👨🏫학습목표
오늘은 Optimal Policy를 찾기 위한 Optimal value function, Bellman optimality equation에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=WoJoB1D69cA&list=PLvbUC2Zh5oJtYXow4jawpZJ2xBel6vGhC&index=6
1️⃣ Optimal policy의 정의
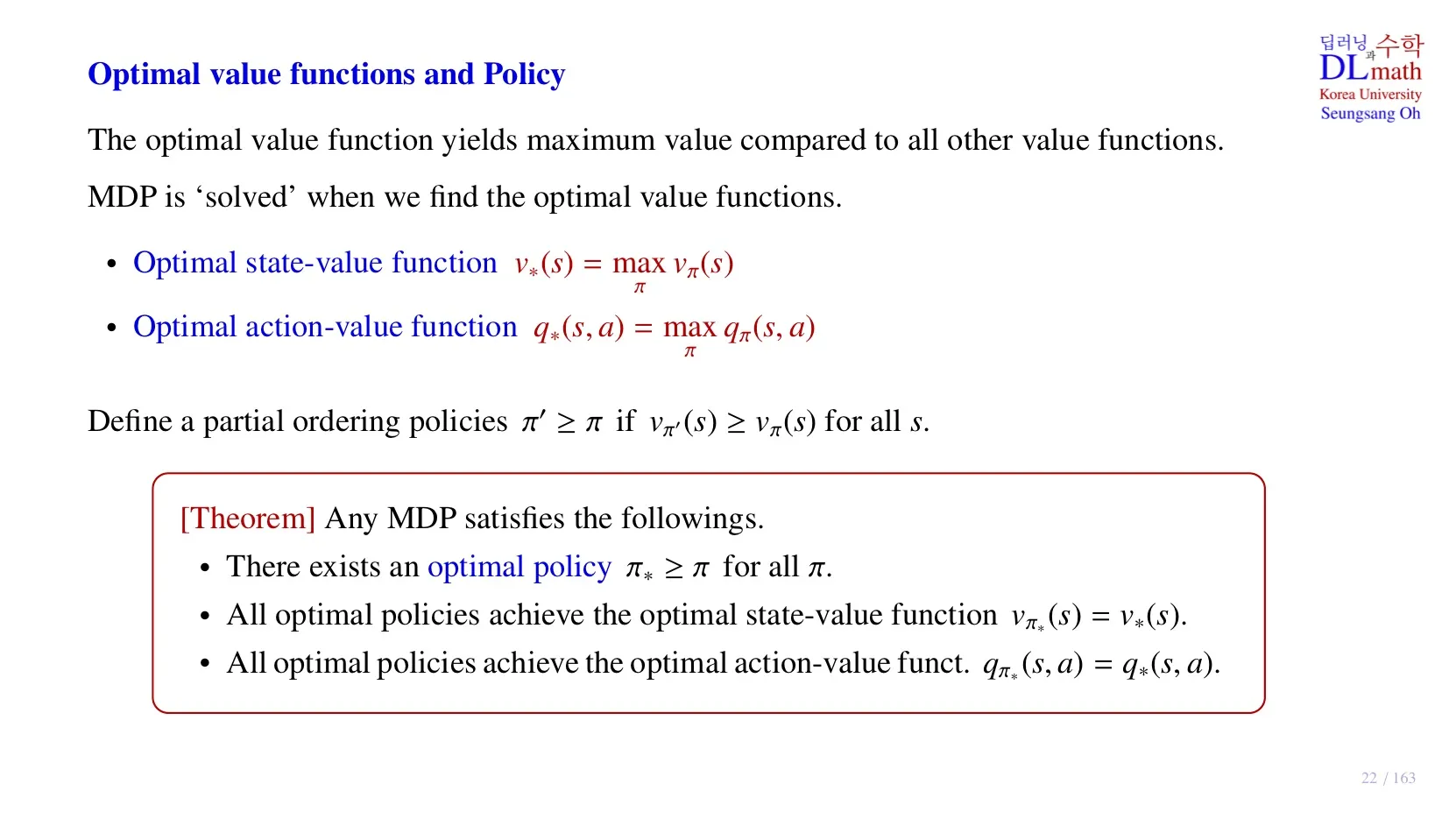
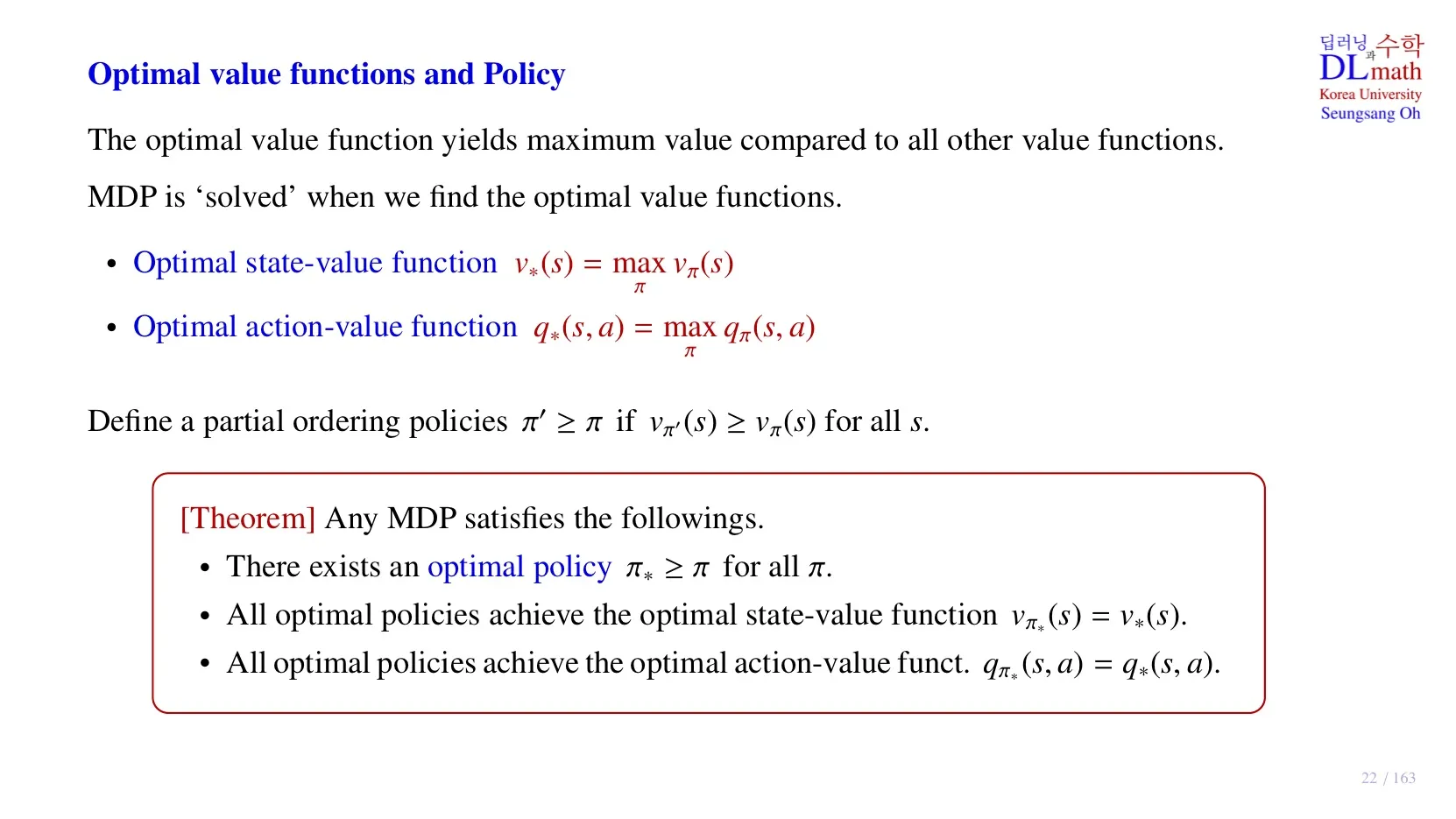
Optimal value function들 중 value가 가장 큰 함수를 optimal value function이라고 하고, optimal value function을 구하는 것이 Markov Decision Process의 해를 구하는 것이다.
🔷 Optimal state value function
- 각 state에 대해서 state value function값이 최대가 되도록 하는 policy를 적용한 state value function
🔷 Optimal action value function
- 각 state와 action pair에 대해서 action value function값이 최대가 되도록 하는 policy를 적용한 action value function
- Optimal policy를 찾기 위한 필수적인 값이다.
🔻 그런데 각 state나 state, action pair마다 value가 최대가 되는 policy가 다르면 optimal policy를 어떻게 찾나요?
그런 경우는 순서를 비교할 수 없다.
Optimal policy를 모든 state에서 value값이 비교하는 policy보다 커야 한다.
🔷 Theorem: Existence of Optimal Policies
Any MDP satisfies the followings.
- There exists an optimal policy
- All optimal policies achieve the optimal state-value function
- All optimal policies achieve the optimal action-value function
2️⃣ Optimal policy를 구하기 위해 알아야 할 것
🔷 Optimal policy
- Action-value function의 값을 최대화하는 action을 취할 확률을 1로 한다.
- 따라서 우리가 를 찾을 수만 있다면 optimal policy를 찾을 수 있다.
- 최적의 action에서 이므로 optimal state-value function은 위와 같이 정리할 수 있다.
- 위 식을 통해 Optimal action-value function 을 알면 optimal state-value function 을 알 수 있다는 것을 확인할 수 있다.
- 강화학습에서는 random sample을 이용하여 의 추정치를 계산한다.
3️⃣ Bellman optimality equation

- 두 식 모두 Bellman expectation equation에서 optimal policy를 적용한 식이다.
- 식을 분해하였을 때, 을 적용하면 아래의 식들이 유도된다.
🔷 Dynamic Programming
- 각 수식을 보면 와 value function을 알 때, 현재 value function을 계산할 수 있음을 확인할 수 있다.
- 해당 식들은 서로 의존적이기 때문에 하나의 값만 알아서는 계산할 수 없다.
- 일반적으로 를 알고 있는 경우를 Model-based라고 한다.
4️⃣ Bellman Optimality Equation의 Backup Diagram
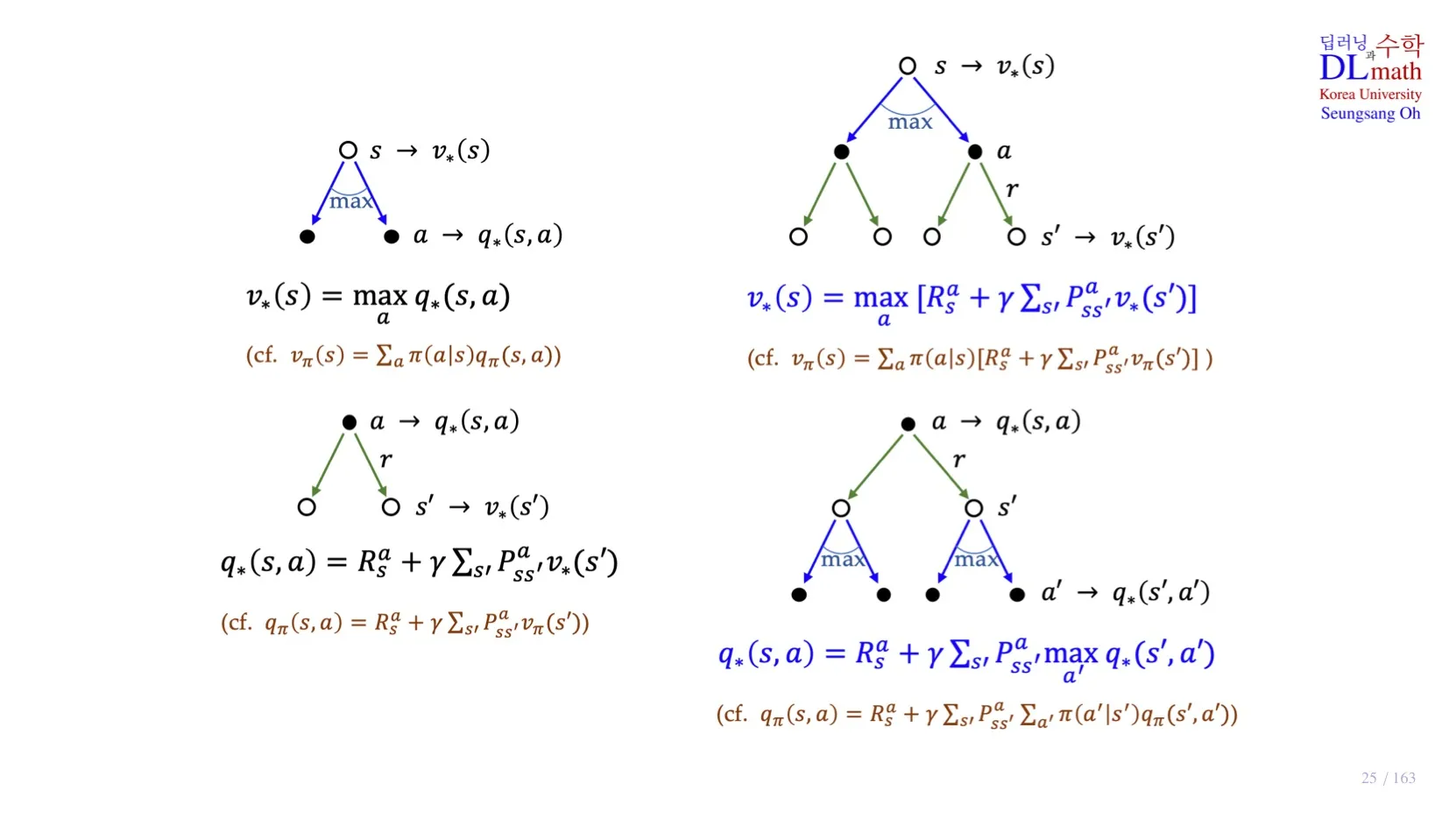
Optimal expectation과 마찬가지로 분해한 두 식을 각각 서로 다른 식으로 채워넣으면 아래의 두 식이 유도된다.
5️⃣ 정리
🔷 6강에서 배운 내용은 아래와 같다.
- Optimal policy의 정의에 대해 배웠다.
- Optimal policy를 구하기 위해 를 알아야 한다.
- Bellman Optimality Equation에 대해 배웠다.
- Dynamic Programming을 계산하기 위해서는 를 알아야 한다.

I'm curious about AI