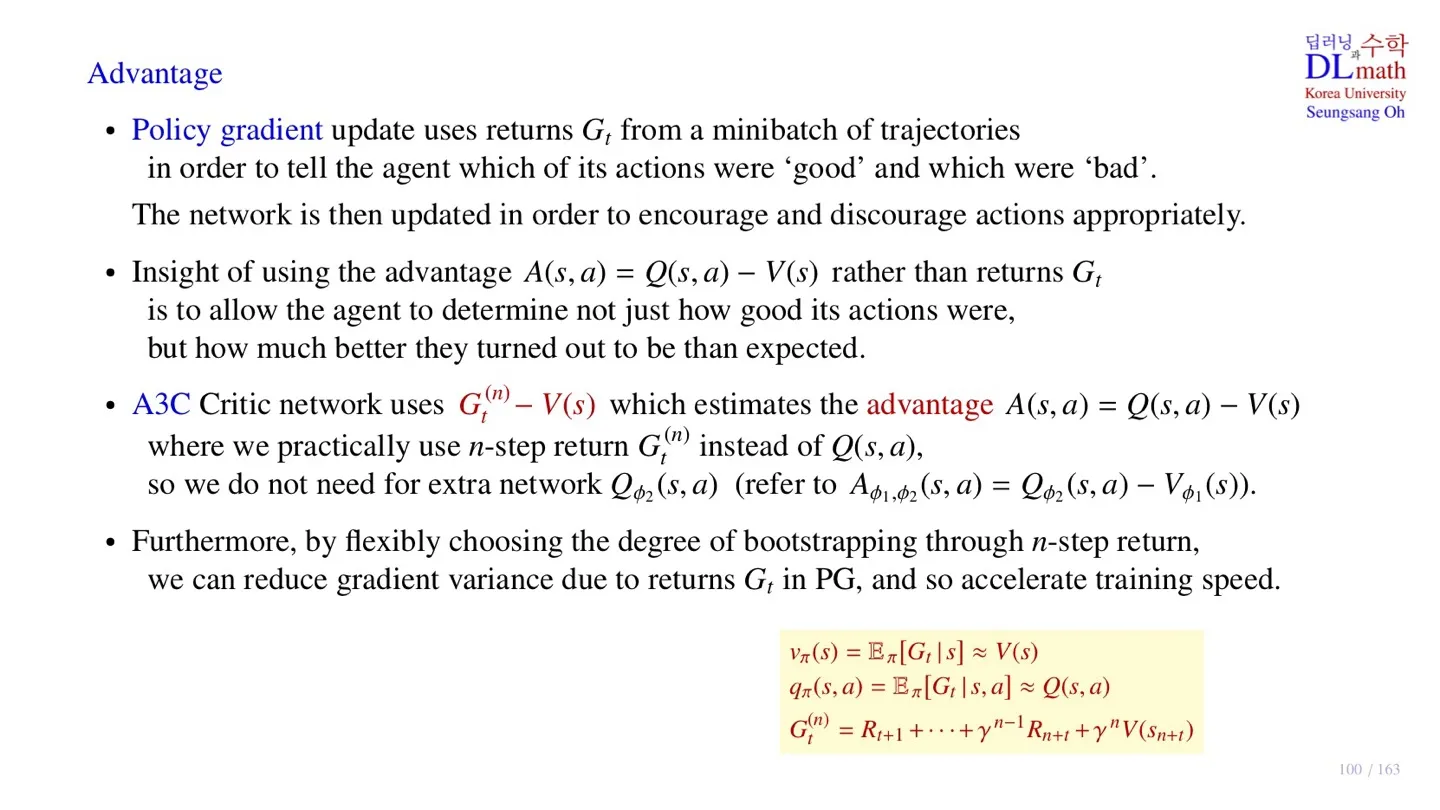
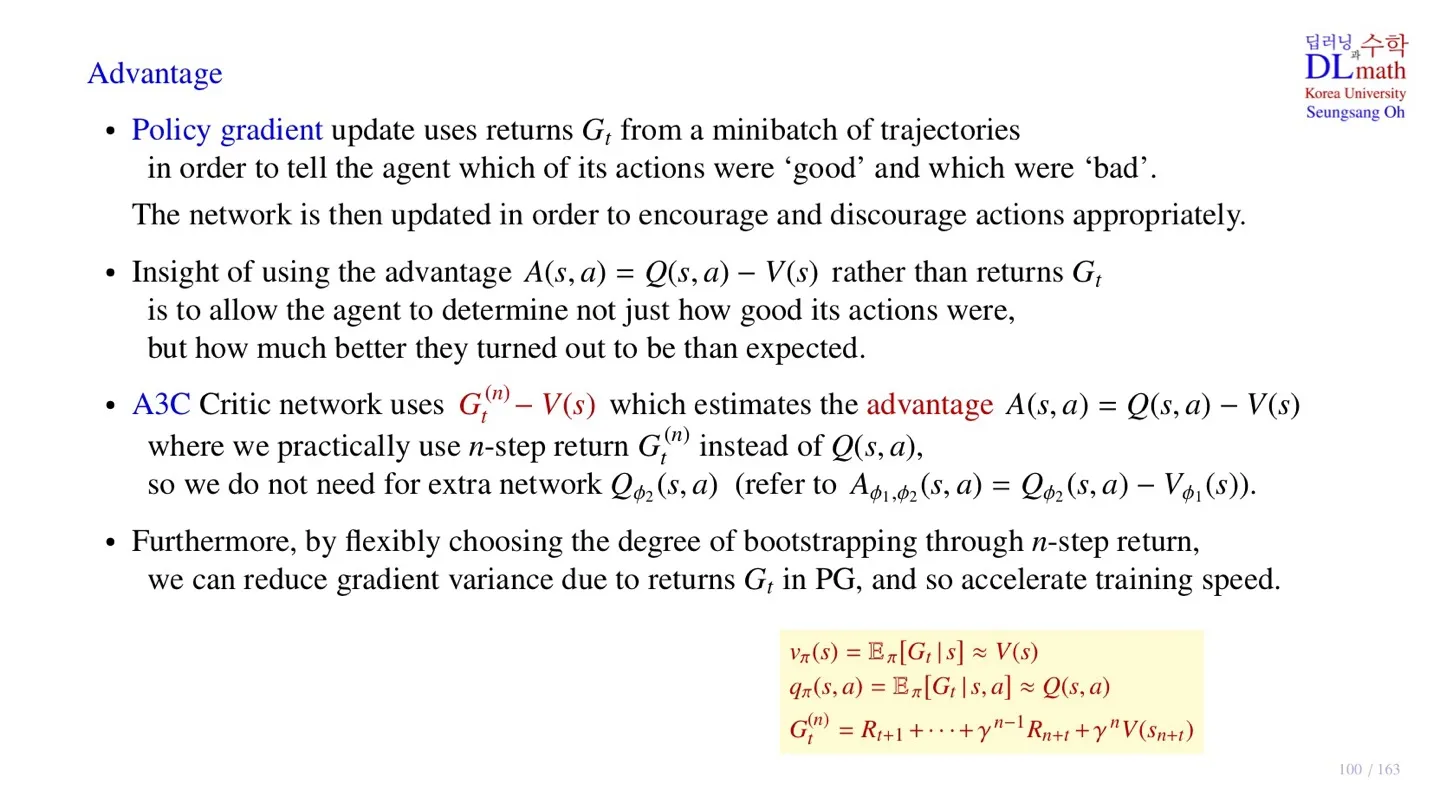
🔷 Policy gradient
- Total reward의 expectation을 object function로 사용
- 하지만 실제로는 total reward 대신 return 사용
- 의 크기만큼 해당 action 방향으로 업데이트를 진행한다.
🔷 Advantage
-
-
Return 대신 Advantage fucntion 를 사용하면 어떨까?
-
의 의미 : 현재 state에서 해당 action을 취했을 때 앞으로 얻게 될 return의 기대값
-
의 의미 : 현재 state에서 모든 action에 대한 return의 기대값이다.
-
는 현재 state에서 주어진 action을 선택했을 때 얻는 기대 return이 평균적인 기대 return보다 얼마나 더 좋은지를 나타낸다.
-
만약 이면, 해당 action은 평균보다 더 좋은 action이다.
-
만약 이면, 해당 action은 평균보다 더 나쁜 action이다.
🔻 Advantage의 한계
- Advantage를 사용하려면 와 모두 알아야 한다.
- 이를 위해서는 2개의 Network가 필요한다.
🔻 A3C의 선택
- 이러한 한계를 극복하기 위해 A3C에서는 대신 n-step return 을 사용한다.
- n-step return 은 모델이 수집한 trajectory를 통해 구한다.
- n값이 커질수록 원래 return 에 가까워진다. 그와 함께 gradient variance가 커진다.
- 반대로 n값이 작아질수록 gradient variance가 줄어들어 학습속도가 빨라지는 효과가 있다.
2️⃣ A3C pseudo code
🔷 파라미터 정리
🔻 Model parameter
- Global Network의 Actor parameter
- Global Network의 Critic parameter
- Worker Agent의 Actor parameter
- Worker Agent의 Critic parameter
🔻 Accumulated gradient
- agent actor의 accumulated gradient
- agent critic의 accumulated gradient
🔷 Gradient 구하기
🔻 가중치 초기화
- Global Network의 파라미터를 copy하여 Worker Agent의 파라미터로 가져온다.
🔻 sample data 수집
- Policy 를 통해 action을 선택한다.
- 해당 action을 통해 을 얻는다.
- 이 과정을 step 동안 반복하여 길이가 인 trajectory segment를 얻는다.
🔻 Accumulated gradient 연산
🔸 Agent Actor Network
🔸 Agent Critic Network
🔸 Agent Actor Network
- Actor Network를 업데이트하기 위해서는 Actor Network 와 Critic Network 를 모두 활용한다.
- 이때 은 으로 연산된다.
🔸 Agent Critic Network
- Critic Network를 업데이트하기 위해서는 Critic Network 를 활용한다.
- 이때 은 으로 연산된다.
🔷 파라미터 업데이트
- 계산한 Accumulated gradient를 통해 Global Network의 파라미터를 업데이트한다.
- Actor Network 는 gradient ascent로 업데이트한다.
- Critic Network 는 gradient descent로 업데이트한다.
3️⃣ A2C
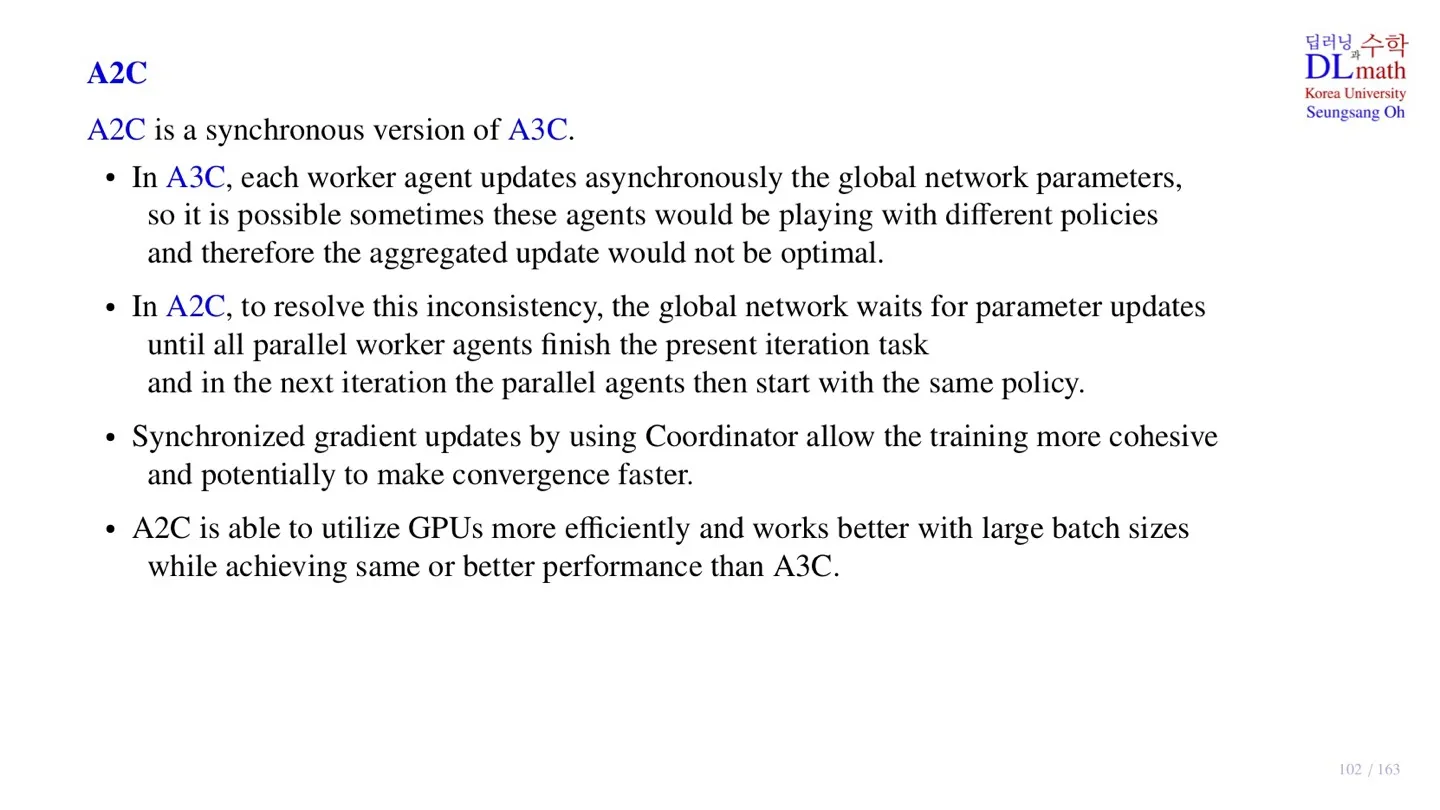
🔷 A2C
- A3C에서 Asynchronous를 synchronous로 바꿔주었다.
- Advantage Actor Critic이다.
🔻 AC3
- 각 Worker Agent가 asynchronous하게 Global Network를 업데이트한다.
- 각 Worker Agent는 다른 policy를 가지고 학습을 시작한다.
- 이러한 상황은 Global Network가 optimal하지 않도록 학습할 수 있다.
🔻 A2C
- 각 Worker Agent가 학습을 마친 후 함께 Global Network를 업데이트한다.
- 각 Worker Agent가 동일한 파라미터를 copy한다. 즉 동일한 policy를 사용한다.
- 이러한 과정을 제어해주는 장치를 Coordinator라고 한다.
- A2C는 synchronous하게 학습하는 방식을 통해 조금 더 cohesive한 학습을 할 수 있다.
- 또한 동일한 policy에 대해 학습을 수행하기 때문에 convergence 속도가 더 빠르다.
- A2C는 A3C보다 GPU를 더 효율적으로 사용하며, batch size가 커질수록 더 효율적인 데이터 처리가 가능하다는 특징이 있다.
4️⃣ 정리
🔷 25강에서 배운 내용은 아래와 같다.
- Asychronous Advantage Actor-critic은 advantage function을 사용하지만, 실제 연산에서는 n-step retrun 을 통해 를 대체한다.
- A3C는 step 동안 업데이트를 진행하면서 여러 n-step return 를 사용한다.
- A2C는 A3C가 optimal한 학습을 할 수 없다는 한계를 극복하기 위해 등장하였다.
- A2C는 각 agent가 동일한 policy를 통해 학습을 진행한다.

I'm curious about AI