👨🏫학습목표
오늘은 TRPO의 파라미터를 업데이트하기 위한 Natural Gradient Policy에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=Q3_mJFKiEwc&t=1060s
0️⃣ TRPO
📕 지난시간에 배운 내용
- TRPO는 모델의 성능을 monotonic하게 향상시키는 것에 초점을 맞춘 모델이다.
- 이를 위해서 Minorization-Maximization algorithm과 Trust region 개념을 사용한다.
- Trust region 안에서 MM-algorith을 사용하면 expected return의 monotonic improvement가 보장된다
- 그 결과 step size에 대해서는 크게 고려하지 않아도 된다.
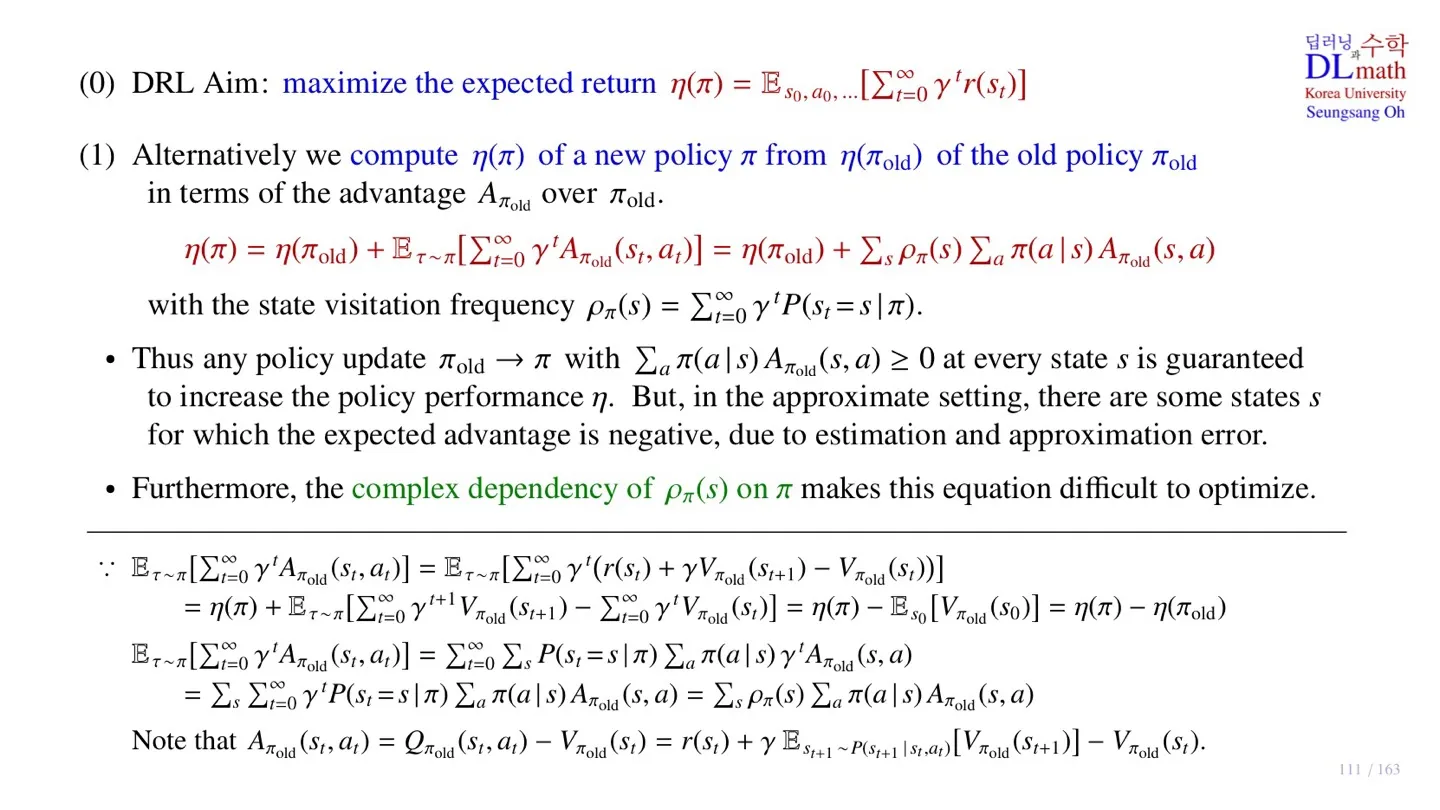
1️⃣ TRPO의 object function
📕 지난시간에 배운 내용
- Expected return을 object function으로 사용한다.
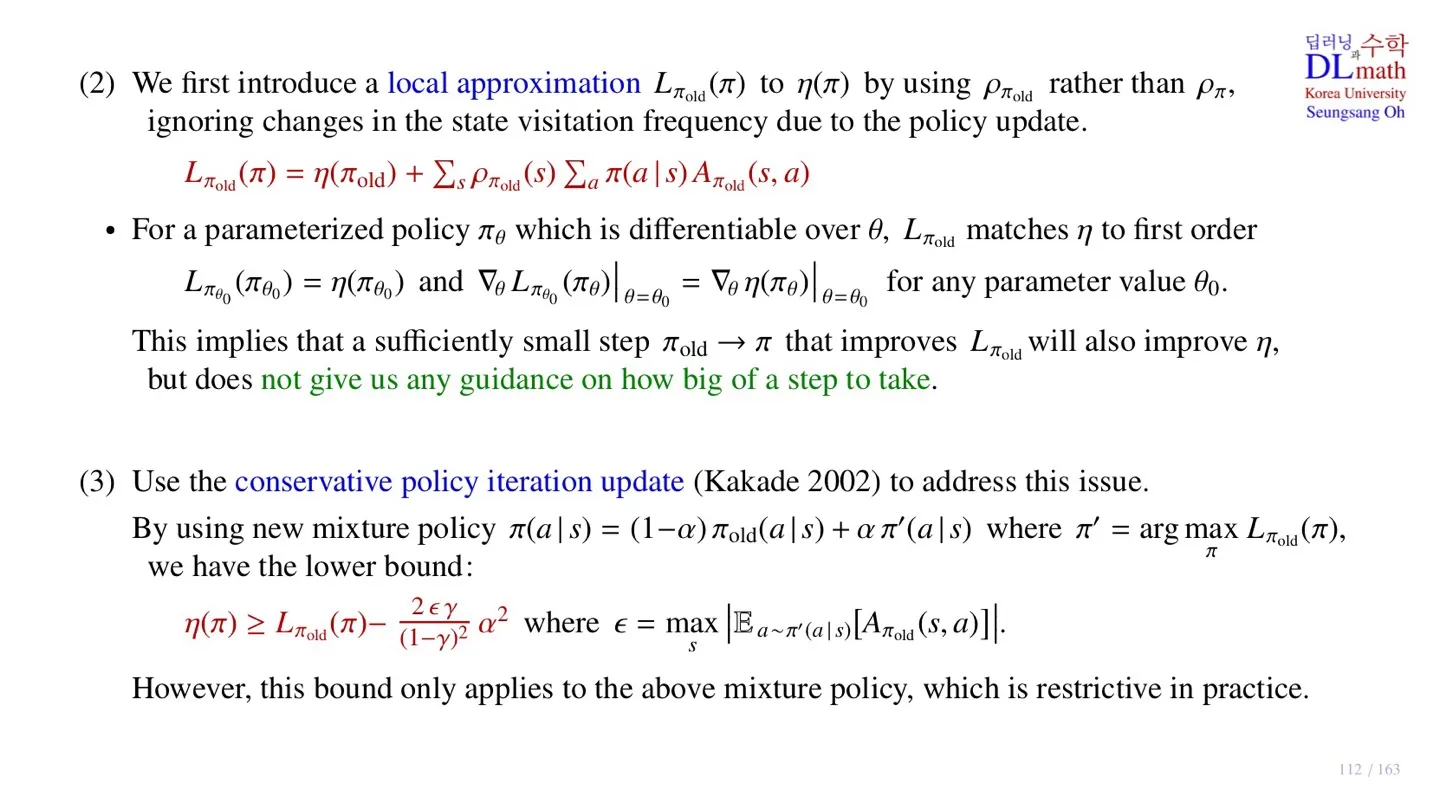
2️⃣ Object function의 Lower bound
📕 지난시간에 배운 내용
- 여러 approximation을 통해 object function의 lower bound를 찾는다.
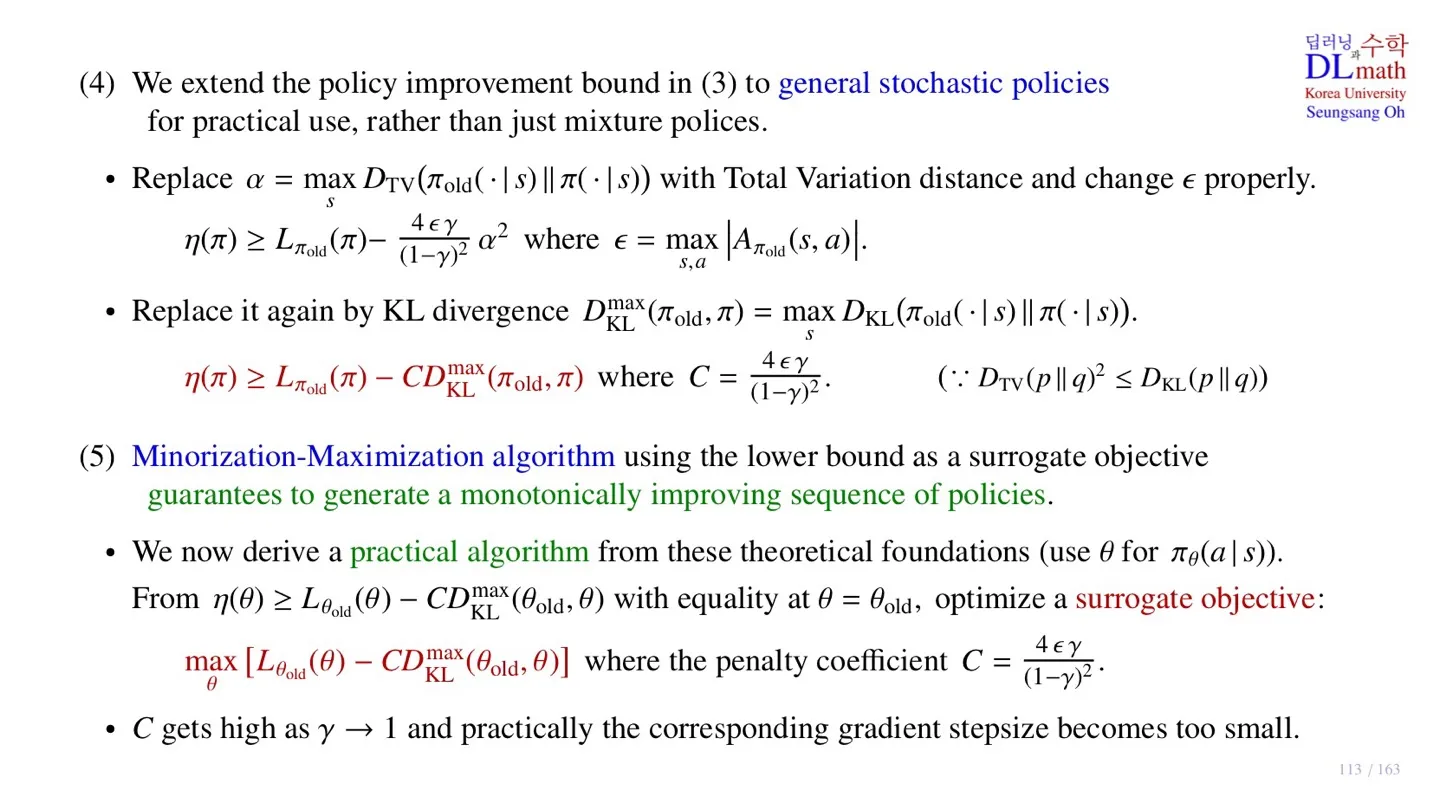
3️⃣ MM-algorithm
📕 지난시간에 배운 내용
- MM-algorithm은 lower bound를 사용하여 object function의 monotonic improvement를 보장한다.
- MM-algorithm에서 lower bound를 surrogate objective function으로 사용한다.
- MM-algorithm에서 surrogate objective function을 maximize하는 파라미터를 찾는다.
- 해당 파라미터를 new policy로 업데이트한다.
- 이 과정을 반복하여 Object function의 optimal policy에 도달한다.
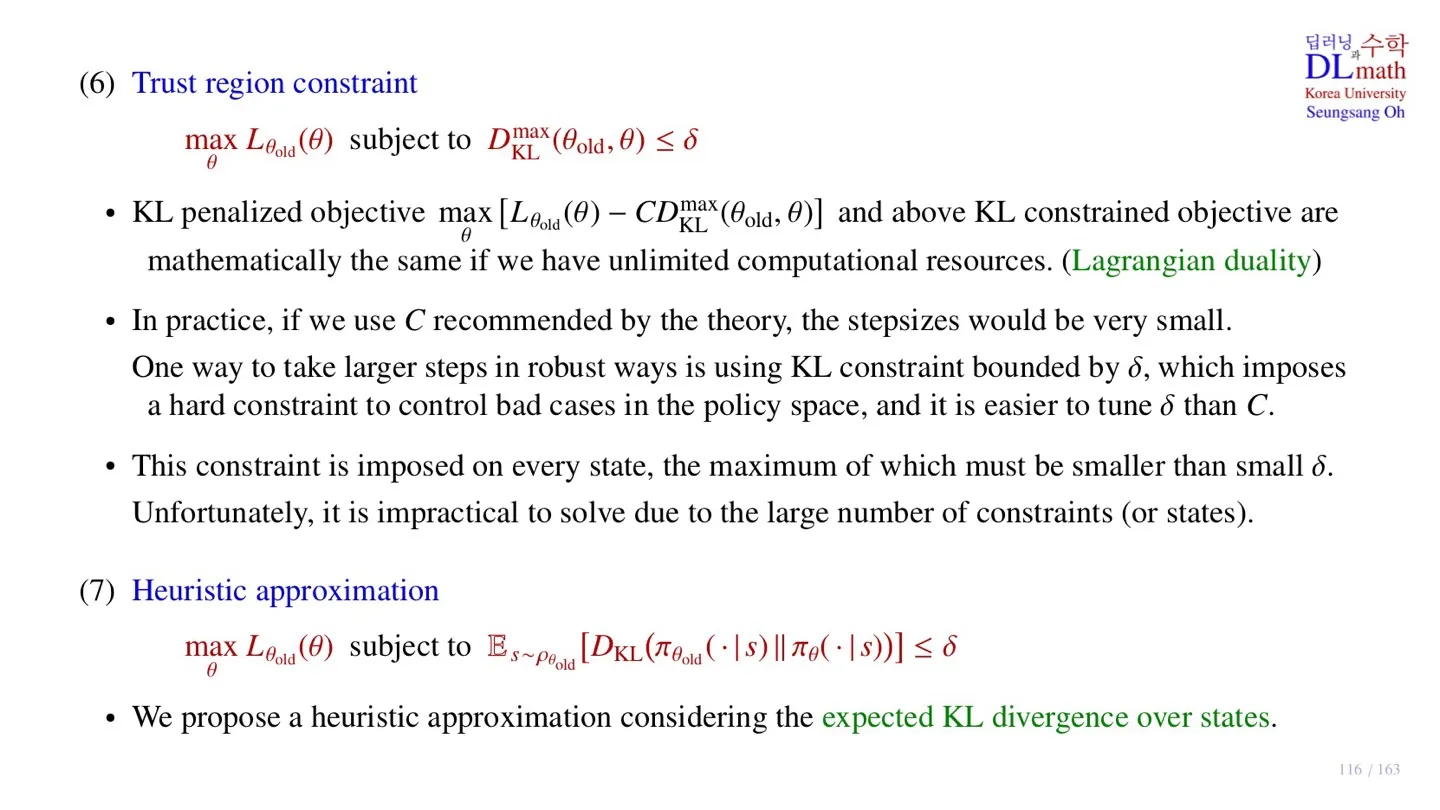
4️⃣ Constraint object
📕 지난시간에 배운 내용
- KL penalized objective 항을 제약조건 식으로 바꾸었다.
- Constraint 항을 trust region이라고 한다.
- Trust region 항에 Monte Carlo simulation을 적용하기 위해 max값을 expectation으로 바꾸었다.
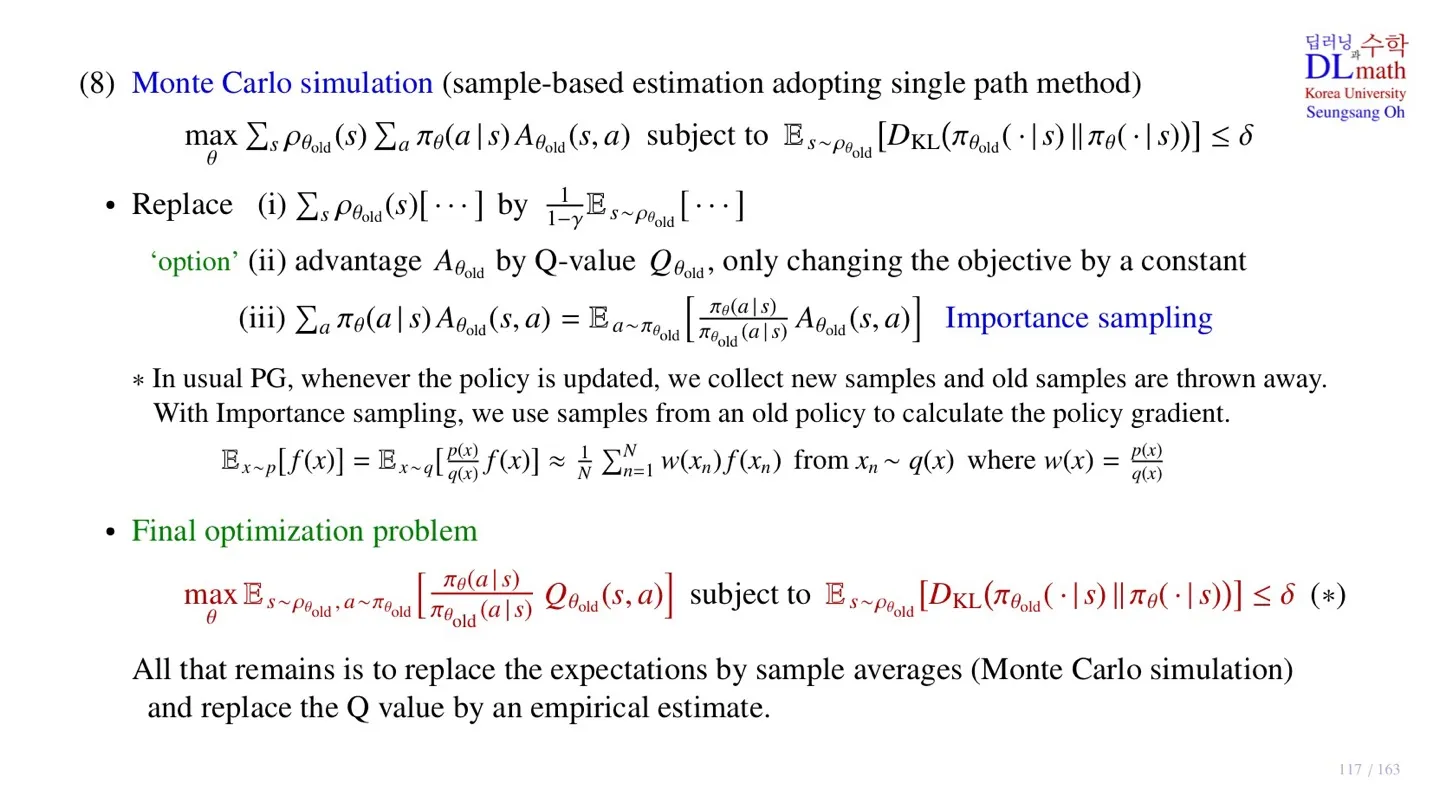
5️⃣ Monte Carlo simulation
📕 지난시간에 배운 내용
- 최종적으로 위 식이 도출된다.
- Expectation을 old policy로 sampling하여 구할 수 있다.
- Expectation 대신 sample averages를 사용한다.
- Q-value값은 Q-Network를 설계하여 구한다.
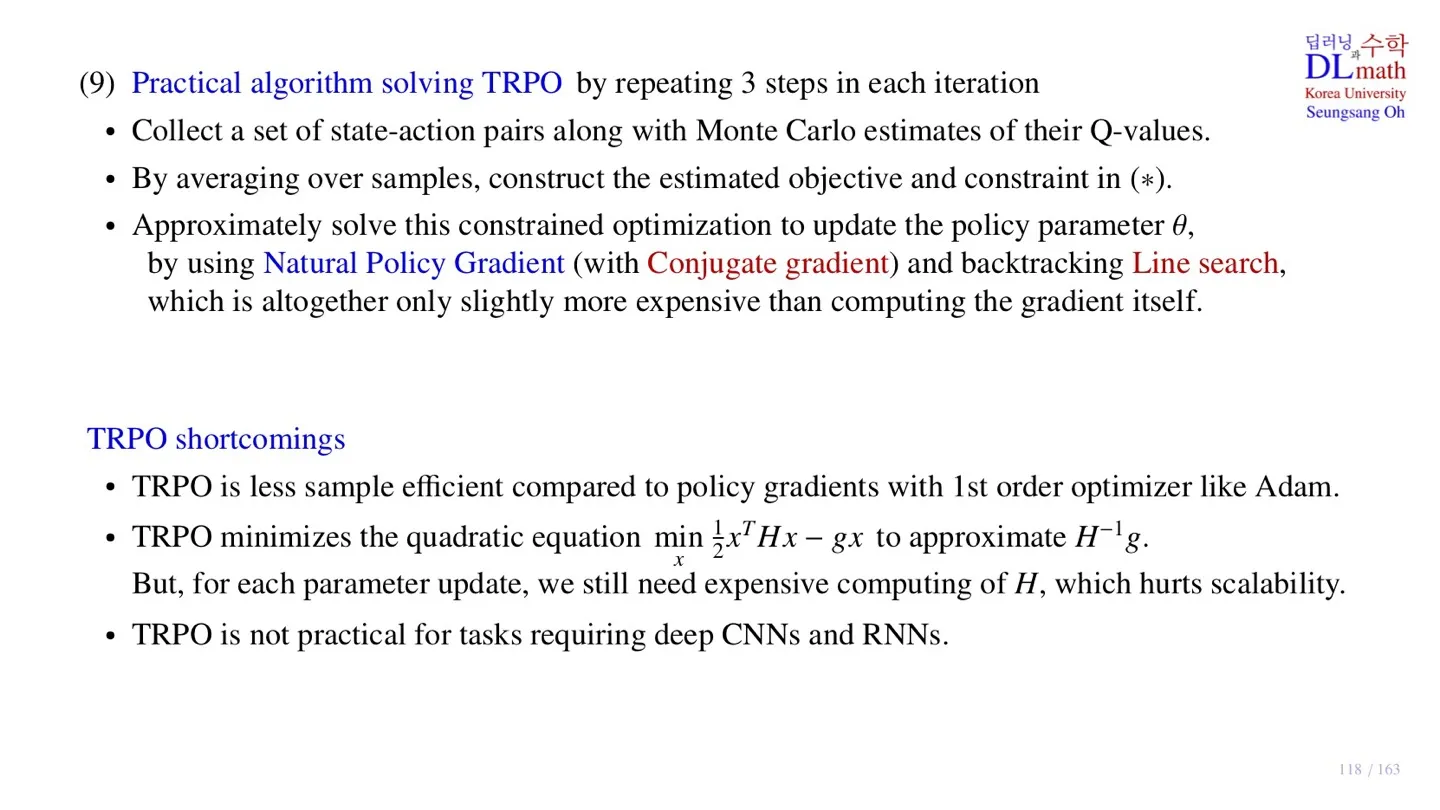
6️⃣ Practical algorithm
📕 지난시간에 배운 내용
- Sample data를 수집하고 Q-Network를 이용하여 Q-value값을 구한다.
- Sample data를 통해 expectation 값을 구한다.
- Natural Policy Gradient를 이용하여 파라미터를 업데이트한다.
7️⃣ Natural Policy Gradient
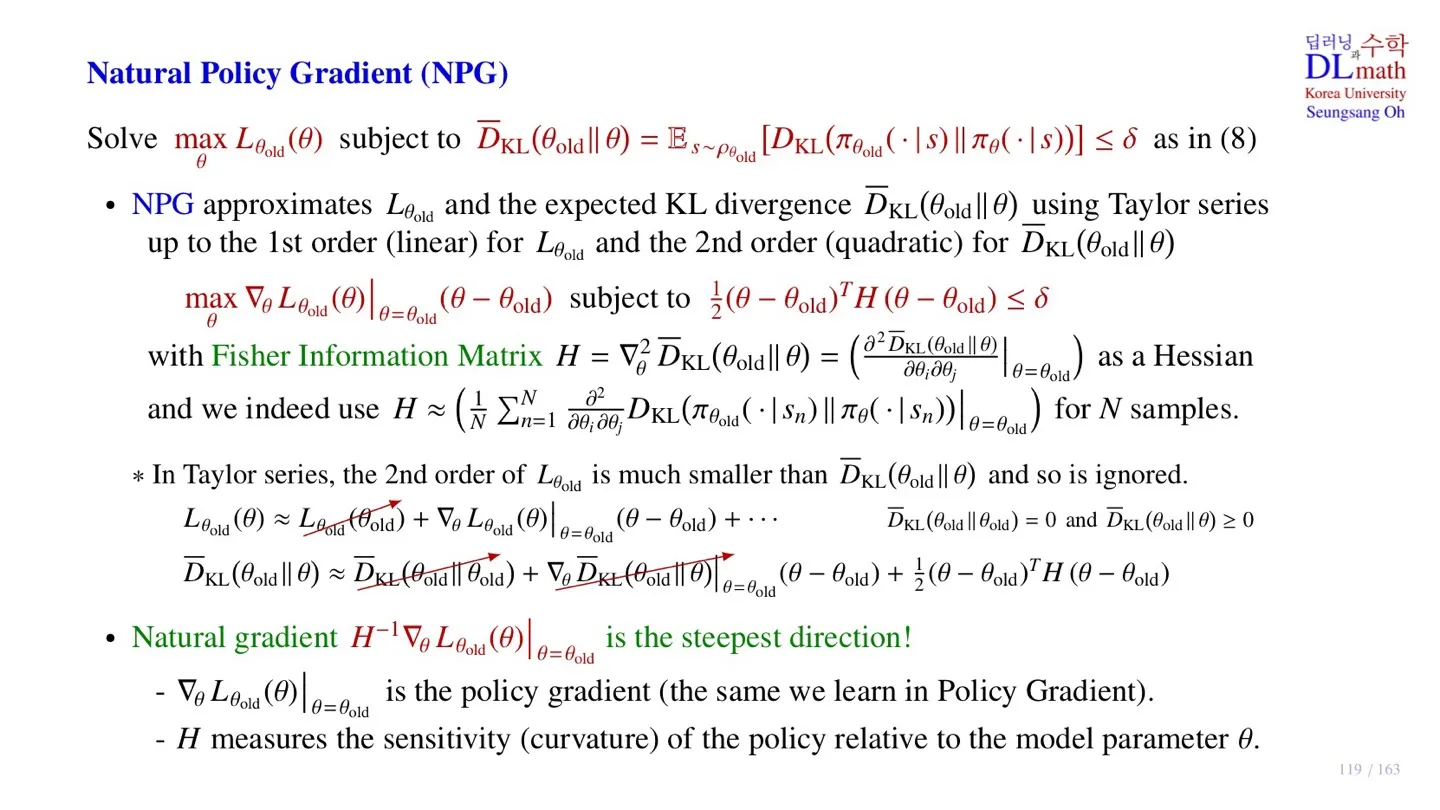
🔷 Tayor series를 통한 approximation
- NPG는 Objective function과 Constraint 식을 모두 Taylor series를 통해 근사한다.
- Objective function은 1차식만 근사한다.
- 1차식에는 1번 미분하여 사용된 gradient가 존재한다.
- Constraint 식은 2차식만 근사한다.
- 2차식에는 2번 미분하여 사용된 Hessian이 존재한다.
- Hessian은 2번 미분된 행렬이기 때문에 더 많은 연산량을 필요로 한다.
- Step size는 Constraint 식을 만족하는 범위 내에서 결정해야 한다.
- 현재 사용된 Hessian 를 Fisher Information Matrix라고 한다.
- 실제 모델에 적용할 때는 Minibatch sample data를 사용하여 그 값을 구한다.
- 따라서 각 sample에 대한 식을 구한 후 N개에 대한 average를 구해야 한다.
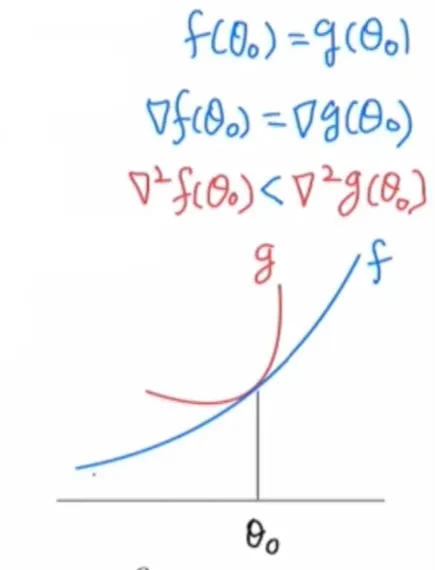
🔻 Objective function은 1차식까지 근사하는 이유

- 첫 번째 항, 즉 상수항은 에 대한 식이라 maximize하는 값에 영향을 주지 않는다.
- 2차식부터는 너무 작은 값이라 무시해도 된다.
🔻 Constraint 식은 2차식까지 근사하는 이유

- 첫 번째 항, 즉 상수항은 같은 에 대한 KL-발산 식이라 0이 된다.
- 두 번째 항은 KL-발산 식이 old policy에서 기울기가 0이 되기 때문에 사라진다.
🔷 Natural gradient
- 기존의 gradient에 Hessian의 inverse를 곱한다.
- 해당 식이 Natural gradient이다.
- Natural gradient를 통해 더 효율적으로 Object function의 Maximun값을 구할 수 있다.
- Hessian 는 기울기의 휘어짐 정도를 의미한다.
- Natural Gradient를 사용하면 gradient의 휘어진 정도를 조정하여 목표지점에 빠르게 수렴할 수 있도록 한다.
🔻 파라미터 업데이트
- 기존의 파라미터에 Natural gradient와 step size 를 곱하여 구한다.
- 사용된 는 위 constraint 식을 만족해야 한다.
- Step size 는 위 부등식이 등호일 때 가장 큰 값을 가진다.
8️⃣ Conjugate gradient & Line search
🔷 Step size
- 가장 큰 step size 는 위 식을 만족할 때 성립한다.
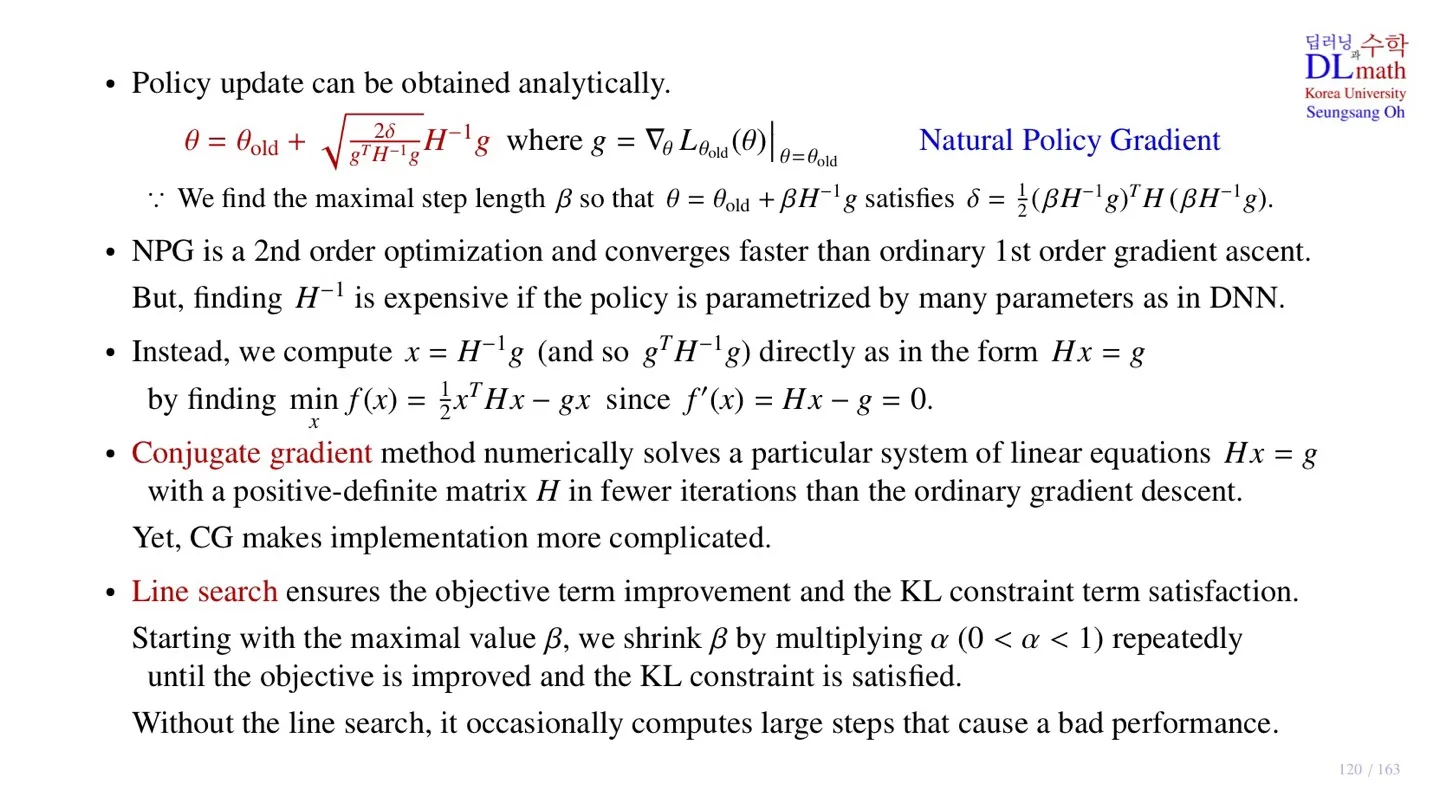
🔷 파라미터 업데이트 식
- KL-발산 Constraint 식을 만족하는 것은 Trust region을 만족하는 것이다.
- 위 Step size 내에서 Natural gradient를 통해 업데이트 하는 것은 Trust region 내에서 업데이트를 진행하는 것이다.
- 이를 Natural Policy Gradient라고 한다.
- 여기서 사용된 가 기존에 사용되었던 policy gradient를 의미한다.
🔻 Hessian 구하기
- Hessian값은 많은 양의 연산량을 요구한다.
- 또한 Inverse를 구하는 것은 더욱 어렵다.
- 따라서 우리는 대신 를 구한다.
- 일 때, 이는 의 해를 구하는 것이다.
- 이는 위 식의 해를 구하는 것으로 바꿀 수 있다.
🔷 Conjugate gradient
- 이때 는 positive definite matrix이다.
- 이 경우 기존의 gradient descent 대신 Conjugate gradient를 사용할 수 있다.
- Conjugate gradient를 사용하면 더 빠르게 수렴할 수 있다.
🔷 Line search
-
우리는 Natural gradient descent를 통해 new policy를 구할 수 있다.
-
하지만 Objective function에 많은 approximation을 사용했기 때문에 성능이 monotonic하게 improve된다는 보장이 없다.
-
또한 KL-발산 제약조건 식 역시 많은 approximation을 거쳐서 monotonic하게 improve된다는 보장이 없다.
-
우리는 approximation을 하였지만 최대한 허용 가능한 step size 를 구하였다.
-
Line search는 우리가 구한 step size 가 정말 안전한 것인지 확인하는 방법이다.
-
값을 objective function과 Constraint 식에 대입하여 두 식을 만족하는지 확인한다.
-
제약조건식이 보다 큰 값이 나오거나, 성능이 improve 되지 않는다면 값을 줄여준다.
-
값은 를 곱해주는 방법으로 줄여준다.
-
값이 조건을 만족할 때까지 를 곱해준다.
9️⃣ TRPO의 pseudo code
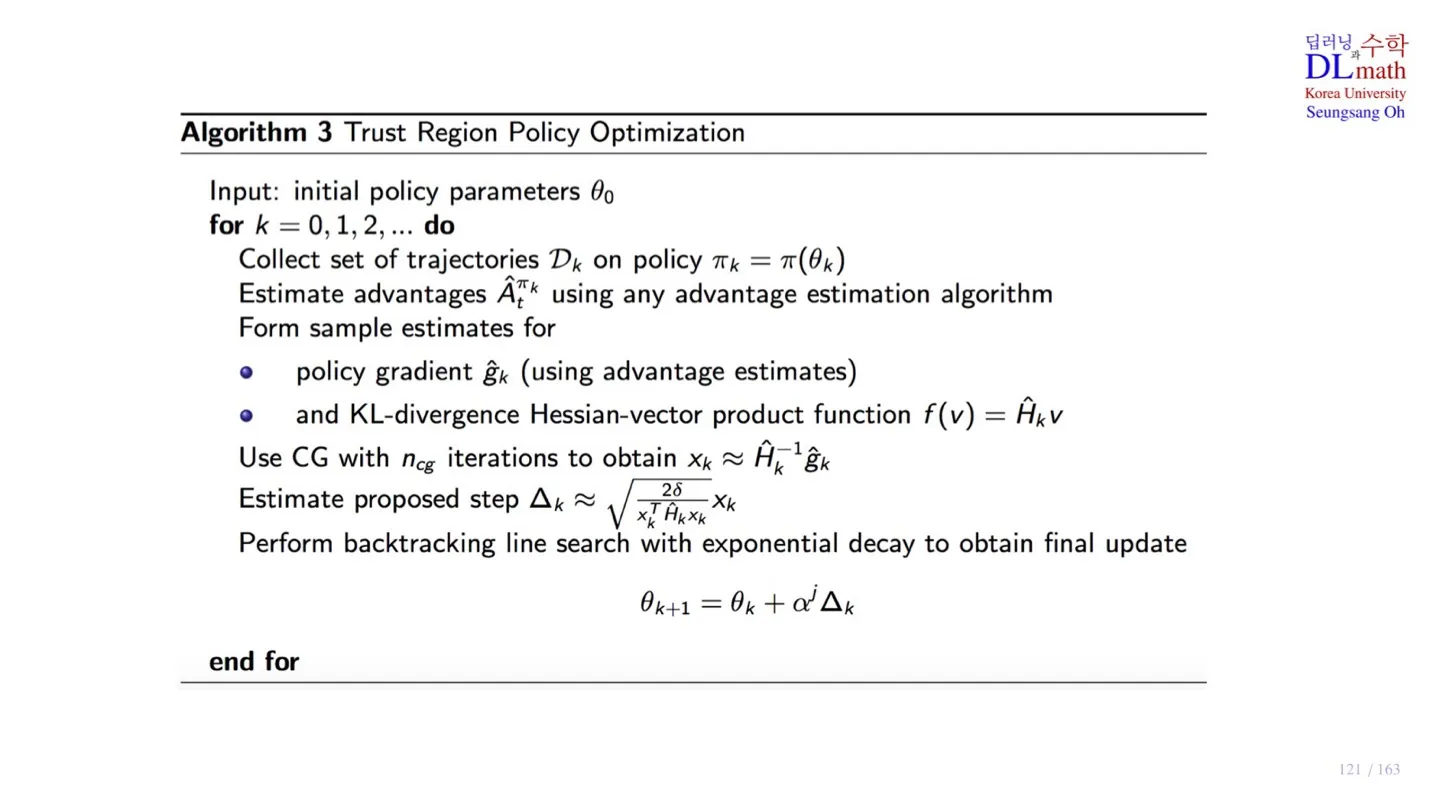
🔷 Pseudo code
🔻 파라미터 초기화
- Policy parameter를 초기화한다.
🔻 Iteration
-
1번의 Iteration마다 policy updata가 한번 수행된다.
-
Old policy에서 sample data를 수집한다.
-
Sample data를 통해 Advantage value나 Q-value를 구한다.
-
Advantafe estimate를 이용하여 gradient를 구한다.
-
식에 Conjugate gradient를 적용하여 를 구한다.
-
를 통해 Natural gradient를 구한다.
-
값에 Line search를 적용하여 제약조건 식을 만족하며 성능이 향상되는 값을 구한다.
-
해당 값을 통해 파라미터 업데이트를 진행한다.
🔷 TRPO의 단점

- TRPO는 second order optimizer를 사용한다.
- 그 결과 Adam과 같은 first order optimizer에 비해 sample efficient가 떨어진다.
- Hessian 를 를 통해 구하지만 이 역시 많은 연산량을 필요로 한다.
- 또한 Hessian 자체를 구하는데도 많은 연산량을 필요로 한다.
- 따라서 Deep CNN이나 RNN처럼 파라미터가 많은 경우 TRPO을 practical하게 적용할 수 없다.
🔟 정리
🔷 29강에서 배운 내용은 아래와 같다.
- Natural gradient는 Hessian을 적용한 gradient이다.
- Hessian을 통해 기울기의 기울어진 정도를 조정하여 수렴 속도를 높인다.
- Conjugate gradient를 통해 Hessian값을 구한다.
- Linesearch를 통해 제약조건을 만족하는 step size 를 구한다.
- TRPO는 성능이 향상된다는 이점이 있지만, 그와 동시에 연산량이 많다는 한계가 존재한다.
