행렬 (Matrix)
-
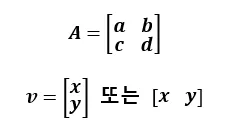
단순 정의 : 사각형 안에 수를 행과 열에 맞춰 배열한 것
-
복잡한 선형 변환의 식을 계산하기 편하게 단순화시킨 계산 도구
-
선형 변환의 표현
-
-
함수로서의 행렬 :
-
벡터로서의 행렬 :
행렬과 행렬의 덧셈 연산

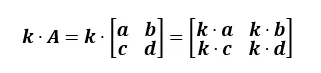
행렬과 스칼라의 곱셈 연산
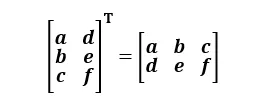
행렬의 전치 (Transpose) 연산
- 행과 열을 변경
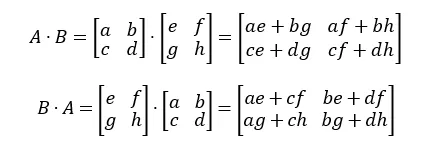
행렬과 행렬의 곱셈 연산
- 행과 열을 교차해서 곱해준 후 더함

행렬 곱셈 연산의 특징
- 교환 법칙을 만족하지 않음
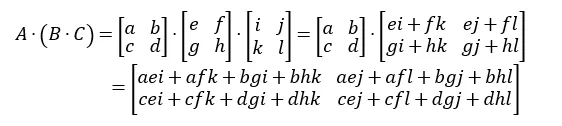
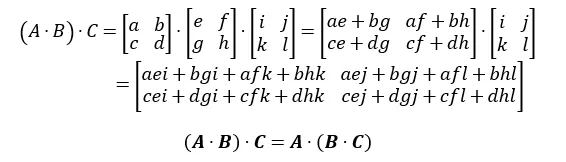
- 결합 법칙은 만족
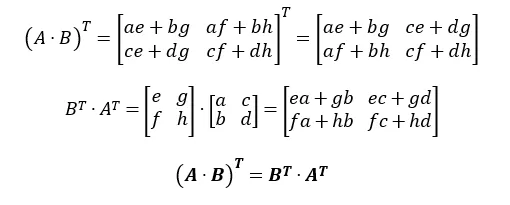
- 행렬 곱의 전치 연산
- 복잡하지만 분배법칙도 만족
선형 변환과 행렬
- 대응관계를 가지는 선형 변환의 식
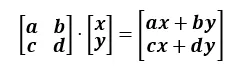
- 정방행렬과 열벡터의 곱셈
-
이의 결과는 무엇을 의미하는가?
-
정방 행렬은 같은 차원의 공간이 서로 대응되는 선형 변환을 의미한다.
-
열벡터는 벡터 공간의 벡터를 의미한다
-
열기반 행렬과 행기반 행렬
- 열기반(Column Major) Matrix : OpenGL → 수학에서 사용하는 기본 방식
- 행기반(Row Major) Matrix : DirectX 및 게임 엔진에서 사용하는 방식

- 열기반과 행기반은 전치 관계일 뿐 결과는 동일함을 보장
선현 변환의 시각화
원 벡터 공간의 선형 변환
- 원 공간에 속한 임의의 벡터에 대한 조합식
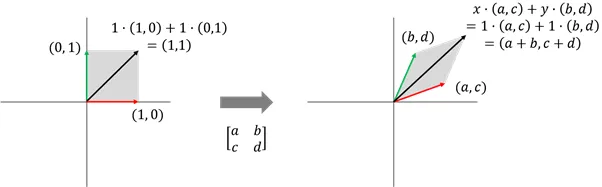
- 선형 변환 후 변환된 기저 벡터를 조합해 벡터를 추적
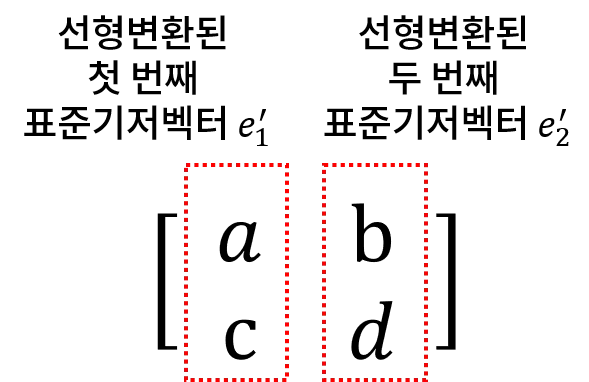
기저 벡터의 변환
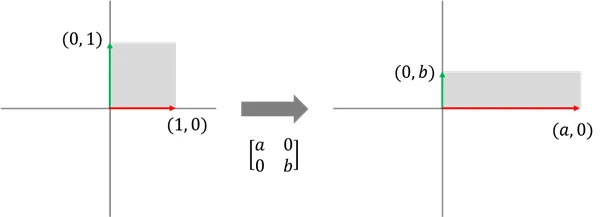
크기 변환 행렬
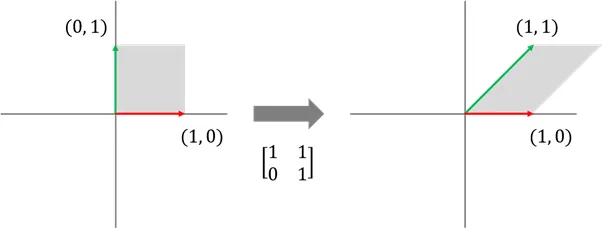
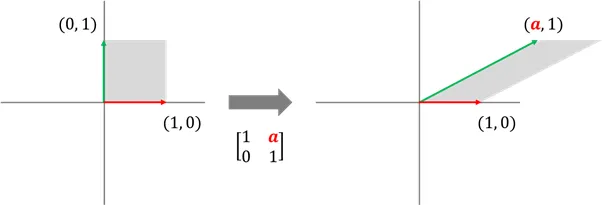
밀기 변환
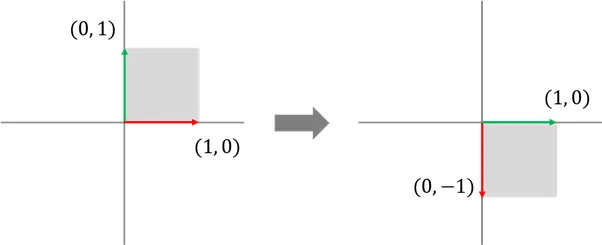
시계 방향 90도 회전 변환
반시계 방향 90도 회전 변환
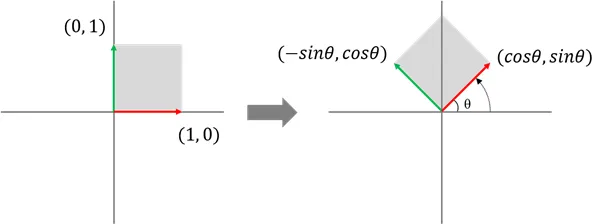
임의의 각 에 대한 회전 변환
4. 행렬의 곱
행렬의 곱
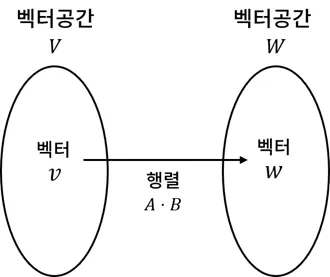
- 행렬은 하나의 선형 변환에 대응되며 행렬의 곱은 선형 변환을 적용한 결과에 다시 선형 변환을 적용한 결과를 다음과 같이 진행
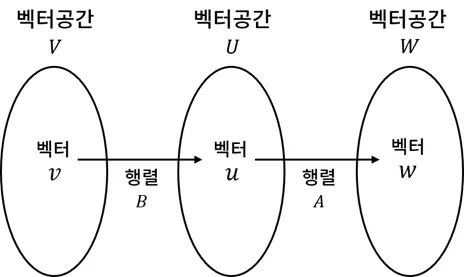
- 이를 수식으로 나타내면
- 그런데 행렬은 결합법칙이 성립하므로 위 식은 다음과 동일
- 그렇다면 두 행렬을 곱한 식 는 벡터공간 에서 벡터공간 로 직행하는 합성변환을 의미하며 함수의 와 동일한 의미를 갖음
삼각함수의 합 공식
- 이러한 행렬의 특징을 사용하면 삼각함수의 합 공식을 유도 가능
행렬의 장점
- 이러한 결합법칙이 성립하는 행렬 연산의 특징은 변환이 여러 개가 존재하더라도 동일한 결과를 보장
-
앞으로 우리가 사용할 주요 선형 변환은 다음과 같음
- Scale ( S )
- Rotation ( R )
- Translation ( T )
- View ( V )
- Projection ( P )
-
10만개의 벡터에 위의 다섯가지 변환을 각각 적용하면 다음과 같이 50만번의 연산이 발생
- 그런데 변환이 고정되어 있다면 를 미리 계산해 행렬을 생성한 후 이를 사용하면 동일한 결과를 만들어주는 연산은 10만번으로 해결

상상을 구현하는 개발자