Convolutional Neural Network
Fully-Connected Layer의 문제점
1. 변형(이동)되면 인식 못하는 경우
2. 이미지의 모든 pixel간의 feature 추출
-
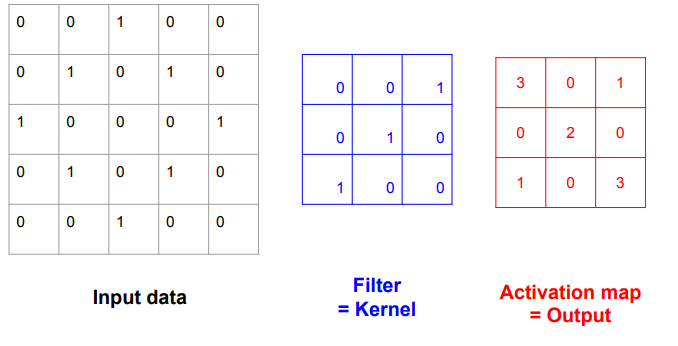
Filter(Kernel): 이미지의 특징을 찾아내기 위한 파라미터
-> Filter 이용해서 convolution 연산
-> Filter를 어떻게 주느냐에 따라 얻어내는 결과물이 다르다.
-> Filter 모양의 feature 추출
-> n개의 Filter가 적용된다면 output data는 n개의 채널을 가짐 -
Stride: sliding 간격
-
Activation Map(=Feature Map)
-> Convolution layer의 최종 출력 결과
-> filter가 찾은 특성이 얼마나 있는지 지도처럼 압축해서 표현
-> filter 개수 = output activation map의 depth
Convolutional Layer
Convolutional Layer의 Filter 개수, Filter의 Stride, Padding 적용 여부, Pooling 종류에 따라서 출력 데이터의 shape이 변경된다.
- 연산
Padding
Convolution layer에서 Filter와 Stride의 작용으로 output size가 input size보다 줄어든다.
-> Padding: output size가 줄어드는 것을 막기 위해 input data의 외곽을 특정 값으로 덧대준다.
Pooling
-Max Pooling: 설정한 pool_size 안에서 가장 큰 값으로 downsampling
-Average Pooling: 설정한 pool_size 내부 값의 평균값으로 downsampling
