👨🏫학습목표
오늘은 TRPO의 개념과 TRPO의 object function에 대해 배워볼 예정이다.
1️⃣ Trust Region Policy Optimization
📕 지난시간에 배운 내용 DDPG
- Continuous action space를 다루기 위해서 deterministic policy μ(s)를 사용한다.
- 하지만 monotonically improve가 되지 않는다.
🔷 TRPO
- DDPG의 한계를 극복하기 위해 TRPO는 2가지 개념을 채택한다.
- 첫 번째는 Minorization-Maximization algorithm이다.
- 두 번째는 Trust region이다.
- TRPO는 policy parameter를 trust region에서 업데이트한다.
- Trust region은 KL-divergence를 제약조건으로 만든다.
- Trust region에서의 parameter 업데이트는 expected return의 monotonic improvement를 보장한다.
- Monotonic improvement가 보장되어 step size에 대해 고민할 필요가 없다.
🔻 TRPO의 특징
- TRPO는 등장 논문에서 이론적으로 정립되었지만, 실제로 적용하는 것에는 어려움이 있었다.
- 따라서 논문의 저자는 여러 approximation을 통해 TRPO를 구현하였다.
- TRPO는 좋은 성능을 발휘하지만, Network의 scale이 커지면 구현하는 데 어려움이 있다.
- 이미지 데이터는 CNN을, sequential data는 RNN을 사용하지만 Network의 크기가 너무 커지면 안된다.
2️⃣ Trust Region에 대한 Intuition
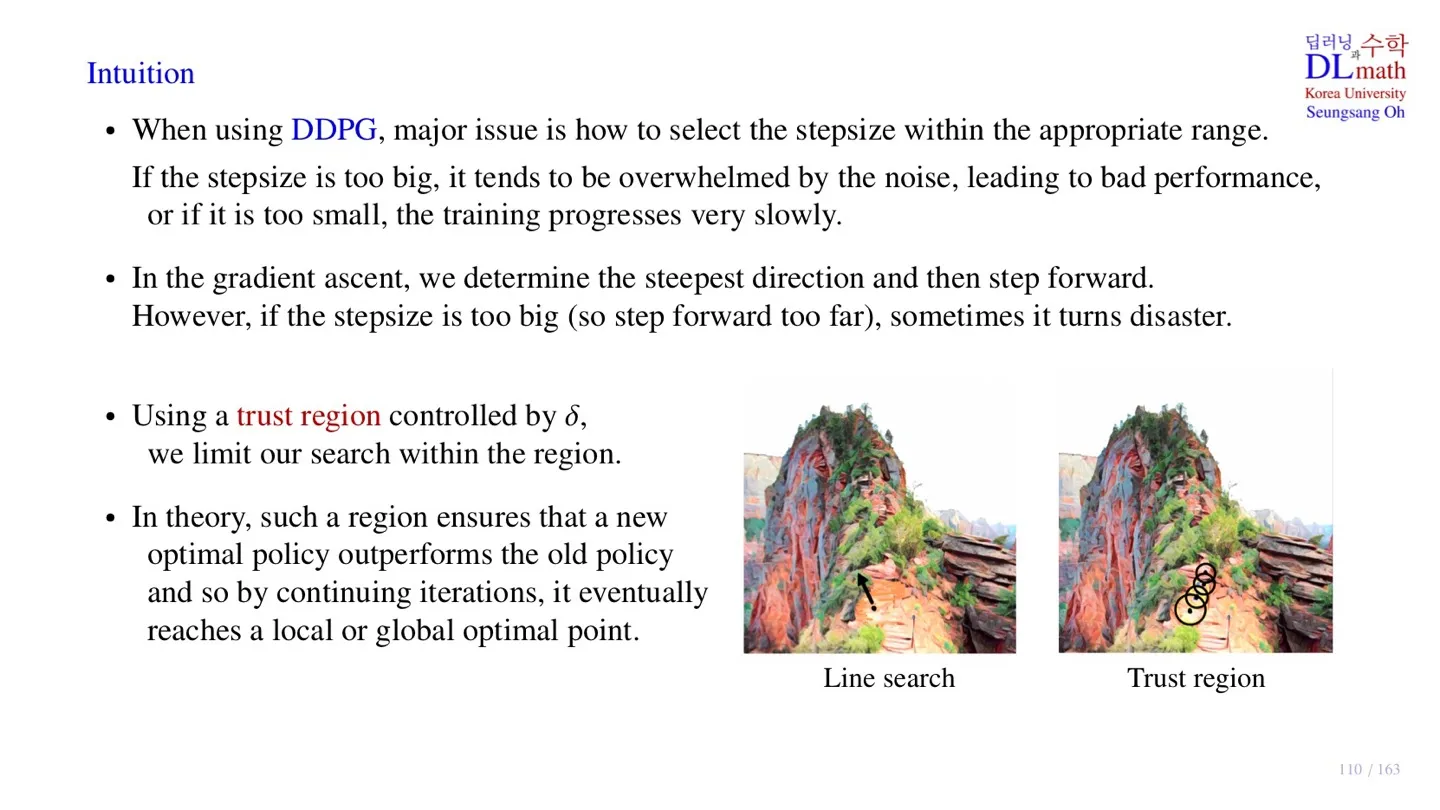
🔷 Trust Region 사용 이유
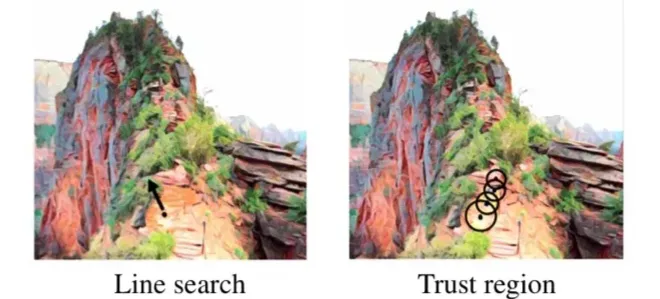
- 목표는 산 정상에 가는 것이다. 이는 Object function을 최대화하는 것과 같다.
- 왼쪽 그림에서 언덕을 올라가기 위해 gradient를 계산하면 가장 경사가 높은 방향으로 이동할 것이다.
- 하지만 너무 많이 이동하게 되면 낭떨어지로 떨어질 수도 있다.
- 오른쪽 그림처럼 이동을 해도 안전하고 올라간다는 보장이 있는 영역을 만든다면 이동 보폭과 관계없이 편하게 이동할 수 있다.
🔻 TRPO의 한계 다시 정리
- Object function을 maximize하는 방향을 알지만 step size를 알 수 없다.
- Step size가 너무 클 경우 성능이 떨어지는 문제가 존재한다.
- Step size를 작게 하면 안전할 수 있지만, 학습 속도가 느려진다.
🔷 TRPO의 Trust Region
- δ를 이용하여 trust region의 크기를 조절한다.
- Trust region 안에서 new optimal policy를 찾게 되면 이전 policy보다 성능이 더 좋다.
- Trust region에서 optimal policy를 찾는 과정을 반복하면 global or local policy에 도달할 수 있다.
- TRPO에서 가장 중요한 것을 trust region을 찾는 것이다.
3️⃣ TRPO의 Object function 1
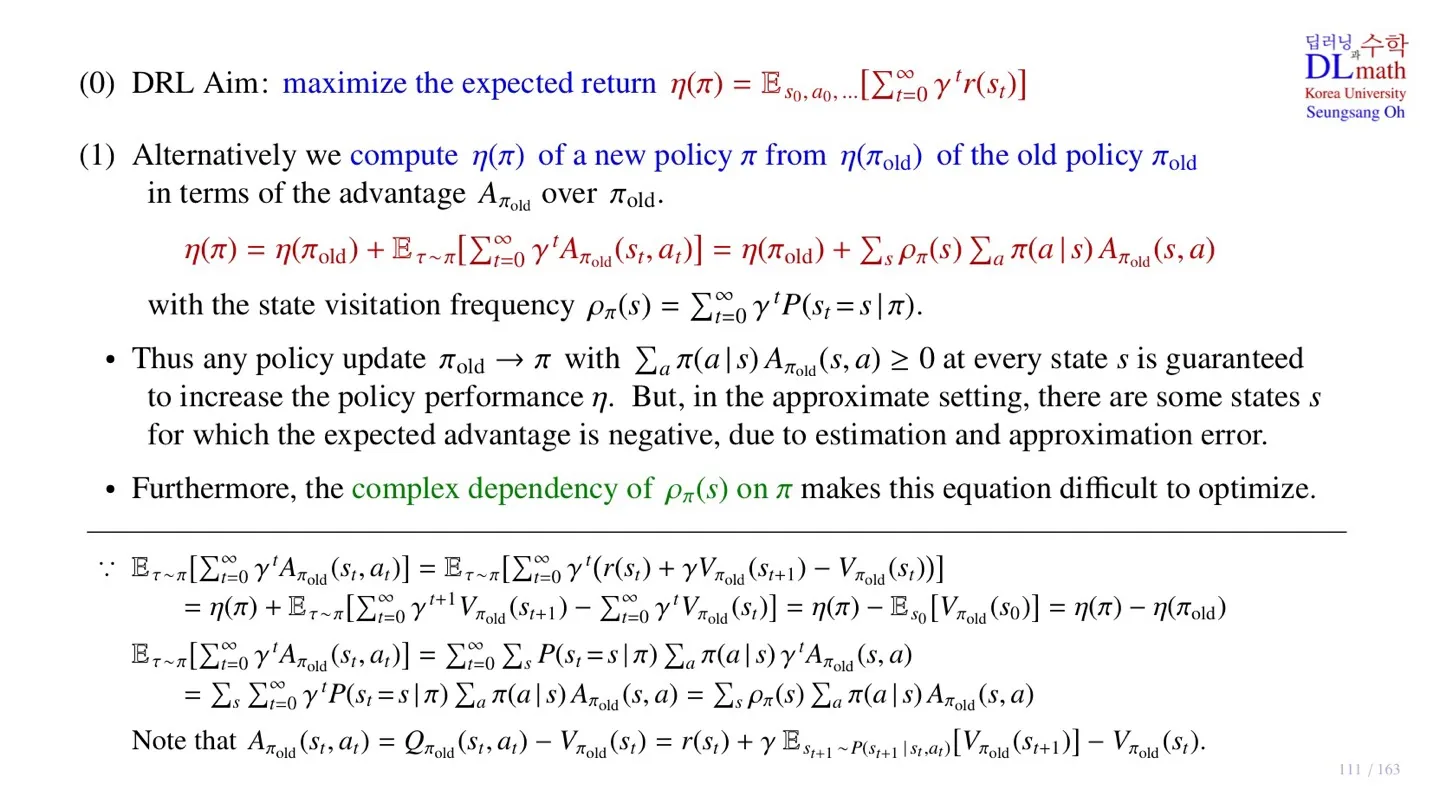
🔷 Object function
η(π)=Es0,a0,…[t=0∑∞γtr(st)]
- 현재 주어진 policy π를 통해 episode 데이터를 수집한다.
- 수집한 데이터를 통해 구한 expected return을 object function으로 한다.
- Object function을 maximize하는 방향으로 policy를 업데이트한다.
🔷 Object function 구하기
- 업데이트된 policy의 η(π)를 구하기 위해서 기존의 policy πold의 η(πold) 값을 활용한다.
η(π)=η(πold)+Eτ∼π[t=0∑∞γtAπold(st,at)]
η(πold)+Eτ∼π[t=0∑∞γtAπold(st,at)]=η(πold)+s∑ρπ(s)a∑π(a∣s)Aπold(s,a)
- 각 식에서 우변의 2번째 항에 대해 집중해서 살펴볼 필요가 있다.
🔻 첫 번째 등호 증명하기
Eτ∼π[t=0∑∞γtAπold(st,at)]=Eτ∼π[t=0∑∞γt(r(st)+γVπold(st+1)−Vπold(st))]
- 좌변의 Advantage function Aπold(st,at)는 r(st)+γVπold(st+1)−Vπold(st)로 바꿀 수 있다.
Eτ∼π[t=0∑∞γt(r(st)+γVπold(st+1)−Vπold(st))]
Eτ∼π[t=0∑∞γt(r(st)]=η(π)
- Eτ∼π 속 첫 번째 항은 Object function으로 바꿀 수 있다.
Eτ∼π[t=0∑∞γt(r(st)+γVπold(st+1)−Vπold(st))]=η(π)+Eτ∼π[t=0∑∞γt+1Vπold(st+1)−t=0∑∞γtVπold(st)]
- 따라서 위 식으로 변환이 가능하다.
- 이때 ∑t=0∞γt+1Vπold(st+1)−∑t=0∞γtVπold(st)값은 t가 증가함에 따라 서로 상쇄되는 것을 확인할 수 있다.
η(π)+Eτ∼π[t=0∑∞γt+1Vπold(st+1)−t=0∑∞γtVπold(st)]=η(π)−Es0[Vπold(s0)]
η(π)−Es0[Vπold(s0)]=η(π)−η(πold)
- Es0 는 모든 state를 시작 지점으로 얻을 수 있는 return의 expectation을 의미하는데, 이는 정의에 따라 η(πold)로 바꿀 수 있다.
Eτ∼π[t=0∑∞γtAπold(st,at)]=η(π)−η(πold)
- 따라서 위 식이 성립하므로 첫 번째 등호가 성립한다.
🔻 두 번째 등호 증명하기
ρπ(s)=t=0∑∞γtP(st=s∣π)
- ρπ(s)는 state visitation frequency를 의미한다.
η(πold)+Eτ∼π[t=0∑∞γtAπold(st,at)]=η(πold)+s∑ρπ(s)a∑π(a∣s)Aπold(s,a)
Eτ∼π[t=0∑∞γtAπold(st,at)]=t=0∑∞s∑P(st=s∣π)a∑π(a∣s)γtAπold(s,a)
- Eτ∼π ,∑t=0∞ 의 순서를 바꿀 수 있다.
- Eτ∼π 은 ∑sP(st=s∣π)∑aπ(a∣s) 로 풀어서 적을 수 있다.
=s∑t=0∑∞γtP(St=s∣π)a∑π(a∣s)Aπold(s,a)=s∑ρπ(s)a∑π(a∣s)Aπold(s,a)
- ∑t=0∞ 에 대한 순서를 바꿔주면 최종적으로 ρπ(s)를 구할 수 있다.
Eτ∼π[t=0∑∞γtAπold(st,at)]=s∑ρπ(s)a∑π(a∣s)Aπold(s,a)
- 따라서 위 식이 성립하므로 두 번째 등호가 만족한다
🔻 Object function 이해하기
η(π)=η(πold)+s∑ρπ(s)a∑π(a∣s)Aπold(s,a)
- New policy의 η(π)를 구하기 위해서 η(πold)에 2번째 항을 더한다.
🔷 Objection function의 optimize
η(π)=η(πold)+s∑ρπ(s)a∑π(a∣s)Aπold(s,a)
- 위 식을 통해 object function을 maximize하기 위해서는 η(π)≥η(πold)가 보장되어야 한다.
- ρπ(s)≥0: ρπ(s)은 확률값이기 때문에 0보다 크다.
- 따라서 ∑aπ(a∣s)Aπold(s,a)≥0 를 만족하면 object function을 업데이트 할수록 성능이 개선됨을 증명할 수 있다.
🔻 한계
- 하지만 간혹 ∑aπ(a∣s)Aπold(s,a)≤0 인 경우가 존재하여 아직까지 성능이 계속 향상됨을 증명할 수 없다.
- 또한 ρπ(s)를 구하기 위해서 new policy π의 sample state를 수집해야 하는데, 아직까지 new policy를 구하는 과정이기 때문에 실제로 sample state를 수집할 수 없다.
- 따라서 위 식에 있는 new policy를 old policy πold 로 바꿔야 한다.
- 이 과정이 첫 번째 approximation이다.
4️⃣ TRPO의 Object function 2
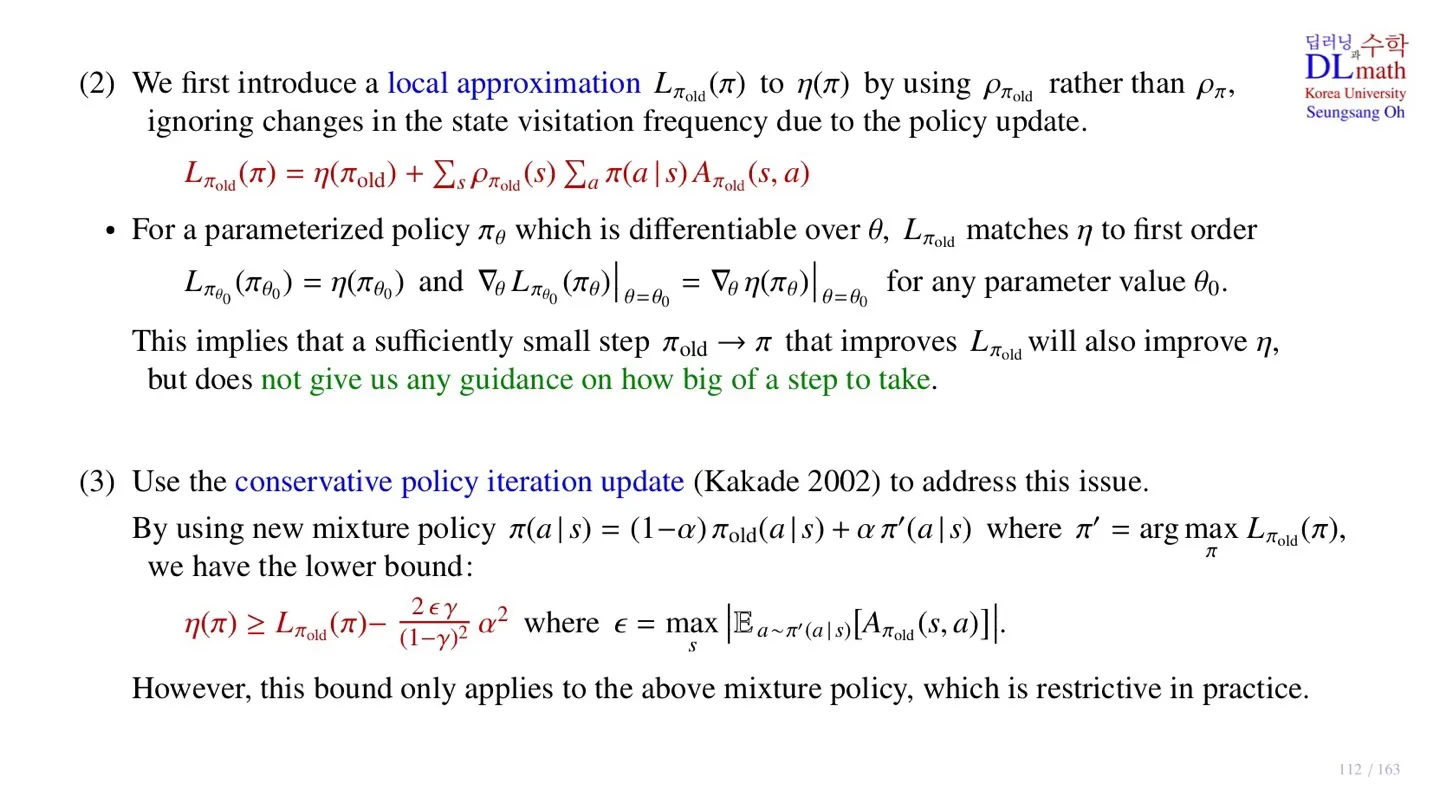
🔷 Object function approximation
Lπold(π)=η(πold)+s∑ρπold(s)a∑π(a∣s)Aπold(s,a)
- Lπold(π): 근사한 Object function
- 기존 식의 ρπ(s)를 ρπold(s)으로 변환한 것을 확인할 수 있다.
🔻 그래프로 확인
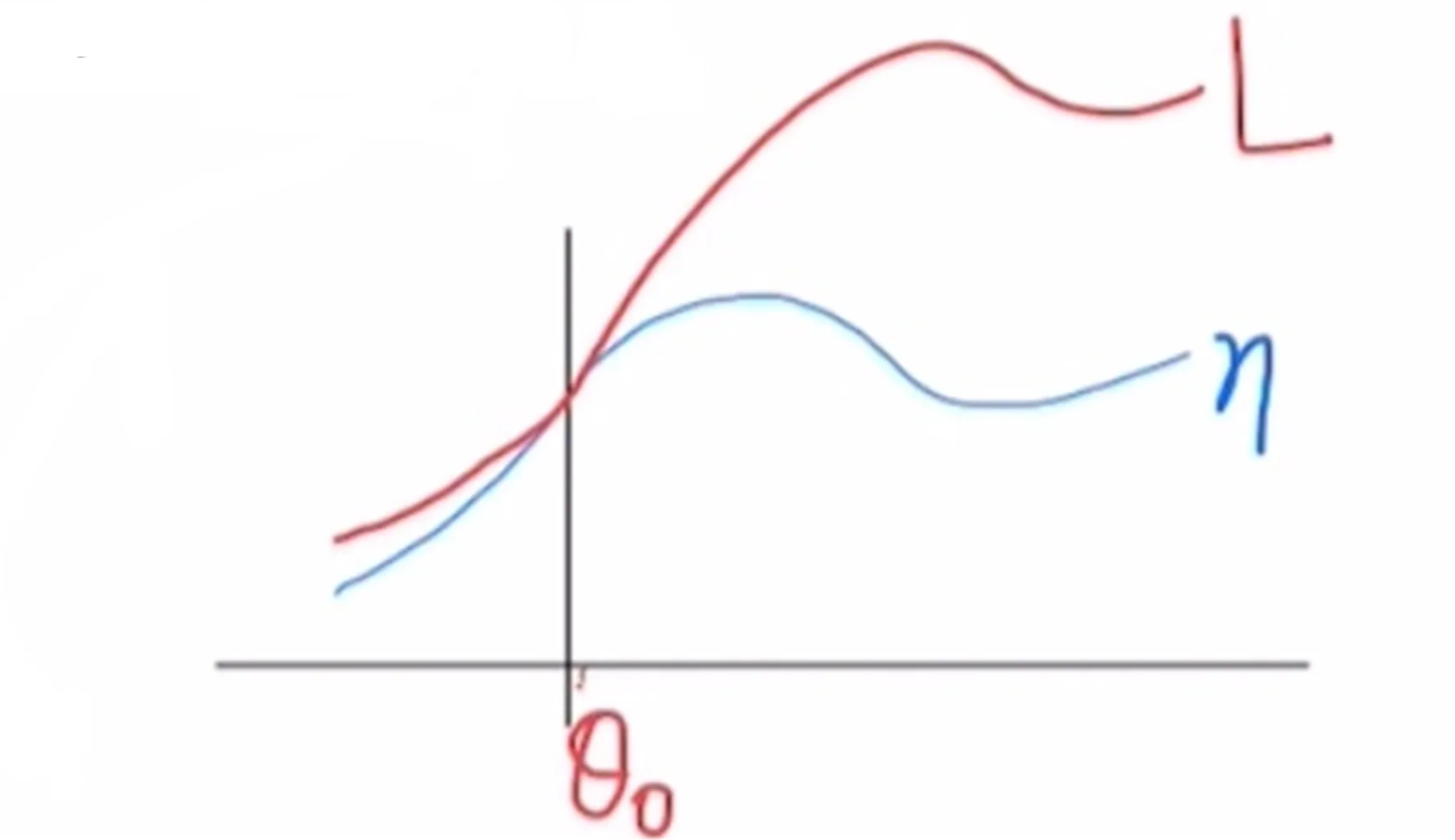
- 근사를 할 경우 그림처럼 표현할 수 있다.
- Old policy πold의 파라미터를 θ0라 할 때, 원래 식과 근사한 식이 θ0에서 유사한 것을 확인할 수 있다.
- Old policy πold와 new policy π가 local한 영역에서 유사하게 움직인다.
🔻 수식으로 확인
Lπθ0(πθ0)=η(πθ0) for any parameter value θ0.
🔸 위 식에 성립하는 이유
Lπold(π)=η(πold)+s∑ρπold(s)a∑π(a∣s)Aπold(s,a)
- 위 식의 좌변에서 π자리에 πθ0를 넣게 되면 우변 2번째 항의 π(a∣s)가 πold(a∣s)가 된다.
- 그 결과 ∑aπold(a∣s)Aπold(s,a)가 만들어지는데 ∑aπold(a∣s)Aπold(s,a)=0이 성립한다.
- 따라서 위 식이 유도된다.
∇θLπθ0(πθ0)∣θ=θ0=∇θη(πθ)∣θ=θ0 for any parameter value θ0.
- Gradient가 유사하기 때문에 근사식이 improve되는 방향에서 기존의 식 역시 improve될 수 있음을 알 수 있다.
- 다만 근사한 영역의 크기를 알 수는 없기에 step size에 대한 정보는 알 수 없다.
- 이를 해결하기 위해 여러 단계를 다룬다.
🔷 Conservative policy iteration update
π(a∣s)=(1−α)πold(a∣s)+απ′(a∣s) where π′=argπmaxLπold(π)
- Conservative policy iteration update는 근사식 Lπold(π)을 최적화시킨 후 그 값을 Old policy πold에 일부만 반영하는 방법이다.
η(π)≥Lπold(π)−(1−γ)22ϵγα2 where ϵ=smax∣Ea∼π′(a∣s)[Aπold(s,a)]∣
- Conservative policy iteration update을 사용하면 업데이트된 policy가 lower bound를 가진다.
- α값이 커질수록 lower bound가 낮아진다.
- Discount factor γ가 1에 가까워질수록 lower bound가 낮아진다.
- 하지만 ϵ 값을 구하는 것은 쉽지 않다.
- 또한 mixture policy라는 개념 역시 아직까지 practical하게 적용하기는 쉽지 않다.
5️⃣ 정리
🔷 27강에서 배운 내용은 아래와 같다.
- TRPO는 DDPG가 monotinic하게 improve되지 않는다는 한계를 극복하기 위해 등장하였다.
- TRPO는 Trust region과 Minorization-Maximization algorithm이 사용된 모델이다.
- TRPO는 expected return을 object function으로 사용한다.
- TRPO의 object function을 구하기 위해서는 여러 approximation을 거쳐야 한다.
- Conservative policy iteration update는 lower bound를 보장하지만 구현하기가 어렵다.
