위치와 회전, 스케일을 관리하는 컴포넌트 Transform. 어떻게 캐릭터를 움직일지 알아보자
유니티 Transform 메뉴얼
유니티 Transform 스크립트예시
Transform
- 모든 게임오브젝트는 트랜스폼 컴포넌트를 기본적으로 하나씩 가지고 있다. 이는 다른 컴포넌트 들과는 다르게 지울 수 없다. 중복으로 추가 또한 안된다
- 트랜스폼은 게임오브젝트의
위치,회전,크기를 저장하는 컴포넌트
- 게임오브젝트의 부모-자식 상태를 저장하는 컴포넌트
- 유니티는 연산을
4x4행렬로 구현한다. 대학교에서 배웠었던사원수즉,헤밀턴수가 여기서 나온다. - 이동, 스케일은 큰 문제가 없는데 회전에서 약간 문제가 있다.
- 직관적으로 우리는 오일러 각도로 사용하는데, 만약 이를 이용해 회전을 구현하면 짐벌락 현상이 생긴다. 뒤에서 알아보자
- Transform의
프로퍼티는씬 창(직접 잡아서 이동 등),인스펙터 창(직접 값 입력),C# 스크립트(값 지정 또는 수정)에서 바꿀 수 있다.
수학적 원리
-
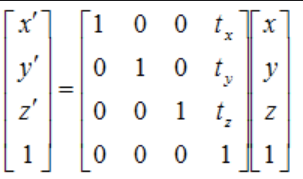
transform은 행렬을 연산해서 구현한다 -
이동
-
회전
-
x 축 회전 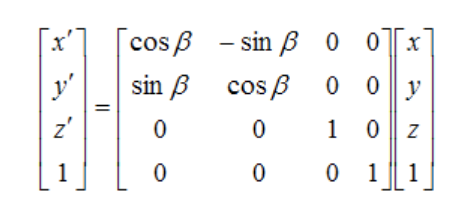
-
y 축 회전 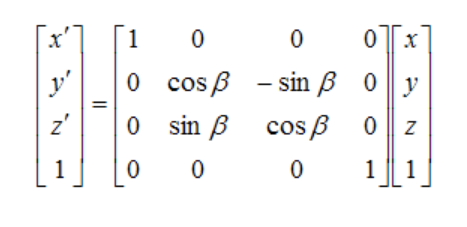
-
z 축 회전 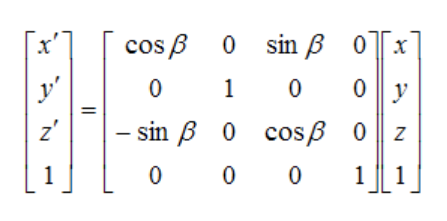
-
스케일
- 스케일은 간단해서 생략한다
Position
- 게임 오브젝트의 좌표는
x,y,z3축으로 이루어져 있다.Vector3로 간단하게 표현 가능하다포지션을 직접적으로 변경하기
Vector3
- Vector3에는 방향 단위 키워드들이 있다. forward,back,up,
Transform.position = new Vector3(x, y, z); // position을 이용한 이동 transform.position += new Vector3(0, 0, moveSpeed * Time.deltaTime); // 직접적으로 좌표 값인 x, y, z를 이용한 이동 transform.Translate(0, 0, moveSpeed * Time.deltaTime);Translate
- 동사 뜻 그대로
옮기다
Transform.Translate(Direction * Speed); // 벡터를 이용한 이동 transform.Translate(Vector3.forward * moveSpeed * Time.deltaTime);- 동사 뜻 그대로
Lerp
- Linear Interpolation
- 선형 보간법을 이용한 이동 방법
- 제논의 역설을 떠올리면 이해가 쉽다
Transform.position = Vector3.Lerp(StartPosition, EndPosition, Interpolation) - 시작점, 목표점, 보간수치(Interpolation) 이다. 보간치는 현재 위치에서 목적지 까지의 거리가 1일때, 0.5면 중간을 반환한다. 즉, 한 프레임마다 거리가 절반씩 줄어드는 식으로 이동한다.
- 보간수치에
deltaTime을 곱할 경우, 1초당 해당 값이 적용된다 - 원리 상으로는 영원히 목적지에 도달하지 못한다 (극한)
MoveTowads
- 목적지를 정해 해당 방향으로 이동시키는 방법
Transform.position = Vector3.MoveTowards(transform.position, Target.Position, Speed);
이동 기준
-
월드 기준
- 절대좌표
transform.Translate(0, 0, 1, Space.World); -
로컬 기준
- 본인(부모) 기준 좌표
transform.Translate(0, 0, 1, Space.Self); -
상대적 기준 (다른 대상)
transform.Translate(0, 0, 1, otherTransform);
DeltaTime
- 프레임을 그리는 시간 단위다. 예를들어 한 프레임 이후 다음 프레임을 그려내는데 0.02초 걸렸다면, 해당 프레임의
DeltaTime은 0.02가 된다 - 60프레임이면 DeltaTime은 한 프레임당 1/60초가 된다. 30프레임이면 1/30초
- 유니티 엔진의
업데이트는 한 프레임마다 수행된다
예시) 물체의 이동
transform.Translate(Vector3.forward * 0.1f);- 이는 60프레임이면 60번, 30프레임이면 30번 수행된다. 같은 1초 기준으로 60프레임이면 6만큼, 30프레임이면 3만큼 움직이게 되는거다. 이 문제를 해결하기 위해
DeltaTime을 곱해줘야한다
DeltaTime 사용
transform.Translate(Vector3.forward * 0.1f * Time.deltaTime);- 이 경우 60프레임이면 DeltaTime은 1/60초, 1초동안 움직이는 거리는
- 30프레임이면 DeltaTime은 1/30초, 1초동안 움직이는 거리는 이다
- DeltaTime을 쓰면 몇 프레임이든 같은 값으로 출력 할 수 있다
DeltaTime의 특징
- 오차범위는
float만큼의 오차가 있음 DeltaTime의 값이 갱신되는 방법은 유니티의 라이프 사이클에서 알아볼 수 있음.Update직전에 갱신됨
DeltaTime 예시
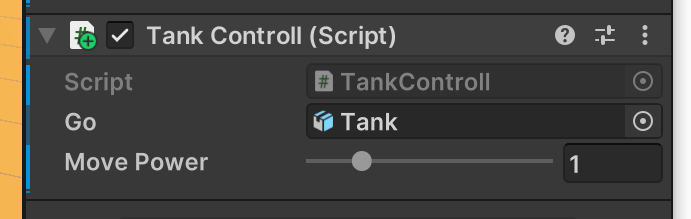
public class TankControll : MonoBehaviour
{
[SerializeField] GameObject go;
[Range(0,5)]
[SerializeField] float movePower;
void Update()
{
if(Input.GetKey(KeyCode.Space))
{
go.transform.Translate(transform.forward * movePower * Time.deltaTime);
}
}
}Space를 누르면,movePower만큼 탱크가 움직인다
사이드얘기
- 그래서 원래 일전에 했던 공굴리기의 경우,
AddForce를 하는 것은 바람직 하지 않음. AddForce의 경우FixedUpdate()에서 쓰는것이 권장된다
Rotation
오일러 각을 그대로 쓰기에는 짐벌락 현상이 생긴다. 쉽게말하자면, 물체를 돌리다 보면 축이 서로 겹치는 경우가 생긴다.x,y축이 겹쳤을때,x축 방향으로는 돌릴 방법이 사라지는 경우가 생기는거다- 유니티 내부적으로는
쿼터니언(사원수,헤밀턴수)으로 회전을 구현한다. 해당 내용은 대학교에서수의 체계를 배울 때 있던 내용으로, 관련 내용을 배워보지 못한 학생들은 직관적으로 이해할 수 없다
사원수 원리
- 가장 중요한 개념은 아래와 같다
- 사원수(헤밀턴 수) :
사원수라고 하는데, 여기에 이제오일러 등식과 함께 사용하면 각도를 표현할 수 있게 된다- 오일러 항등식 :
Unity의 Quaternion & Euler
-
Quaternion
- 각
x,y,z에 각도(방향)을 저장한다. 회전 시 새로운 방향을 연산하여 저장 - 장점 : 기하학으로 회전하니
짐벌락안생김 - 단점 :
사원수를 이해하기 어렵고 직관적이지 않음
- 각
-
EulerAngle
- 3 축을 기준으로 수치만큼 회전시키는 방법
- 장점 : 직관적으로 계산가능
- 단점 :
짐벌락현상이 발생함
-
Quaternion을 통해 회전각도를 계산하는 것은 직관적이지 않고 이해하기 어려움 -
유니티의 경우
Quaternion과Eular의 변환 함수를 지원하므로 필요에 따라 변환하여 사용 -
변환 함수
Quaternion quaternion; Vector3 euler; quaternion = transform.rotation;transform의 회전 값은 Euler 각도 표현이 아닌 Quaternion을 사용함
-
변환 방법
- Euler를 Quaternion으로 변환
euler = quaternion.eulerAngles; - Quaternion을 Euler로 변환
quaternion = Quaternion.Euler(euler);
- Euler를 Quaternion으로 변환
회전직접 지정
rotation에 값을 직접 지정해 회전하는 방법Euler를 이용해Quaternion을 변환하여 사용 권장
Transform.rotation = Quaternion.Euler(x, y, z);회전 함수
Rotate
- Rotate 함수를 이용한 회전
- 축을 기준으로 회전
Transform.Rotate(Vector3.up, Speed);// 축을 이용한 회전 (축을 기준으로 시계방향으로 회전) transform.Rotate(Vector3.up, rotateSpeed * Time.deltaTime); // 오일러를 이용한 회전 transform.Rotate(Vector3.up * rotateSpeed * Time.deltaTime); // rotation을 이용한 회전 transform.Rotate(0, rotateSpeed * Time.deltaTime, 0);RotateAround
- RotateAround를 이용한 중심 축 기준으로 회전
- 한 지점을 정해, 그 지점을 기준으로 회전한다. 궤도운동을 구현할 때 쓸 수 있다
Transform.RotateAround(Target.position, Vector3.up, Speed);LookAt
- LookAt을 이용한 대상을 향해 회전시키기
- Target으로 지정한 지점을 바라본다
Transform.LookAt(Target.position);Quaternion 보간
- 보간수치를 넣어 회전시킬 수 있다
Quaternion도Lerp가 있다
Vector3 targetDir = (target.position - transform.position).normalized; Quaternion targetRot = Quaternion.LookRotation(targetDir); transform.rotation = Quaternion.Lerp(transform.rotation,targetRot,rate);
트랜스폼 회전 공간
- 게임오브젝트를 회전하는 데 있어, 월드의 절대 좌표(
월드 스페이스), 상속 관계에서의 상대 좌표(로컬 스페이스)를 사용할 수 있다
World Space & Local Space
World Space
- 절대좌표. 고정된 좌표계다
- 오브젝트는 각각 월드 포지션(World Position), 월드 회전(World Rotation), 월드 스케일(World Scale)을 가짐
Local Space
- 오브젝트 각각의 좌표계. 부모-자식관계이면, 부모가 기준인 좌표계
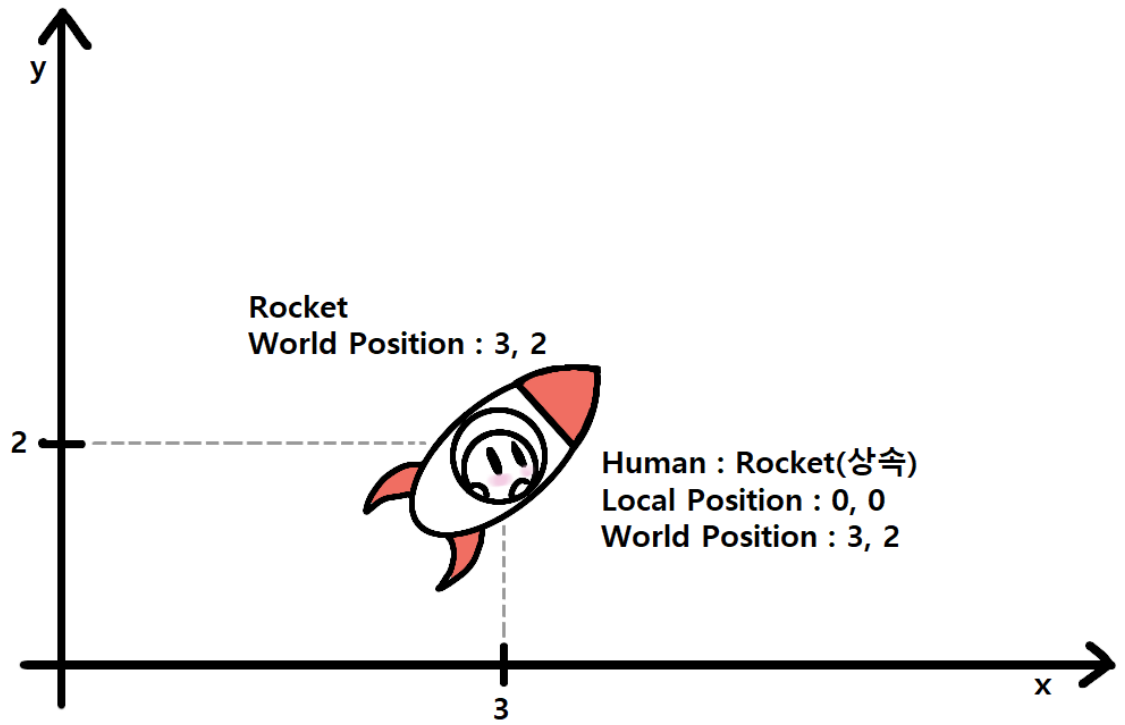
- 자식 오브젝트의 로컬 포지션이 (0, 0, 0)이면,
부모.position = 자식.position - 오브젝트는 각각 로컬 포지션(Local Position), 로컬 회전(Local Rotation), 로컬 스케일(Local Scale)을 가짐
예시
- 부모는
월드를 기준으로 좌표와 각도 값을 가지는데, 자식은 부모를 기준(로컬)으로 좌표와 각도 값을 가진다
| 부모 |
|---|
 |
| 자식 |
|---|
 |
기준에 따른 회전 방법
월드를 기준으로 회전
transform.Rotate(0, 0, 1, Space.World);로컬을 기준으로 회전
transform.Rotate(0, 0, 1, Space.Self);위치를 기준으로 회전
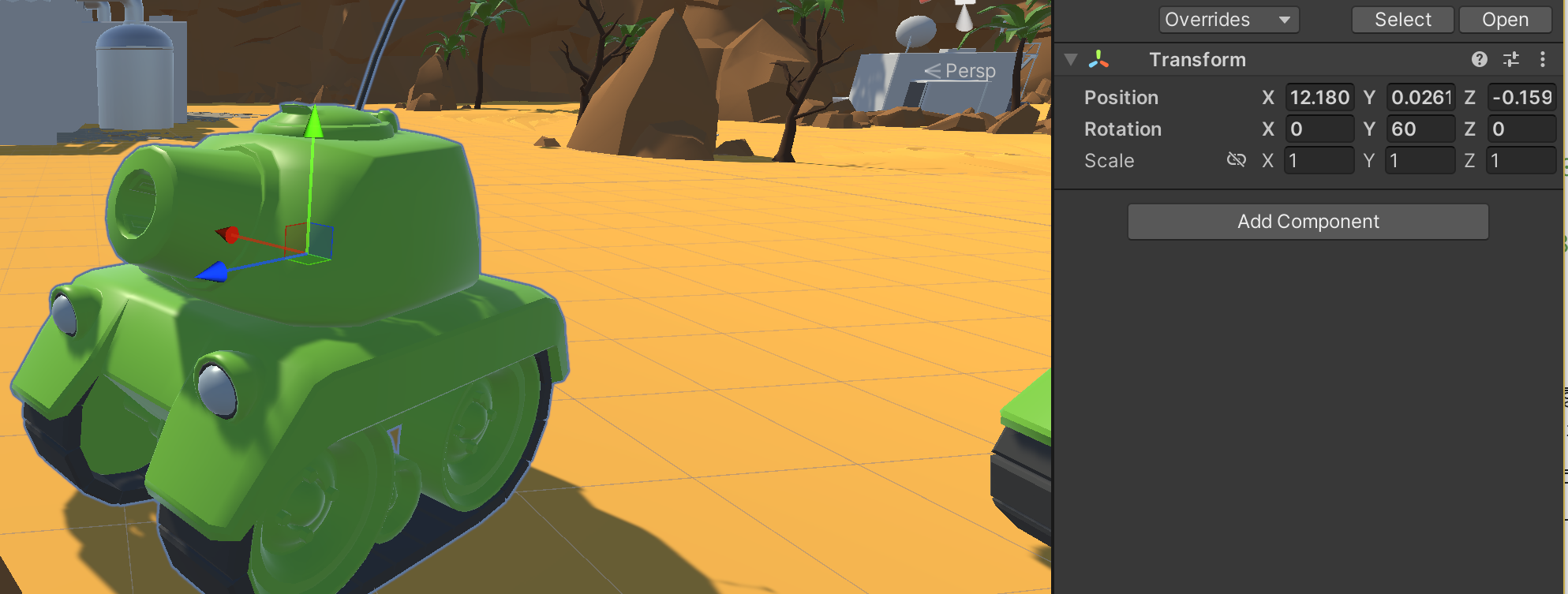
transform.RotateAround(otherTransform.position, Vector3.up, 1);예시) 탱크회전ㄴ
[SerializeField] Transform tank;
[SerializeField] Transform turret;
[SerializeField] float turret;
turret.rotation = Quaternion.identity; // 북쪽, 월드기준이라서 탱크를 회전시켜도 포탑은 고정된다
rotate -= 30*Time.deltaTime;
tank.rotation = Quaternion.Euler(0,rotate,0); // 월드 기준으로 rotate 만큼 회전시킨다
turret.localRotation = Quaternion.Euler(0,rotate,0); // 로컬기준으로 돌아간다. 탱크의 회전 각만큼 값이 더해진다Translate와의 응용
월드를 기준으로 방향을 정해 이동시키는 방법이다- 기존에 쓰던 것처럼
Spalce.World를 생략하면,Space.Self(로컬)로 된다.
transform.Translate(Vector3.forward * Time.deltaTime, Space.World);Rotate 사용 예시
Space.World를 추가하면, 오브젝트의 정수리가 아닌, 월드기준 윗 방향을 축으로 회전한다
transform.Rotate(Vector3.up,60,Space.World);
Transform의 부모-자식 관계
트랜스폼은 부모-자식관계 구현 가능- 트랜스폼에게 부모 트랜스 폼이 있으면, 부모 트랜스폼의
위치,회전,크기 변경이 같이 적용됨 - 이를 이용하여 계층적 구조를 구현하기 좋음
하이라키창에서드래그 & 드롭을 통해 부모-자식 상태를 변경할 수 있음
// 트랜스폼의 부모 설정
transform.parent = otherTransform.parent;
// 부모를 기준으로한 트랜스폼
Vector3 localPosition = transform.localPosition; // 부모트랜스폼이 있는 경우 부모를 기준으로 한 위치
Quaternion localRotation = transform.localRotation; // 부모트랜스폼이 있는 경우 부모를 기준으로 한 회전
Vector3 localScale = transform.localScale; // 부모트랜스폼이 있는 경우 부모를 기준으로 한 크기
// 트랜스폼의 부모가 null인 경우 월드를 기준
transform.parent = null;
// 월드를 기준으로한 트랜스폼
Vector3 worldPosition = transform.position; // 월드를 기준으로 한 위치
Quaternion worldRotation = transform.rotation; // 월드를 기준으로 한 회전
// Vector3 worldScale = transform.localScale; // 부모를 기준으로 한 크기
개발 박살내자