👨🏫학습목표
오늘은 Policy Iteration의 정의와 Value Iteration보다 나은 장점에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=6GhwCE43oFk&list=PLvbUC2Zh5oJtYXow4jawpZJ2xBel6vGhC&index=9
1️⃣ Policy Iteration
📕 지난시간에 배웠던 내용
💡 Value Iteration
Bellman optimality equation을 만족하는 Optimal state value function 을 찾는 것이다. 이를 이용하여 Optimal policy 를 찾는다.
😅 Value Iteration의 한계
- 점화식 자체의 연산량이 많다.
- State value function이 수렴하기 전에 Policy가 먼저 수렴하는 경우가 있다. → 필요 이상의 연산량 발생.
❗이러한 한계를 극복하기 위해 등장한 방법이 Policy Iteration이다.
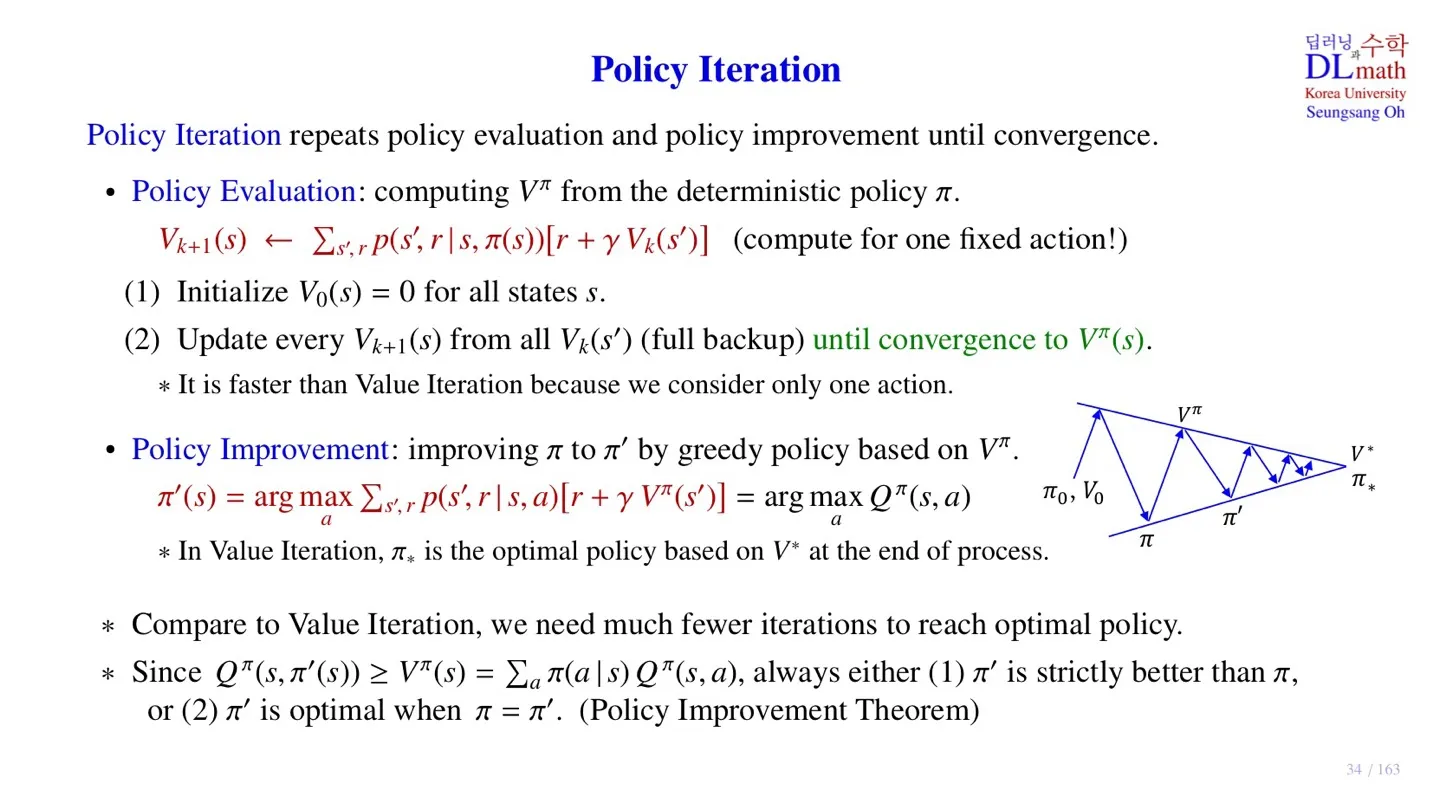
🔷 Policy Iteration
Policy Iteration은 policy evaluation과 policy improvement 이 2단계를 반복적으로 사용하여 진행된다.
🔻 Policy Evaluation (PE): 정책 평가
- Bellman expectation equation을 사용한다.
- Bellman expectation equation을 사용하기 위해서는 Policy가 주어져야 한다.
- 따라서 를 Deterministic policy로 두고 시작한다.
→ (하나의 state에 하나의 action)
🟤 최종적으로 도출된 점화식
- Policy가 deterministic하기 때문에 action이 모두 고정되어 있다.
- 따라서 Value Iteration과 달리 action에 대한 연산은 수행할 필요가 없다.
🟤 수렴 과정
- Value Iteration과 동일하게 초기 으로 설정한다.
- 를 통해 를 업데이트 한다.
- 수렴한 를 구한다.
여기서 구한 는 주어진 policy 에 대한 state value function이다.
🔻 Policy Improvement (PI): 정책 개선
- Policy evaluation을 통해 구한 state value function과 greedy policy를 활용하여 policy를 개선하는 과정이다.
-
해당 수식을 통해 개선된 는 optimal은 아니지만, 앞선 policy 보다는 개선된다는 점이 중요하다.
-
Value Interation과 비교하여 훨씬 적은 Iteration으로 optimal policy에 도착한다.
🟤 그렇다면 policy가 개선되는 것은 어떻게 알 수 있을까?
-
주어진 policy에서 가능한 모든 action값의 기대값보다 특정 policy 의 action value가 더 클 수 있다.
-
아래의 식 결과 와 는 항상 2가지 경우 중 한가지를 만족한다.
이를 Policy Improvement Theorm이라 한다.- 는 보다 개선된다.
- 와 의 state value function 값이 동일하다.
(value가 동일한 것이지, policy가 완전히 동일한 것을 의미하지는 않는다.)
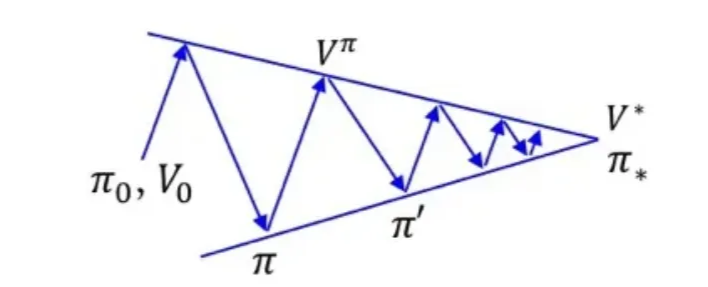
2️⃣ Policy Improvement Theorem
🔷 Policy Improvement Theorem
- 수식의 의미: 모든 state에서 인 경우, 해당 policy가 개선되었다고 할 수 있다.
🔻 증명
- 을 Bellman equation으로 풀어쓰면
- 수식을 보면 state-value function은 앞서 구한 policy의 value값을 그대로 사용하는 것을 확인할 수 있다. 그리고 action은 개선된 action을 사용한다. ( 로 결정된 action )
- 이때 를 계산하기 위해 사용된 확률은 조건부로 이므로 기대값을 로 바꿀 수 있다.
- 그리고 해당 조건은 생략한다.
- 를 사용하여, 로 바꾼다.
- 지금까지의 과정을 반복한다.
- 를 묶고 조건부 를 제거한다.
- Return 이므로
- 따라서 주어진 state에 대한 policy 의 state-value function이 될 수 있다.
- 증명 완료, 를 통해 를 구한다.
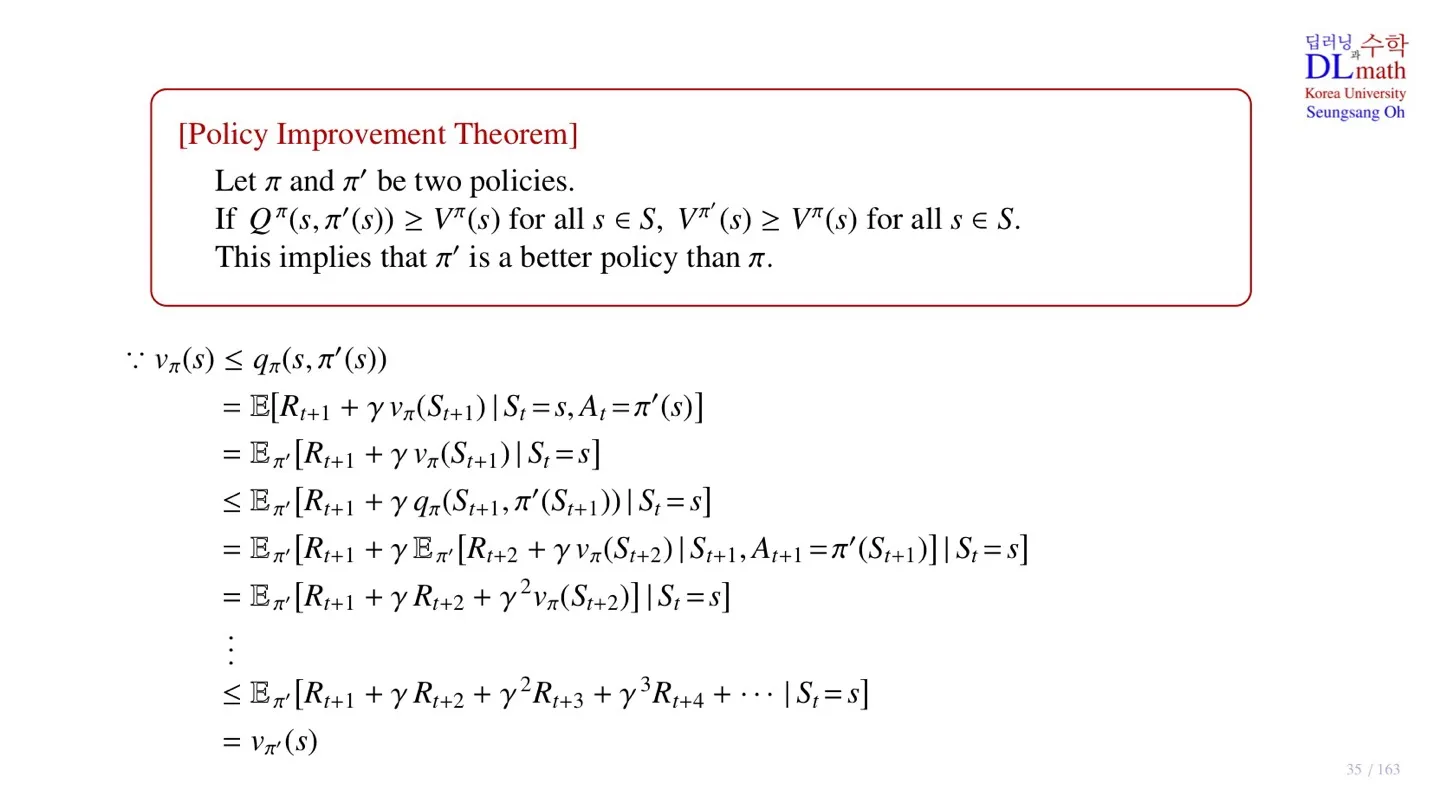
3️⃣ A finite MDP에서 Policy Iteration
🔷 Iteration
- Policy 를 지정하고 policy evaluation을 통해 state-value function을 구한다.
- Policy improvement를 통해서 새로운 policy 를 구한다.
- 이러한 과정을 수렴할 때까지 반복한다.
🔷 A finite MDP
- A finite MDP는 모델이 취할 수 있는 state와 action이 유한하다는 의미이다. 따라서 모델이 취할 수 있는 policy 역시 유한하다.
- 그 결과 유한한 Iteration을 통해 optimal policy를 구할 수 있다.
- 최종적으로 을 만족하면
- 이 Bellman optimality equation을 만족하는 해가 된다.
4️⃣ Policy Iteration의 pseudo code
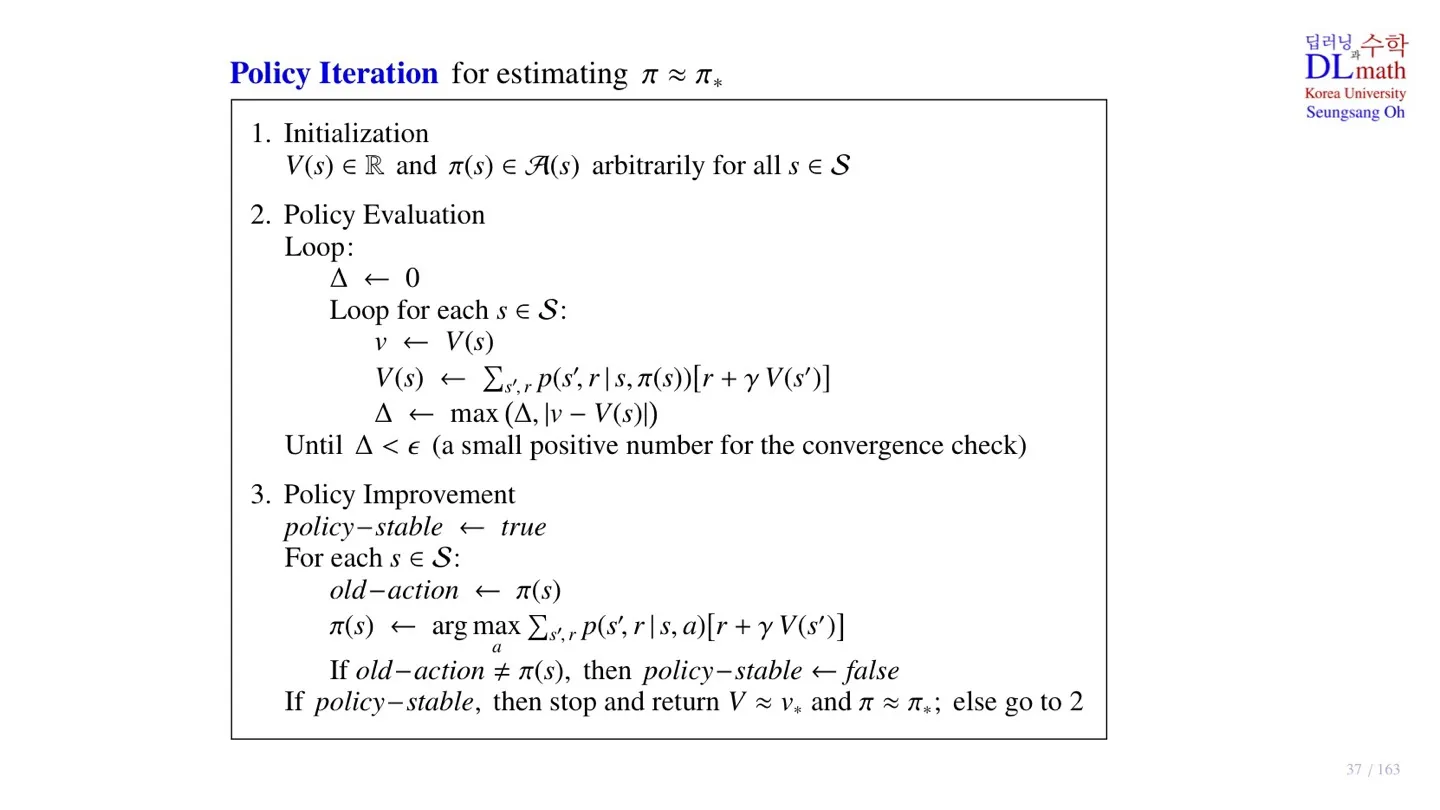
🔻 1. Initialization
- State-value function 와 policy 모두 초기화한다.
🔻 2. Policy Evaluation
- 점화식의 변화, Deterministic policy를 사용하는 것을 제외하고는 Value-Iteration과 동일.
🔻 3. Policy Improvement
- Old policy와 New policy가 다르면 policy Evaluation으로 돌아간다.
- Old policy와 New policy가 동일해질 때까지 진행
5️⃣ Convergence of Policy Evaluation
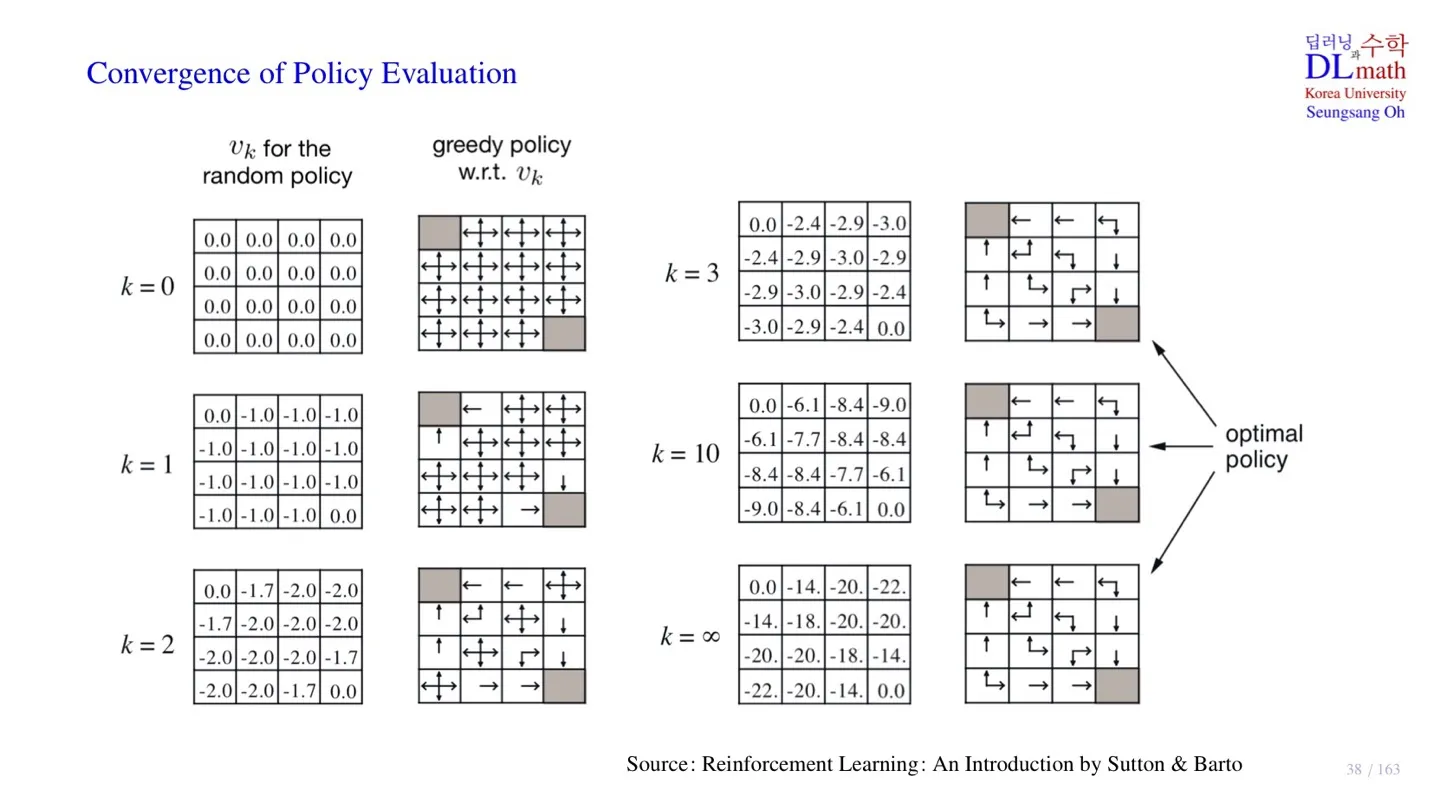
- 주어진 단계에서의 state value function과 improved policy를 확인할 수 있다.
- 이후에는 optimal policy가 고정되어 있는 것을 확인할 수 있다.
- Value Iteration에서는 state-value function이 수렴할 때까지 Iteration이 반복되지만, Policy Iteration을 사용하면 에서 Iteration을 멈출 수 있다.
6️⃣ Dynamic Programming & Reinforcement Learning
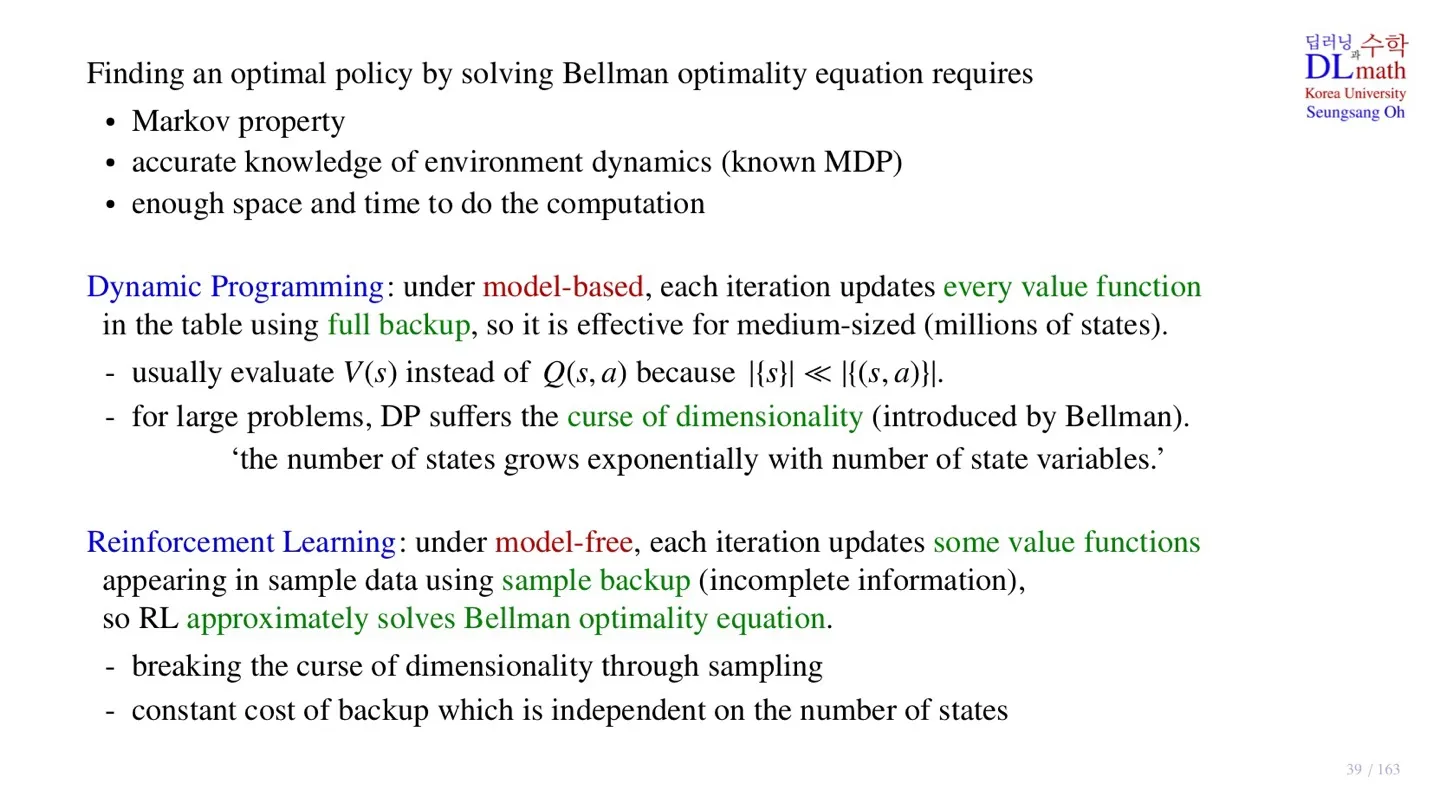
🔷 Dynamic Programming
- Optimal policy를 구하기 위해, Bellman optimality equation을 사용한다.
- 계산을 위해서는 아래의 조건을 필요하다.
- Markov Property
- transition probability
- 각 state-value function값을 저장하기 위한 공간과 시간
- 모든 state-value function값을 저장하기 때문에 몇백만 개 내외의 state에서 구현 가능한다.
- State와 action을 모두 고려한 를 table에 저장하면 경우의 수가 너무 많아 주로 state-value function을 사용한다.
- state로 표현하는 variable이 너무 많아지면, state의 개수 역시 급격하게 증가하는 문제가 있다.
- ex) 사족 보행 로봇이 있을 때, 각 다리마다 3개의 관절이 있으면 4개에 총 12개의 관절이 존재한다. 즉 state로 표현 해야하는 variable의 수는 12개이다. 그리고 각 관절이 취할 수 있는 각도 즉 state가 10가지 존재한다고 하자. 그렇다면 사족 보행로봇의 다리의 state는 가지의 state가 존재한다.
- Robotics의 경우 관절의 수가 굉장히 많기 때문에 Dynamic programming으로 문제를 해결할 수 없다.
🔷 Reinforcement Learning
- 각 Iteration마다 모든 value function이 아닌 일부 value function만 계산한다.
- Value function은 sample 데이터를 통해 얻은 state 또는 state-action pair를 사용한다.
- 완전한 정보로 수행되는 것이 아니기 때문에 Bellman optimality equation의 근사치를 사용한다.
- Sampling을 사용하기 때문에 Curse of dimension에서 자유롭다.
- 컴퓨팅 비용은 학습 시 사용하는 Batch의 개수에 결정되어 state의 개수와는 무관한다.
7️⃣ 정리
🔷 9강에서 배운 내용은 아래와 같다.
- Policy Iteration의 2단계에 대해 배웠다.
- Policy Improvement Theorem에 대해 증명하였다.
- Policy Iteration의 pseudo code에 대해 살펴보았다.
- Value Iteration보다 연산량이 적음을 배웠다.
- 연산량의 관점에서 Dynamic Programming과 Reinforcement Learning을 비교하였다.

I'm curious about AI