👨🏫학습목표
오늘은 Dynamic programming의 정의와 특징과 Reinforcement의 종류에 대해 배울 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=4i_ycR6uCdQ&list=PLvbUC2Zh5oJtYXow4jawpZJ2xBel6vGhC&index=7
1️⃣ Dynamic Programming
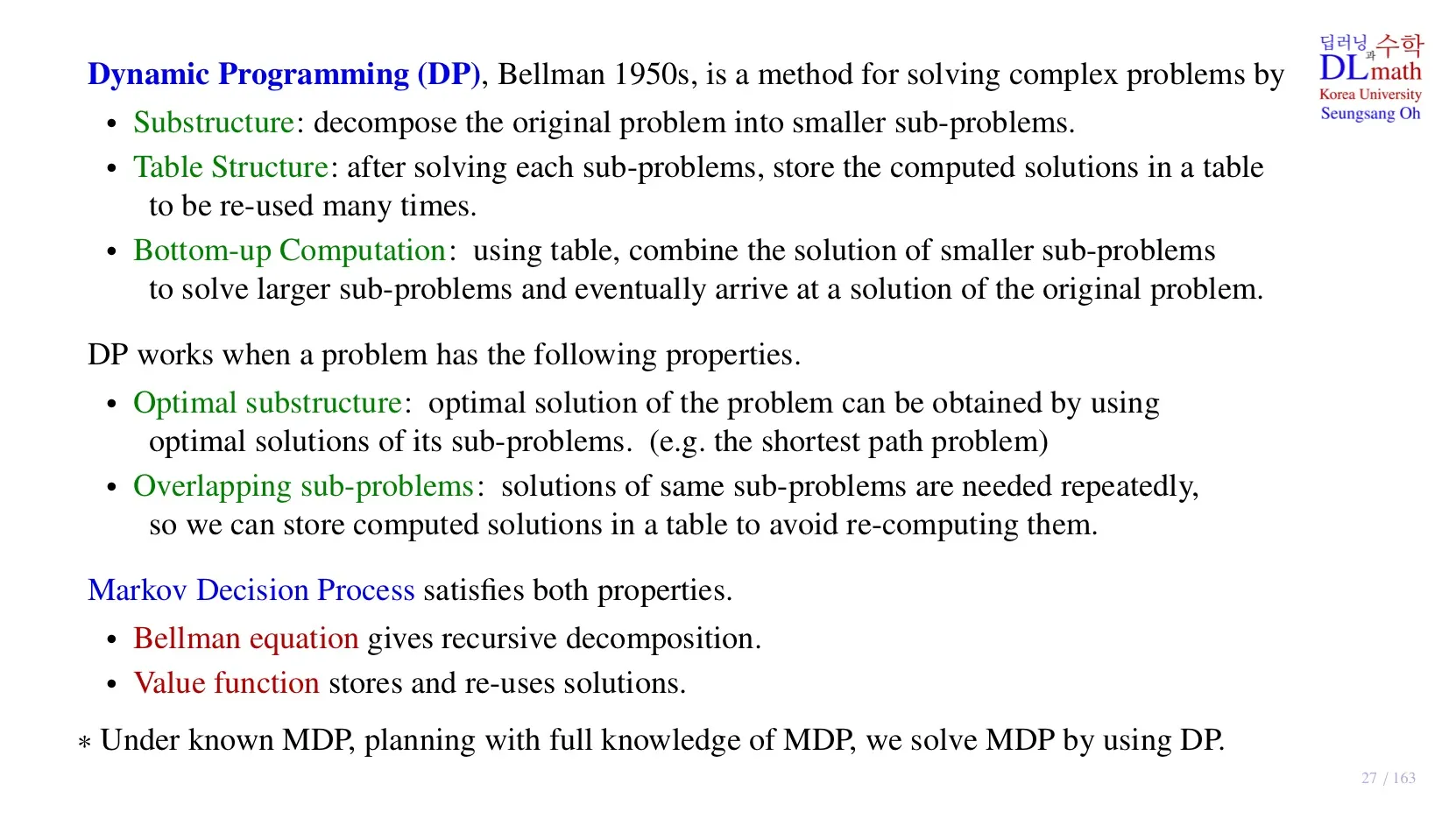
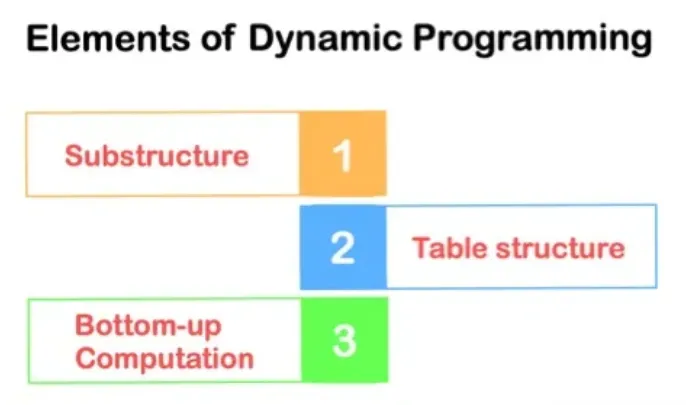
🔷 Dynamic programming (DP)이란?
- 복잡한 문제를 여러 개의 간단한 문제로 나누어서 효율적으로 계산하는 방법이다.
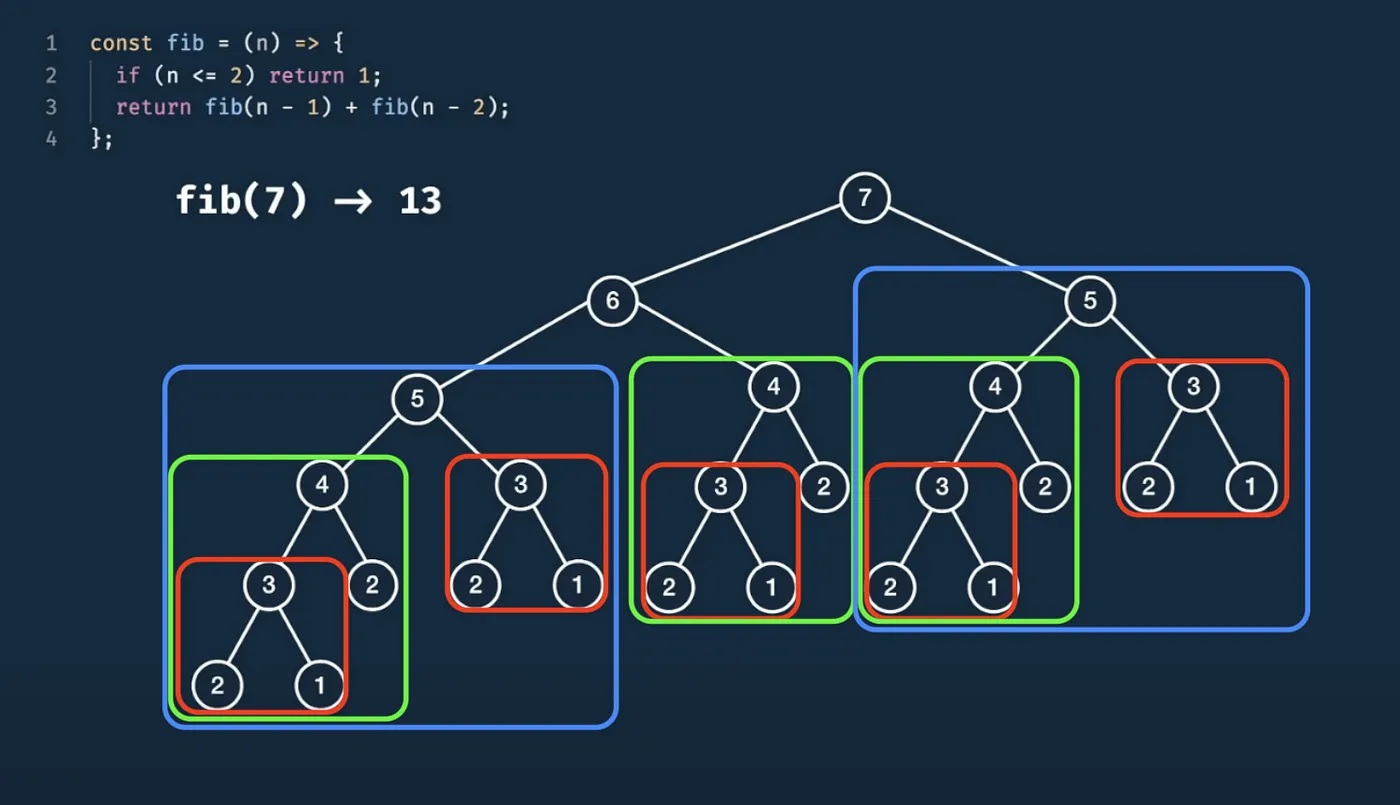
출처: https://matthewaquino.medium.com/intro-to-dynamic-programming-with-the-fibonacci-sequence-d9005e577854
🔻 Substructure
- 복잡한 문제를 여러 개의 단순한 문제로 분해하는 단계이다.
🔻 Table Structure
- 분해된 작은 문제들의 답을 구한 후, 해답들을 하나의 표에 정리하는 단계이다.
🔻 Bottom-up Computation
- 작은 문제들의 해답을 이용해서 조금 더 큰 문제를 풀고, 이 방식을 통해 원래의 복잡한 문제를 해결하는 단계이다.
🔷 DP를 적용하는 문제의 특징
🔻 Optimal substructure
- 우리가 구하고 싶은 문제의 optimal solution이 작은 문제들의 optimal solution을 통해 구할 수 있는 경우.
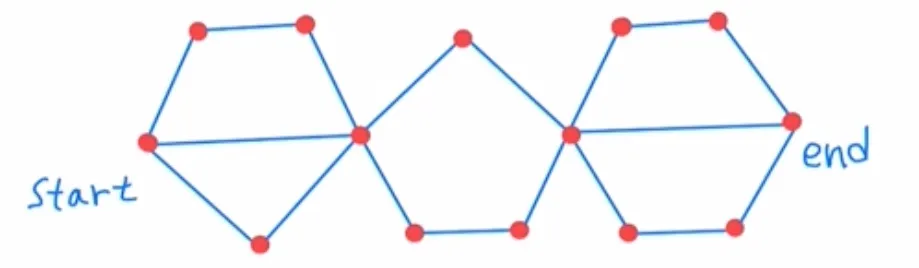
- 가장 짧은 경로로 출발점에서 도착점으로 이동하고 싶은 경우.
🔻 Overlapping sub-problems
- 우리가 구하고 싶은 문제의 optimal solution을 구하기 위해서 작은 문제들의 optimal solution이 반복적으로 사용되는 경우.
- 이 특징에 따르면 위 그림의 예시는 DP 문제에 해당하지 않는다.
🔷 Markov Decision Process에 DP 적용
🔻 Bellman Equation
- Bellman equation을 통해 problem을 recursive하게 분해할 수 있다.
- 를 모르기 때문에, 현재 value state function 에서 로 업데이트 하면서 를 구한다.
🔻 Value function
- 각 Value function들이 최종 solution을 위해 기록되었다가 반복적으로 사용된다.
- 각 , 기록해 두었다가 사용한다.
❗주의사항
- 해당 Dynamic programming을 적용하기 위해서는 state transition probability를 알고 있어야 한다.
2️⃣ Sequential Decision Problem
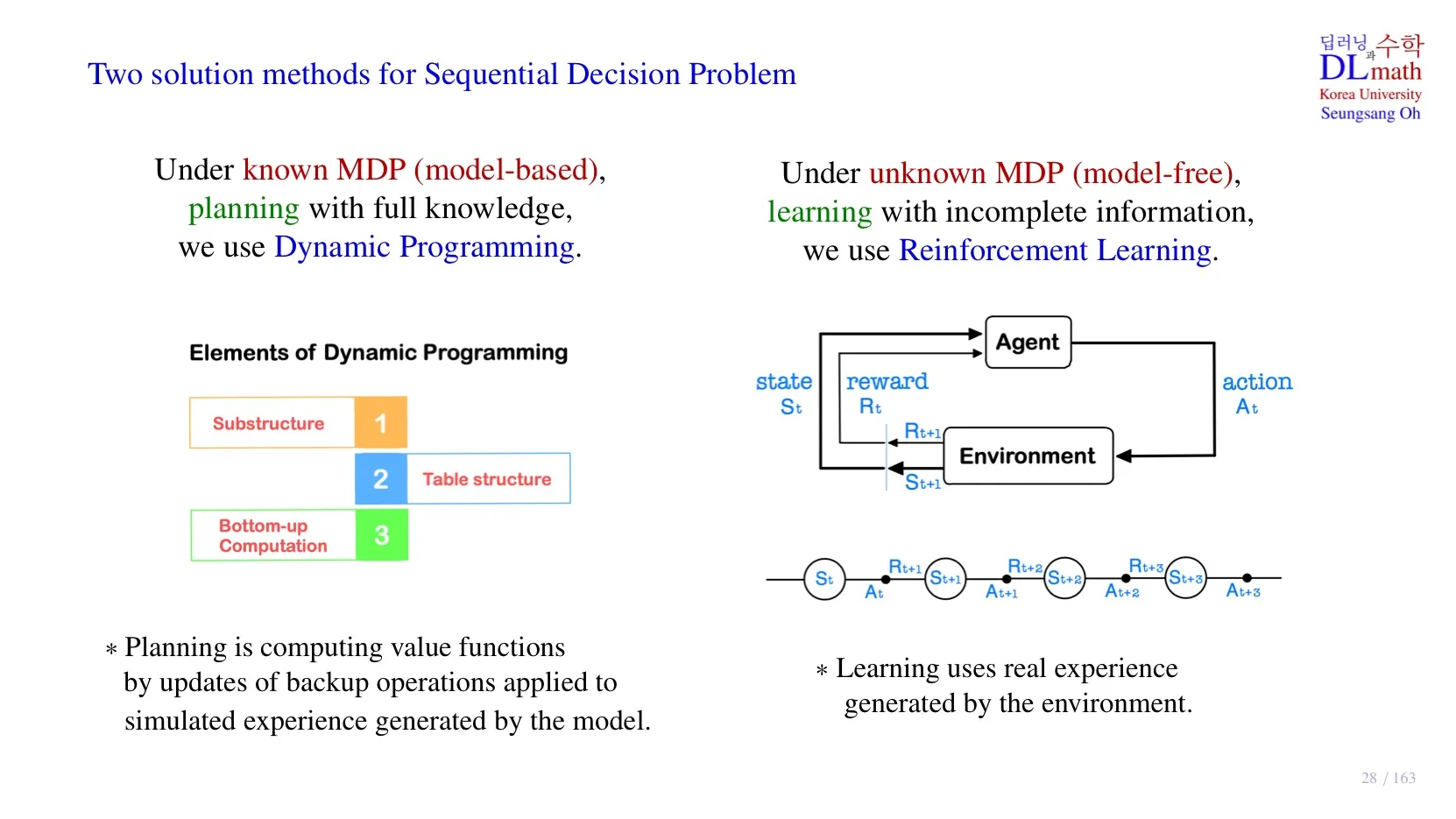
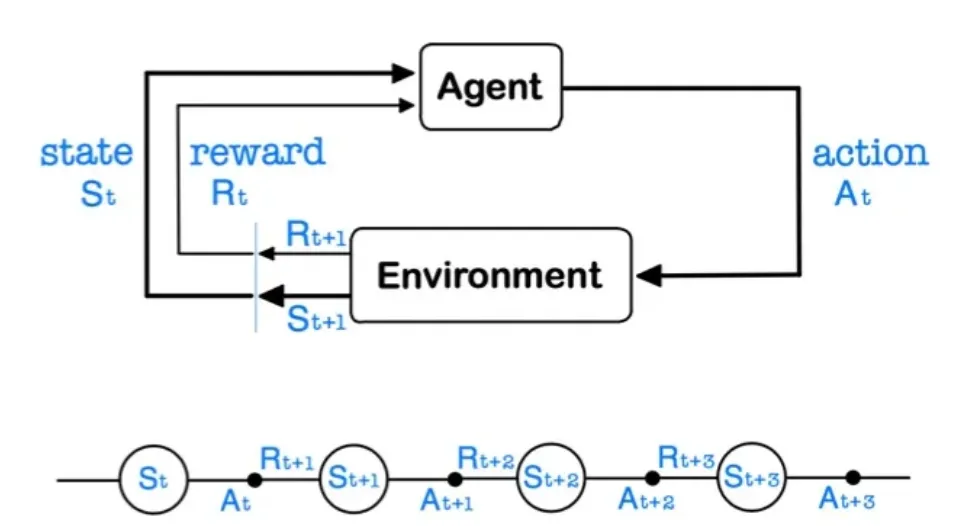
🔷 Sequential Decision Problem
- 순차적 행동 결정 문제로, 각 시간마다 어떤 행동을 해야하는지 결정해야 하는 문제이다.
- Markove Decision Process로 이해해도 무방하다.
- 이러한 Markov Decision Process를 해결할 수 있는 방법이 Dynamic Programming과 Reinforcement Learning이다.
- 두 방법의 가장 큰 차이점은 transition probability 와 그때의 reward 를 알고 있는지의 여부이다.
🔻 Dynamic Programming
- Known MDP (model-based)
- , 를 알고 있는 경우.
- Planning: 시행착오 없이 알고 있는 정보를 토대로 optimal policy를 구한다.
😅 Dynamic programming의 한계점
- Computational Complexity: 원래 문제가 복잡하기 때문에 계산 복잡도가 높다.
- Curse of Dimensionality: state를 table에 저장할 때, state의 차원이 너무 크면 table에 모두 저장할 수 없다.
- Knowledge of Environment Model: state transition probability와 그에 대한 reward에 대해 완벽하게 알아야 한다.
🔻 Reinforcement Learning
- Unknown MDP (model-free)
- , 를 모르는 경우.
- Learning: 환경 속에서 얻은 경험을 통해 optimal policy를 구한다.
- 의 경험을 통해 데이터를 구한 후, 이러한 데이터를 쌓아 를 추정한다.
- 모든 state가 아닌 sample 에 대해서만 계산을 할 수 있기 때문에, 계산복잡도나 차원의 저주 문제를 해결할 수 있다.
3️⃣ Reinforcement Learning의 종류
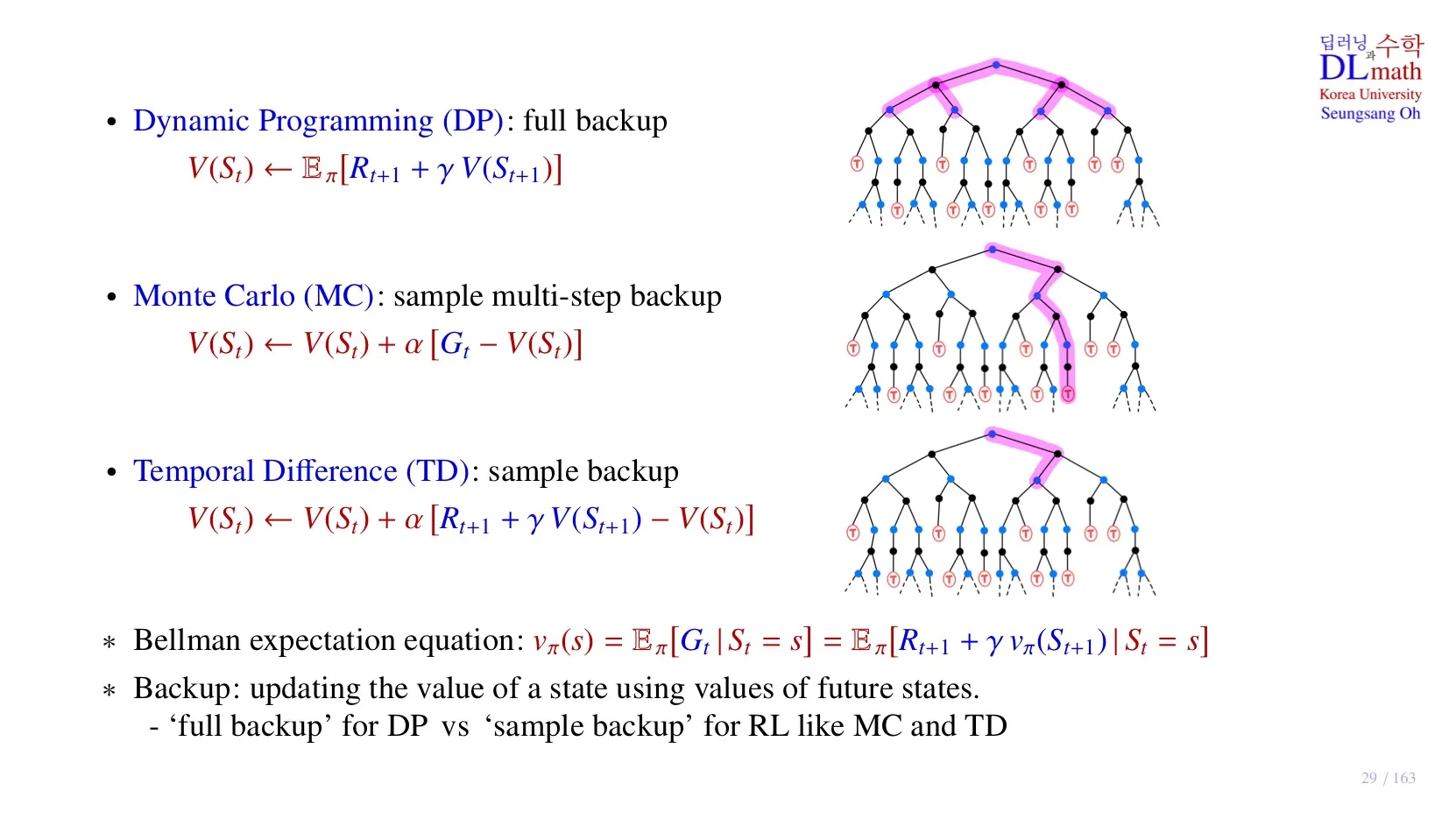
🔷 Dynamic Programming (DP)
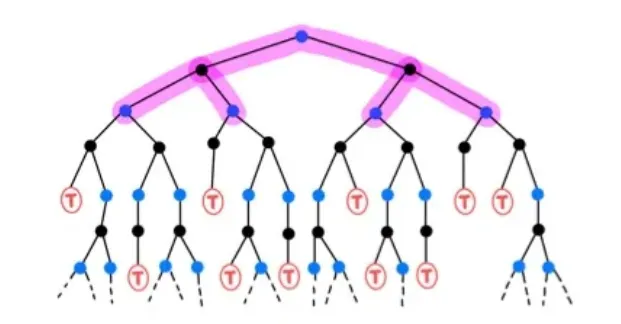
- 현재의 를 계산하기 위해 모든 를 알아야 한다.
- 모든 미래의 를 통해 계산을 수행하기 때문에 full backup이라고 한다.
🔷 Monte Carlo (MC)
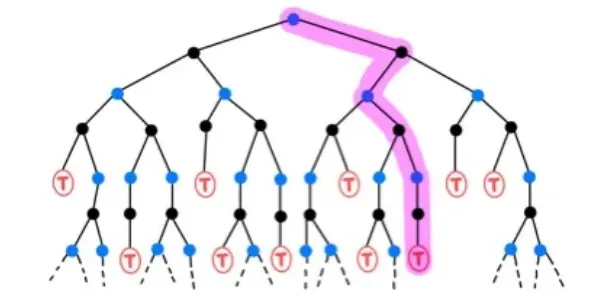
- Sample data를 사용하여 계산한다.
- Return 를 사용하여 계산한다.
- 하나의 episode의 모든 state를 알아야 하기 때문에 sample multi-step backup이라고 한다.
🔷 Temporal Difference (TD)
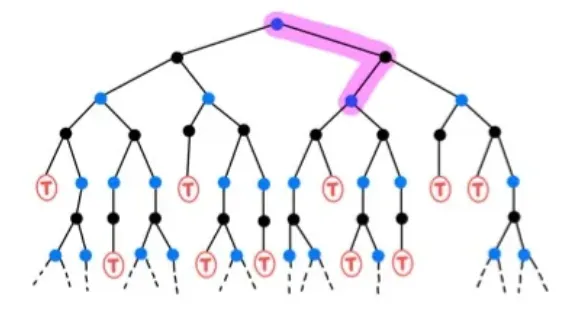
- Sample data를 사용하여 계산한다.
- Immediate Reward 와 next state 를 사용하여 계산한다.
- 다음 state만 알아도 되기 때문에 sample backup이라고 한다.
4️⃣ 정리
🔷 7강에서 배운 내용은 아래와 같다.
- Dynamic programming의 3단계에 대해 배웠다.
- Dynamic programming을 적용하기 위한 문제 조건에 대해 배웠다.
- Dynamic prgramming과 Reinforcement Learning의 차이에 대해 배웠다.
- Reinforcement Learning의 종류에 대해 간단히 살펴보았다.

I'm curious about AI