이번 포스트에서는 Coordinate system에 대해서 알아보겠습니다.
1) Coordinate System
Coordinate system은 우리가 좌표평면이나 좌표공간에서 점을 표시할 때 쓰는 순서쌍과 관련이 있습니다. 이전 basis 포스트에서 좌표평면, 좌표공간에서의 x,y,z축이 basis에 속하는 벡터의 방향을 나타내는 것을 확인했었습니다. 좌표평면/공간 위의 점을 x,y,z 축을 이용하여 순서쌍으로 나타내는 것이구요. coordinate system은 basis를 이용하여 벡터를 순서쌍(후에 coordinate vector로 정의합니다.)으로 나타내는 방법에 대한 내용입니다.
Coordinate system을 정의하기 위해서는 다음의 정리가 필요합니다.
Theorem : The uniqueness representtion theorem
Let B={b1,b2,...,bn} be a basis for a vector space V. Then for each x in V, there exists a unique set of scalars c1,...,cn such that
x=c1b1+...+cnbn
위 정리가 의미하는 것은 다음 두 가지입니다.
- V의 모든 vector는 basis 원소의 linear combination으로 표현 가능합니다.
- Linear combination으로 표현할 때, unique하게 표현됩니다.
Definition : Coordinate
Suppose B={b1,b2,...,bn} is a basis for V and x is in V. The coordinates of x relative to the basis B(or the B-coordinate of x) are the weights c1,...,cn such that x=c1b1+...+cnbn
If c1,...,cn are the B-coordinate of x, then the vector in Rn
[x]B=⎣⎢⎢⎢⎢⎡c1c2⋮cn⎦⎥⎥⎥⎥⎤
is the coordinate vector of x, or the B-coordinate vector of x
The mapping x→[x]B is the coordinate mapping (determined by B)
x를 basis에 속한 벡터들의 linear combination으로 표현하였을 때, 각각의 basis에 속하는 벡터 b1,...,bn의 계수들을 B-coordinate of x라고 합니다. 이 B-coordinate를 벡터로 나타낸 값이 B-coordinate vector of x이고, [x]B라고 합니다.
마지막으로, x에서 x의 B-coordinate vector [x]B로 보내는 mapping을 Coordinate mapping이라고 합니다.
x 를 basis에 속한 벡터와 [x]B 로 나타내면
x=c1b1+⋯+cnbn=[b1...bn]⎣⎢⎢⎡c1⋮cn⎦⎥⎥⎤=[b1...bn][x]B
가 됩니다.
example
Consider a standard basis ϵ={e1,e2}, and a basis B2={b1,b2} for R2, where e1=[10], e2=[01], b1=[10], b1=[12]
R2에 존재하는 벡터 x의 B2-coordinate vector가 [x]B2=[−23]입니다. 이 말은
x=−2b1+3b2
를 뜻하고, 이를 계산하면
x=−2[10]+3[12]=[16]
이 됩니다. 이 때 [16]은
[16]=1e1+6e2
가 되어, xϵ을 뜻합니다.
이를 좌표평면을 통해 시각적으로 표현하면 다음과 같습니다.
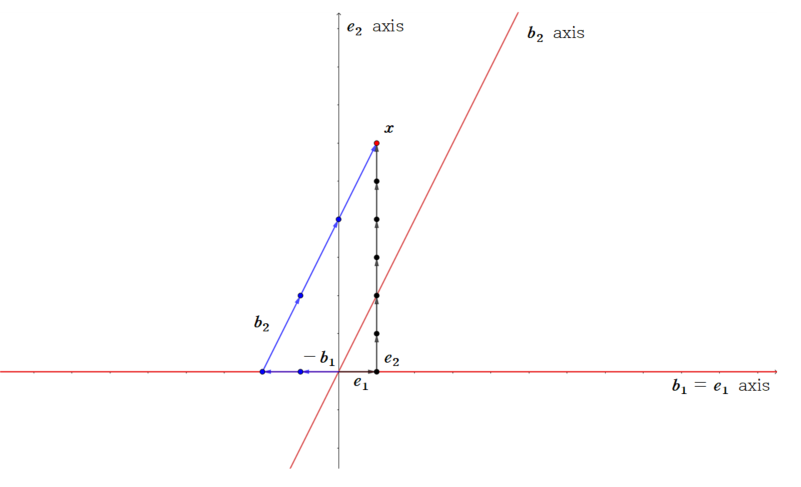
다음 좌표평면에서 기본 x,y축(가로축, 세로축)이 ϵ basis 축을 나타낸 것입니다.(검은색 축) 한편, 빨간색 축은 B2 basis를 축으로 나타낸 것입니다. (가로축이 b1, 대각선 축이 b2) x는 좌표평면 상 빨간색 점이고, 이를 ϵ basis로 나타낼수도, B2 basis로 나타낼 수 있습니다.
x를 ϵ basis로 나타낸 것이
[16]=1e1+6e2
입니다. 검은색 벡터(화살표)로 표시하였습니다.
그리고 x를 B2 basis로 나타낸 것이
[16]=−2b1+3b2
입니다. 파란색 벡터(화살표로 표시하였습니다.)
이 때, [x]B2 이 뜻하는 바는 다음과 같습니다. 만약 우리가 좌표평면을 ϵ을 이용하여 표시하는 것이 아닌 (x축, y축) B2를 이용하여 표현한다고 생각해봅시다.(빨간색 축) x를 빨간색 축을 기반으로 하여 나타낸 순서쌍이
[x]B2=[−23]
이 됩니다. (b1 방향과 크기로 -2, b2 방향과 크기로 3의 값을 가지는 점이 x입니다.)
즉, B-Coordinate vector는 B를 이용하여 vector space의 벡터를 표현할 때의 순서쌍(좌표)을 의미합니다.
example
ϵ1 basis의 coordinate vector를 생각해봅시다.
x=1e1+6e2=[e1e2][16]=I2[16]
다음과 같이 표현할 수 있기 때문에
[x]ϵ=[16]=x
인 것을 알 수 있습니다.
이는 Rn에서도 똑같이 적용됩니다.
Rn에서의 standard basis ϵ={e1,...,en}에 대해서 x의 ϵ-coordinate vector는
x=x1e1+...+xnen=[e1...en]⎣⎢⎢⎡x1⋮xn⎦⎥⎥⎤=In[x]ϵ=[x]ϵ
즉
[x]ϵ=x
인 것을 알 수 있습니다.
2) Coordinate mapping
(1) Coordinates in Rn
Vector space의 basis B를 알면, 특정 x의 B-coordinate vector는 쉽게 구할 수 있습니다.
B={b1,...,bn}이 어떤 Rn의 basis라고 가정해봅시다. [x]B를 구하기 위해서는
x=c1b1+⋯+cnbn=[b1...bn][x]B
위 식을 만족해야 합니다. 이 때 matrix [b1...bn]=PB라고 하면
PB[x]B=x
의 solution을 구하면 됩니다. 이 때, P의 column이 Rn의 basis이므로 linearly independent하므로, P는 invertible합니다. 따라서
[x]B=PB−1x
임을 알 수 있습니다.
(2) Coordinate mapping
Rn에 속하는 vector x의 B-coordinate vector는 다음의 식을 통해 구할 수 있었습니다.
PB[x]B=x
P가 invertible하므로
[x]B=PB−1x
임을 알 수 있습니다.
첫 번째 식을 살펴봅시다. x의 B-coordinate vector에 PB matrix를 곱해서 x를 얻을 수 있었습니다. 그런데, x=[x]ϵ, 즉 standard basis의 coordinate vector가 x인 것을 이용하면, 첫 번째 식은 B-coordinate vector를 standard basis coordinate vector로 바꿔주는 matrix transformation으로 생각할 수 있습니다.
T[ϵ]:[x]B→xT[ϵ]([x]B)=PB[x]B=x
한편, 두 번째 식은 x에 PB−1를 곱해서 [x]B를 얻는 식입니다. 즉, standard basis coordinate vector를 B-coordinate vector로 바꿔주는 matrix trasformation으로 생각할 수 있습니다.
T[B]:x→[x]BT[B](x)=PB−1x=[x]B
즉, coordinate vector를 만드는 mapping은 linear operator이고, one to one입니다.
여기서 정의된
PB=[b1...bn]
을 change of coordinates matrix form B to the standard basis in Rn 이라 정의합니다.
Theorem
Let B={b1,...,bn} be basis for a vector space V. Then the coordinate mapping x→[x]B is a one-to-one linear transformation from V onto Rn.
위 정리는 Rn의 subspace 뿐만 아니라 일반적인 vector space V에 대한 coordinate mapping이 linear transformation이면서 one-to-one이 된다는 것을 뜻합니다. 일반적인 vector space V에 대해 coordinate mapping을 하기 때문에 정의역은 V, 공역은 Rn인 것을 알 수 있습니다. 만약 vector space V가 직관적으로 알기 쉽지 않는 경우, basis를 알고 있다면 coordinate mapping을 통해 보다 친숙한 Rn vector space에서 해석할 수 있습니다. 따라서 coordinate mapping은 일반적인 vector space에 속한 벡터를 Rn으로 바꾸어주는 mapping입니다. (증명은 appendix 참고)
위 정리를 이용하면 하나의 벡터 뿐만 아니라 여러 벡터들의 linear combination에 대해서도 coordinate mapping이 가능합니다. coordinate mapping이 linear transformation이기 때문입니다.
u1,...,up∈V, c1,...,cp∈R 에 대해서
[c1u1+⋯+cpup]B=c1[u1]B+⋯+cp[up]B
가 성립합니다.
지금까지 coordinate system에 대해 알아보았습니다. 다음 포스트에서는 change of basis에 대해서 알아보겠습니다. 질문이나 오류 있으면 댓글로 남겨주세요! 감사합니다!
Appendix : Proof of theorem
Theorem
Let B={b1,...,bn} be basis for a vector space V. Then the coordinate mapping x→[x]B is a one-to-one linear transformation from V onto Rn.
위 정리에 밝혀야할 것은
- Coordinate mapping is linear transformation
- Coordinate mapping is one to one
- Coordinate mapping is onto
세 가지입니다.
B={b1,...,bn}
를 V의 basis라 하고, coordinate mapping TB를
TB:V→RnTB(x)=[x]B
다음과 같이 정의합니다. TB가 linear transformation인 것을 밝히기 위해 vector addition, scalar multiple 조건을 만족하는지 확인하면 됩니다.
v,u∈Vv=c1b1+⋯+cnbnu=d1b1+⋯+dnbn
이 되고,
[v]B=⎣⎢⎢⎡c1⋮cn⎦⎥⎥⎤, [u]B=⎣⎢⎢⎡d1⋮dn⎦⎥⎥⎤
임을 알 수 있습니다. 이 때
v+u=(c1+d1)b1+⋯+(cn+dn)bn
이 되어
TB(v+u)=[v+u]B=⎣⎢⎢⎡c1+d1⋮cn+dn⎦⎥⎥⎤=⎣⎢⎢⎡c1⋮cn⎦⎥⎥⎤+⎣⎢⎢⎡d1⋮dn⎦⎥⎥⎤=[v]B+[u]B=TB(v)+TB(u)
따라서 addition 조건을 만족합니다. 다음으로 v와 scalar k에 대해서
kv=kc1b1+⋯+kcnbn
이므로
TB(kv)=[kv]B=⎣⎢⎢⎡kc1⋮kcn⎦⎥⎥⎤=k⎣⎢⎢⎡c1⋮cn⎦⎥⎥⎤=k[v]B=kTB(v)
을 만족하므로, TB는 linear transformation입니다.
TB가 linear transformation이므로, TB가 one to one임을 밝히는 것은 Ker(TB)={0}임을 밝히는 것과 같습니다. TB의 kernel은
Ker(TB)={x∈V∣TB(x)=0}
이를 확인하기 위해
TB(x)=[x]B=0
을 만족하는 x는
x=0⋅b1+⋯+0⋅bn=0
즉 zero vector밖에 존재하지 않습니다. 따라서
Ker(TB)={0}
을 만족하기 때문에 TB는 one to one 입니다.
(one to one의 정의를 통해서도 증명할 수 있습니다.)
Rn에 있는 임의의 vector a에 대해서
TB(x)=a
를 만족하는 x가 V에 적어도 하나 존재해야 함을 밝혀야 합니다. a를
a=⎣⎢⎢⎡a1⋮an⎦⎥⎥⎤
이라 한다면,
x=a1b1+⋯+anbn
인 x에 대해서
TB(x)=[x]B=a
를 만족합니다. 따라서 임의의 a∈Rn에 대해서
TB(x)=a
를 만족하는 x가 반드시 존재하므로, TB는 onto입니다.
