아핀 공간에서 점의 조합
-
앞서서 아핀 공간에서 점 + 점의 연산은 불가능 하였음
-
스칼라 보조를 사용하여 다음과 같은 조합식을 만들 때
- 2차원의 점이라고 가정할 경우 위 조합식은 다음과 같이 전개됨
- 이 때 위 결과가 점이 되기 위해서는 마지막 차원 값이 반드시 1이 되어야 한다. 따라서 다음의 수식이 성립
- 이를 원 식에 대입하면 다음의 식이 만들어지며 이는 점을 보장해주며 값에 따라 무수히 많은 점을 만들어낼 수 있음
아핀 조합의 수식
아핀 조합에 따른 점의 생성
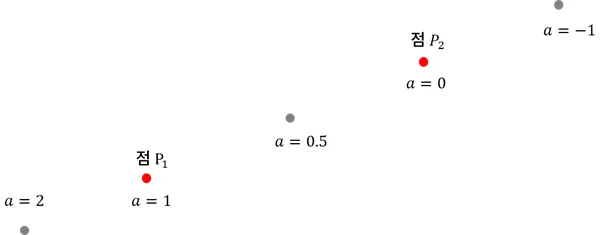
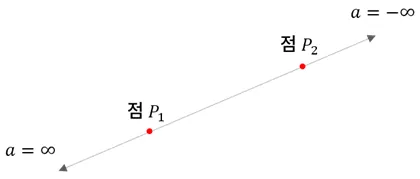
- 값에 따라 생성된 점들이 위 그림과 같이 같은 선상에 있음을 어떻게 증명할 수 있을 것인가?
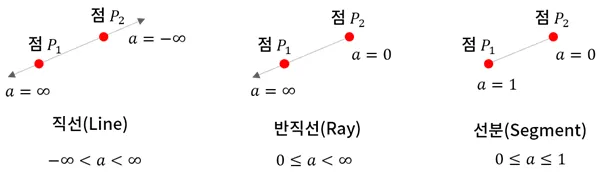
선의 종류
점의 표현
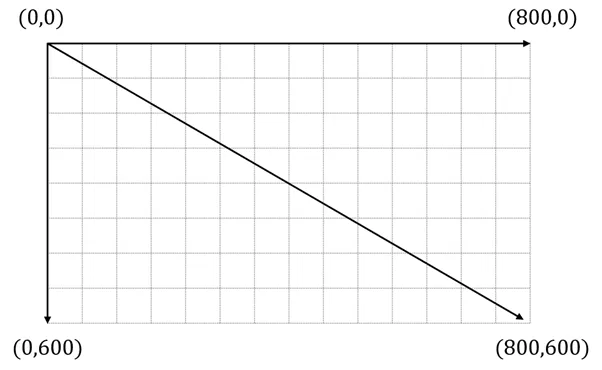
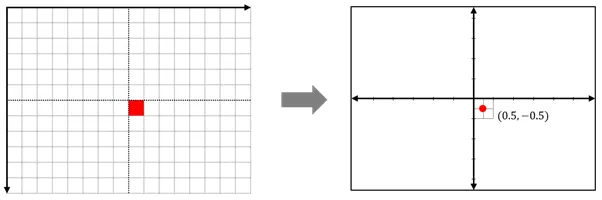
스크린 좌표계
- 화면은 픽셀들로 구성되어 있으며, 다음과 같은 좌표계를 사용하며 픽셀의 위치를 관리
-
수학에서 사용하는 데카르트 좌표계와 스크린 좌표계의 차이
-
데카르트 좌표계
-
실수
-
오른손 좌표계(우상방향 증가)
-
연속성
-
-
스크린 좌표계
-
양의 정수
-
왼손 좌표계(우하방향 증가)
-
이산성
-
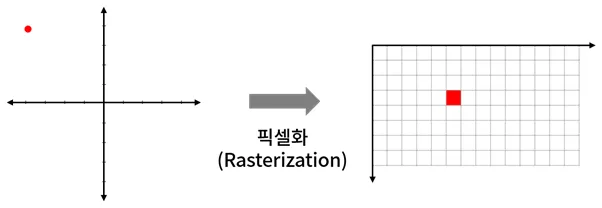
픽셀화 (Rasterization)
-
-
물체의 형상을 픽셀로 변환해 표현하는 작업
-
화면의 해상도가 짝수인 경우 을 표현하는데 한계가 발생
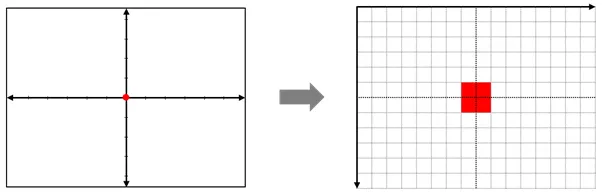
- 이 경우에는 지정된 규칙에 따라 네 개 중 하나의 픽셀을 선택할 수 밖에 없음
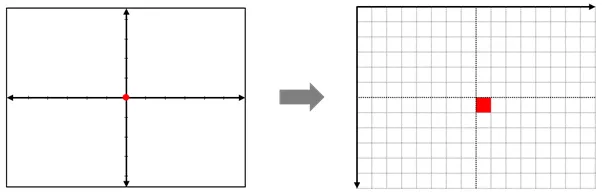
- 픽셀을 벡터로 변환할 때에는 픽셀 영역 하나의 대표값을 지정 해야 함
선 그리기 알고리즘 (브레젠험 알고리즘)
- 직선의 방정식으로 그리기

- 이론적으로는 다음과 같이 그릴 수 있으나 실용적인 방법 x
- 스크린 좌표계에서 픽셀 좌표는 정수로 고정
- 1962년도에 고안된 정수 연산만을 사용해 빠르게 선을 그리는 알고리즘
- 중점 (Mid-point) 알고리즘이라고도 함
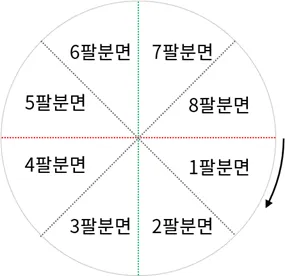
브레젠험 알고리즘 구현 방법
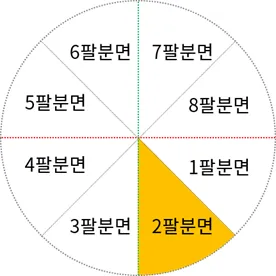
- 화면 공간을 8등분 하고 1 ~ 8 분면 (Octant)으로 나눔
- 직선의 방정식은 다음과 같음
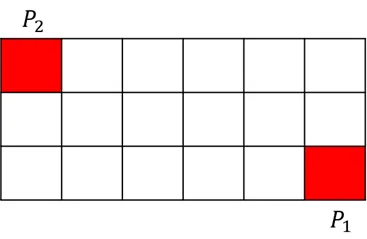
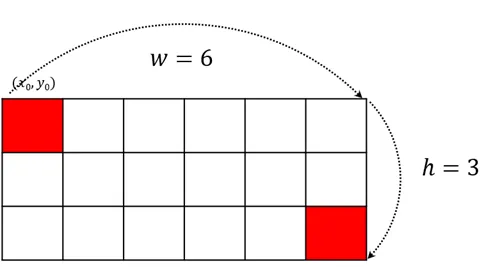
- 정수로 된 스크린 좌표계의 두 점의 좌표가 주어졌을 때 다음 정보가 주어짐
- Width (너비) :
- Height (높이) :
- (시작 점의 좌표)
- 이를 바탕으로 위의 방정식을 변형
- 그렇다면 위의 식은 다음과 같이 전개
- 위의 식을 기본으로 모든 것을 전개
제 1팔분면
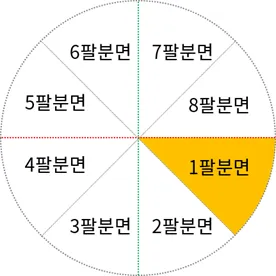
-
해당 영역에서는 기울기가 1을 넘어설 수 없는 특징을 가짐
-
그렇기 때문에 평행이동하거나 1칸 아래로 이동하는 동작만 발생
- 시작점을 찍은 후 다음 점이 평행 이동하는지 한칸 아래로 내려가는지는 중점 값을 보고 판단
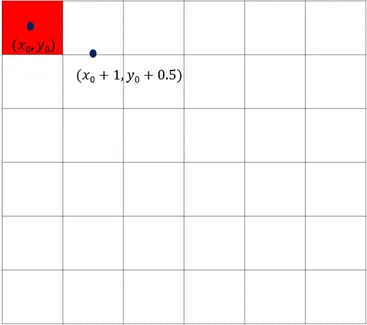
-
직선의 방정식 우변 의 값이 좌변 보다 작다면 위의 픽셀을 선택하고 크면 아래 픽셀을 선택
-
값이 인 경우 얻어지는 값은 다음과 같음
- 이 값과 와 비교한다. 그렇다면 평행 이동하는 경우는 다음과 가틍ㅁ
- 위 수식은 다음과 같이 단순화
- 그 다음 위치 상황에서는 세 점 중 하나를 선택
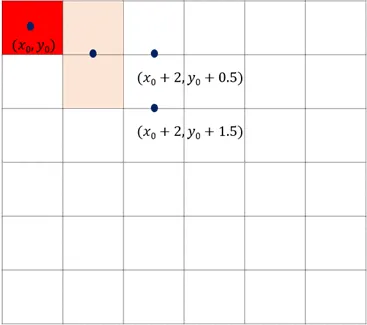
-
이 때에는 두 중점마다 판별식이 달라진다.
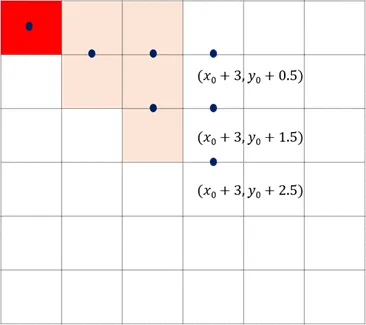
-
그 다음 지점 에는 세 중점이 있고 각각의 판별식은 다음과 같음
-
따라서 가 증가할 때마다 판별 결과에 따라 판별식은 다음과 같이 변화된다고 할 수 있음
- 평행 이동할 때는 만큼 증가
- 아래로 내려갈 때는 만큼 증가
나머지 팔분면의 처리
-
제 2 팔분면은 가 증가하지 않고 를 증가시키는 방향으로 전개
-
와 가 바뀐 상태로 동일하게 알고리즘을 진행하면 되며 판별식은
-
3팔분면은 2팔분면에서 를 거꾸로 증가시키는 형태이고 4팔분면은 1팔분면에서 방향이 반대로 진행되는 것 외에는 동일
-
이전의 알고리즘에서 앞에 다음과 같은 요소를 고려해 보완하면 모든 팔분면의 처리가 가능
- 경사가 완만한가 급격한가?
- 방향과 방향은 양의 방향인가 음의 방향인가?

상상을 구현하는 개발자