본 포스팅은 David Silver 교수님의 강화학습 강의와 그 강의를 정리한 팡요랩 강의를 바탕으로 정리한 것입니다.
Planning이란?
→ Environment; MDP를 알고 있을 때 더 나은 policy를 찾아나가는 과정
1. Dynamic Programming
1.1 Dynamic Programming 이란?
⚙ Dynamic Programming
- Dynamic : sequential or temporal component to the problem
- Programming : optimising a “program”
하나의 큰 문제를 바로 해결하기 힘들 때, 여러개의 작은 부분 문제들로로 문제를 나누고 부분 문제들의 해를 모두 구한 뒤에 그 해를 이용해서 더 큰 크기의 부분 문제를 해결하는 과정을 거쳐 문제를 해결하는 하나의 방법론
1.2 Dynamic Programming의 요구조건
-
Optimal substructure : 하나의 큰 문제에 대한 solution은 여러개의 작은 부분문제들의 solution으로 분할 할 수 있어야 한다.
-
Overlapping subproblems : 어떤 부분문제의 해는 상위의 부분문제를 해결하기 위하여 여러번 사용될 수 있다. 따라서 보통 부분문제의 해들을 저장해두고 가져와서 이용한다.
⇒ Markov decision processes satisfy both properties!- Bellman equation은 재귀적으로 표현된다.
- value function이 계산한 value는 저장해두었다가 Policy를 평가/갱신하기 위해 사용된다.
1.3 Planning by DP
-
DP를 이용하여 planning을 수행할 때는, MDP에 대한 모든 정보를 알고있다고 가정한다.
[1] MDP의 정보- state transition probability
- reward
-
강화학습 문제의 종류에 따른 표현
-
prediction
MDP와 policy가 주어졌을 때, 그 policy를 따라 Agent가 수행했을 때의 value function을 계산하는 문제
- input : MDP (=or )
- output : value function
[2] 이때 주어지는 Policy는 optimal policy여야하는 조건같은건 가지고 있지 않는다.
-
control
MDP가 주어졌을 때, optimal value function, policy를 찾는 문제
- input : MDP
- output : optimal value function , optimal policy
-
2. Policy Evaluation
Policy가 고정되어있을 때, value-function을 게산하는 과정
2.1 Iterative Policy Evaluation
- 문제 정의
-
problem : 주어진 어떤 policy 를 평가하는 것, 즉 policy를 따랐을 때의 value function 를 찾는 것을 목적으로 한다. [prediction]
-
solution : Bellman expectation equation을 이용하여 iterative한 방법을 적용한다.
-
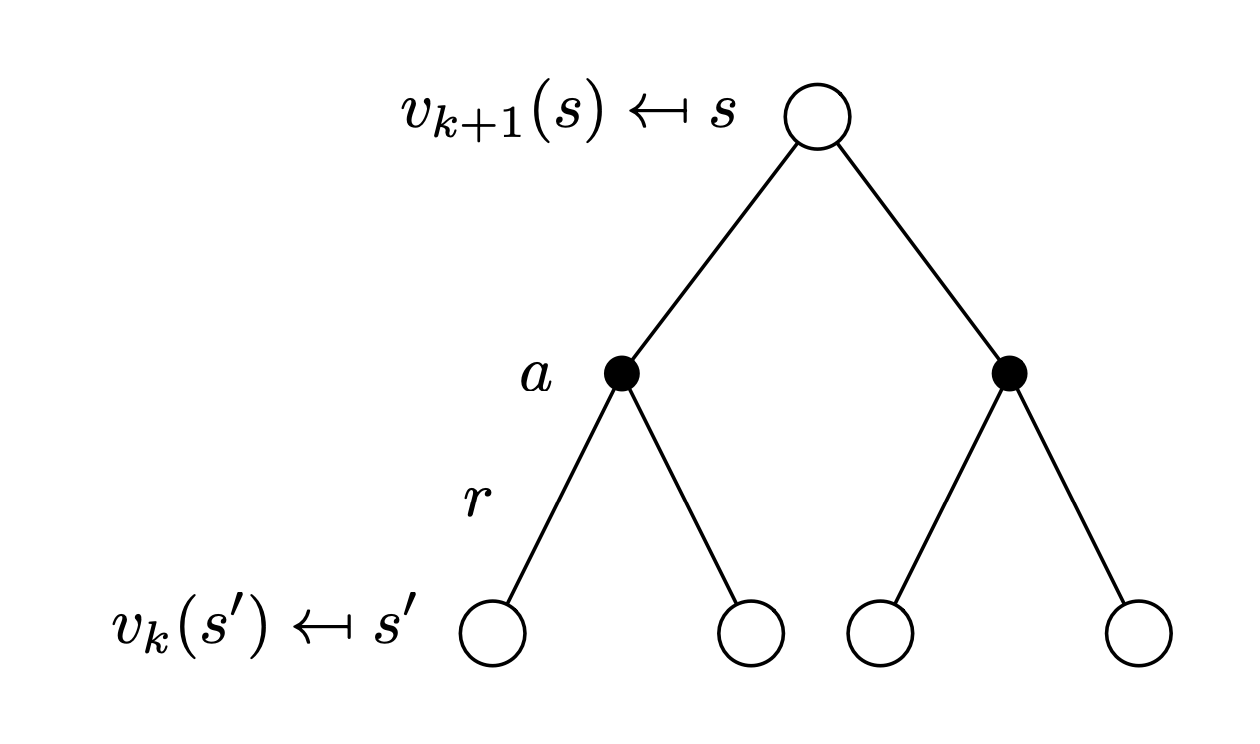
- synchronous backup
-
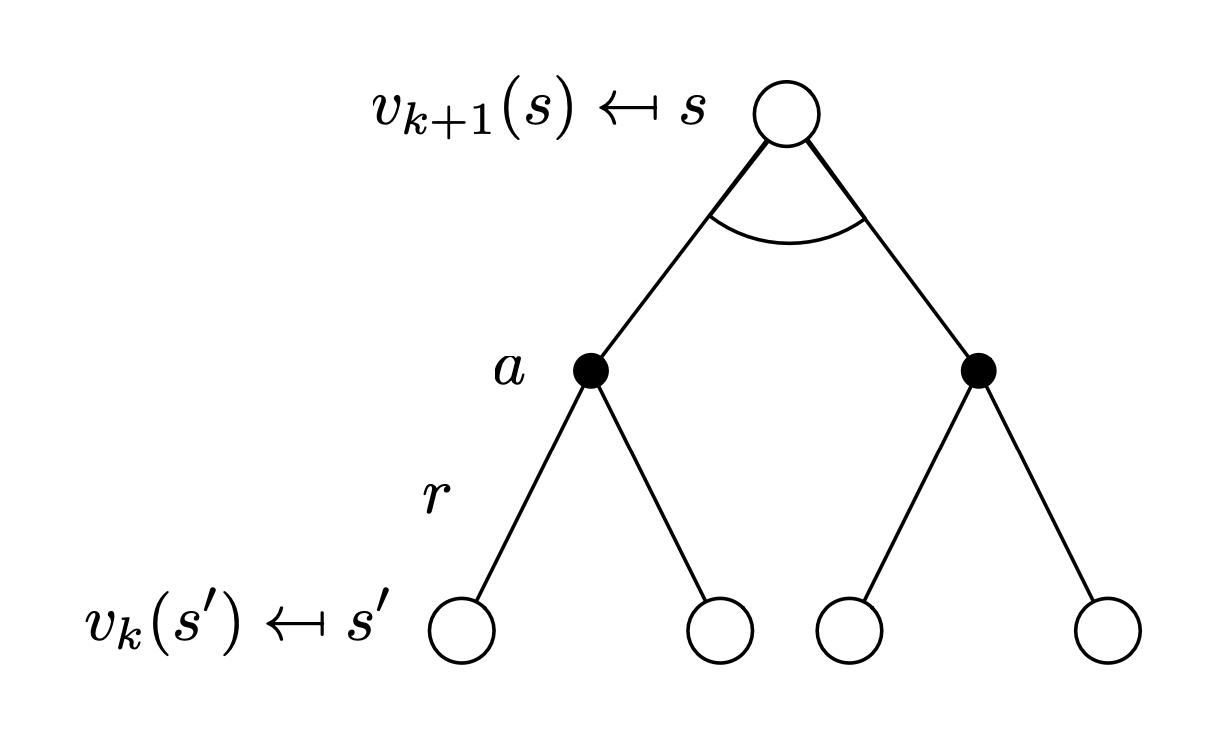
eachiteration k+1-
forall states-
update from
→ 전 단계 에서의 value f를 이용하여 현재 단계 에서의 value를 갱신한다.
(where 는 에서 갈 수 있는 가능한 모든 state)
-
→ 이 과정을 반복하면 에 수렴하게 된다.
-
-
-
Bellman Expectation Equation
- 단계에서는 단계에서보다 더 정확한 value 값을 가지게 하고 싶어한다.
- evaluate하는 state 에서 갈 수 있는 가능한 모든 state 에서의 value를 사용하여 갱신해준다.
- next state의 value일수록 지금까지 policy를 따라 진행하면서 실제로 얻은 정확한 reward 의 값이 더 많이 존재하기 때문에 점점더 정확한 value를 가지게 된다.
- 따라서 가장 초기 init 상태일 때의 value function의 값은 모두 정확하지 않더라도 정확한 값인 “reward”가 고려되기 때문에 최종적으로 에 수렴할 수 있게 된다.
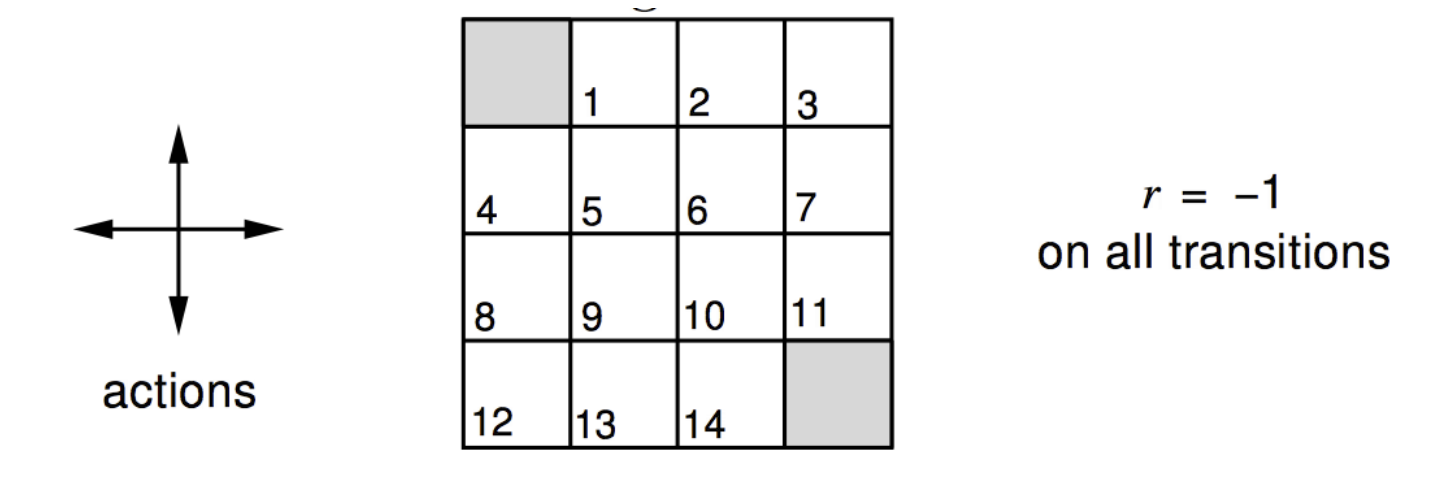
2.2 Example with Gridword
-
*Gridworld for prediction
- MDP
-
1~14는 nonterminal state이고, 왼쪽 위 또는 오른쪽 아래에 하나의 terminal state를 가진다.
-
(미래지향적)
-
terminal state에 도달하기 전까지 항상 의 reward를 받는다.
-
- random policy
- MDP
-
Iterative Policy Evaluation
-
ex)
일 때 6번 state의 갱신과정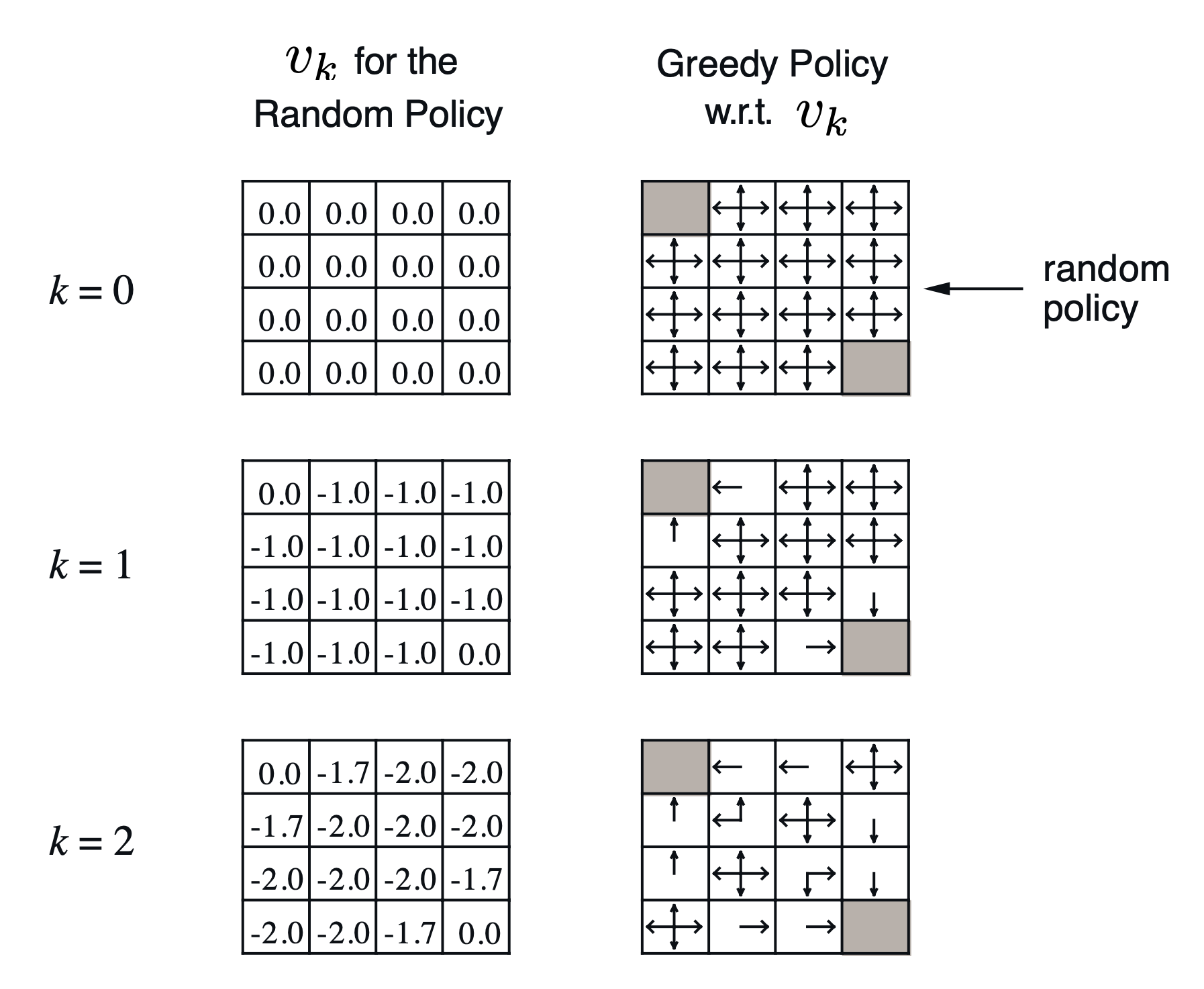
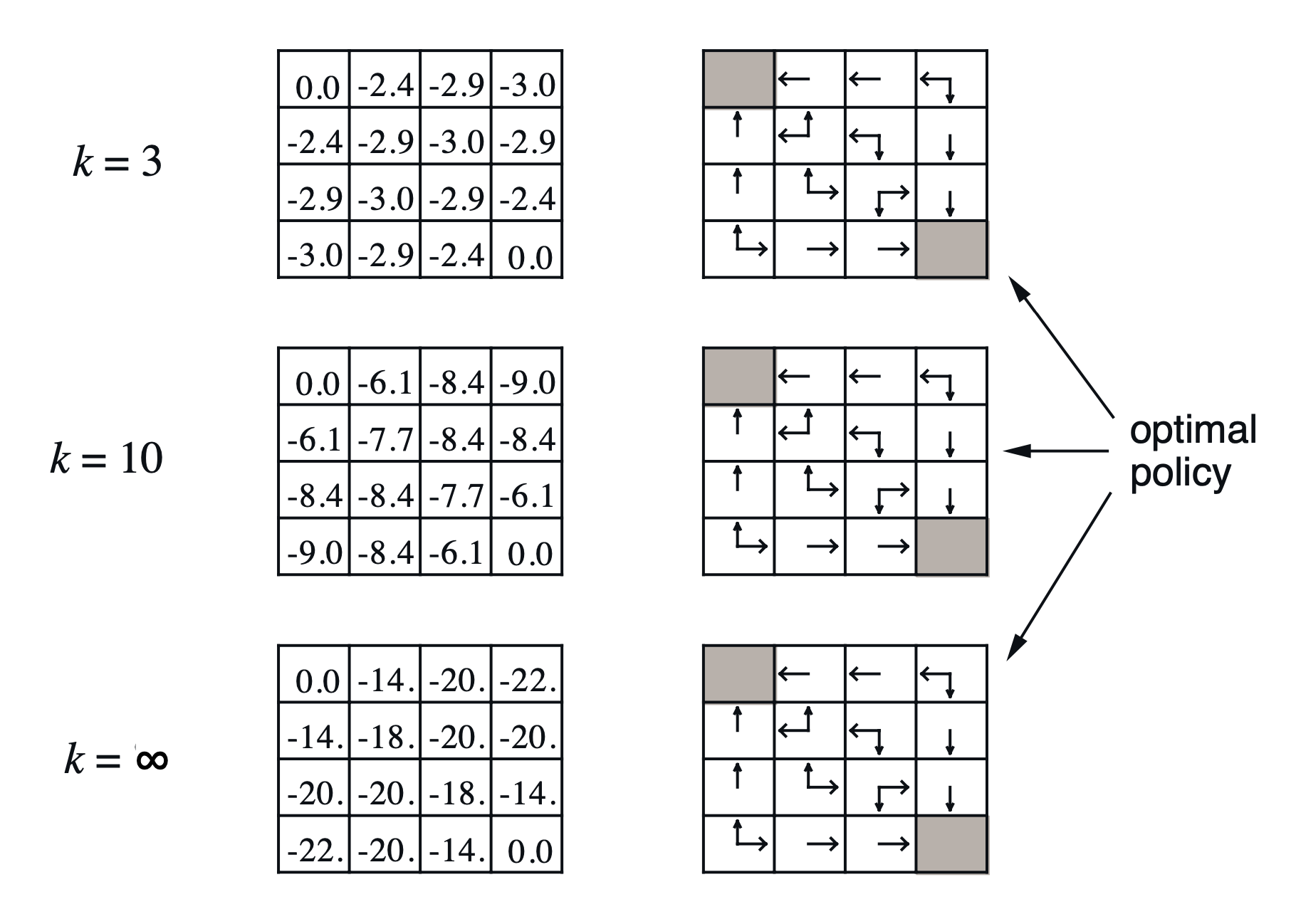
🤖 (이 예시에서는) 멍청한 policy를 기반으로 value function의 값을 계산하였는데, 계산된 value function에 대하여 value가 가 되게하는 action만 항상 그리디하게 선택하는 policy를 따랐더니 optimal policy가 되었다!
→ 더 나은 policy를 찾을 수 있다. [policy 개선의 아이디어]
-
3. Policy Iteration
Iterative한 방법을 사용하여 policy기반으로 최적의 policy를 찾는 과정
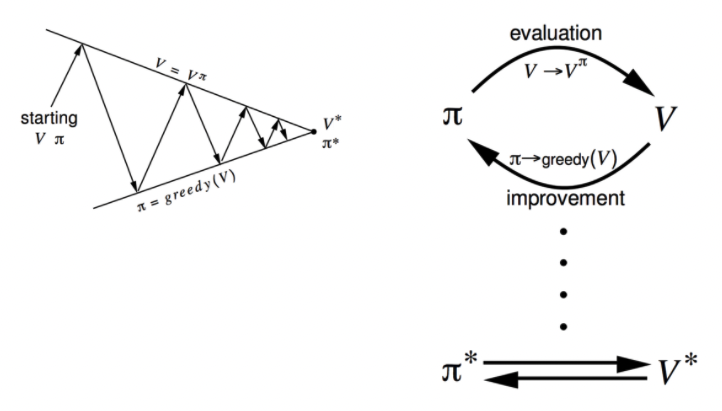
3.1 Policy 개선의 원리
- Evaluate the policy (=policy evaluation)
- Improve the policy⇒ Evaluate와 Improve를 반복해서 수행하면 점점 policy가 optimal policy 에 수렴하게 된다!
3.2 Policy Iteration
Policy 개선 과정
초기 policy 를 평가 [evaluation]
계산된 value function에 대하여 greedy하게 선택하는 새로운 policy 로 policy를 개선 [improvement]
개선된 policy 를 다시 평가 [evaluation]
3.3 proof of policy Improvement
- . greedily하게 행동하는 새로운 policy는 항상 이전의 policy보다 개선되는가?
-
어떤 deterministic한 policy, 가 있다고 하자.
[1] 어떤 state에서 어떤 action을 할 지 명확하게 정의된 policy → 확률 분포가 아님
-
greedily하게 행동하는 새로운 policy를 정의함으로서 우리는 policy를 improve시킬 수 있다
-
one-step에 대한 policy improve 증명
*notation
: 를 따라서 1-step을 수행하고 그 이후로도 계속 \pi를 따랐을 때의 action-value
: 를 따라서 1-step을 수행하고 그 이후에는 \pi를 따랐을 때의 action-value
- 에서의 state-value는 에서 policy에 의해 결정된 action 을 수행했을 때의 action-value와 동일하다. (action-value function의 정의상 자명함)
- policy가 결정한 action을 했을 때의 value는 value가 최대가 되도록하는 action을 했을 때의 value보다는 절대로 크지는 않을 것이다.
- 그런데 greedily policy의 정의에 따라 이 값은 greedily policy에 의해 결정된 action 을 수행했을 때의 action-value와 동일하다.⇒ one-step이라도 를 따라 진행했을 때의 action-value가 기존 policy를 따랐을 때의 value보다 항상 같거나 크다.
-
value function에 대한 증명
- one-step일 때 증명한 것에 따라서 이다.
- Q-function의 정의에 의하여 아래와 같이 expectation 공식으로서 나타낼 수 있다.
- one-step일 때 증명한 내용 (1)을 다시 적용하면 아래와 같이 표현할 수 있다.
- Q-function에 대해 한번의 step을 더 진행하여 bellman equation처럼 재귀적으로 아래와 같이 표현할 수 있다.
- 재귀적인 과정을 반복하면 결국 value-function에 정의에 의하여 로 표현된다.⇒ 따라서 모든 state에서 를 따랐을 때의 value가 를 따랐을 때의 value보다 높기 때문에 policy는 항상 improvement 된다는 것을 보일 수 있다.
-
- . 개선된 policy는 최종적으로 optimal에 수렴하는가?
- 아래 등식이 성립하는 상황이라면 어떤 policy에 수렴했다고 말할 수 있다.
- bellman optimality equation을 적용할 수 있는 상황이다.
- for all
- 따라서 는 optimal policy이다.
- 아래 등식이 성립하는 상황이라면 어떤 policy에 수렴했다고 말할 수 있다.
3.4 Modified Policy Iteration
💬 Q. policy iteration을 수행할 때, evaluation단계에서 가 수렴할 때까지 반드시 진행해야하는가?
*여러가지 아이디어
- 보다 조금 더 일찍 종료할 수는 없을까?
- 과 같이 iteration횟수를 정해두고 수행하면 안될까?
A. 가 수렴할 때까지 진행하지 않아도 된다!
극단적인 경우, 단 한번만 policy evaluation을 진행하고 바로 policy improvement 단계로 넘어가도된다.
정확히 수렴하지는 않았지만 달라진 policy에 대한 value가 업데이트 되었기 때문!
4. Value Iteration
policy가 존재하지 않을 때 Iterative한 방법을 사용하여 value 기반으로 최적의 value function을 찾는 과정
4.1 Principle of Optimality : Theorem
- optimal policy의 component
- 첫번째로 optimal action 를 수행한다.
- 이후 그 다음 state 에서 다시 optimal policy를 따라 진행한다.
- Principle of Optimality : Theorem
A policy achieves the optimal value from state , , if and only if
- For any state reachable from s
- achieves the optimal value from state ,
4.2 Deterministic Value Iteration
- value iteration; DP의 도입
- 를 구하는 문제는 여러개의 subproblem들로 표현할 수 있다.
- subproblem one-step lookahead를 통하여 를 구할 수 있다. [Bellman Optimality Equation]
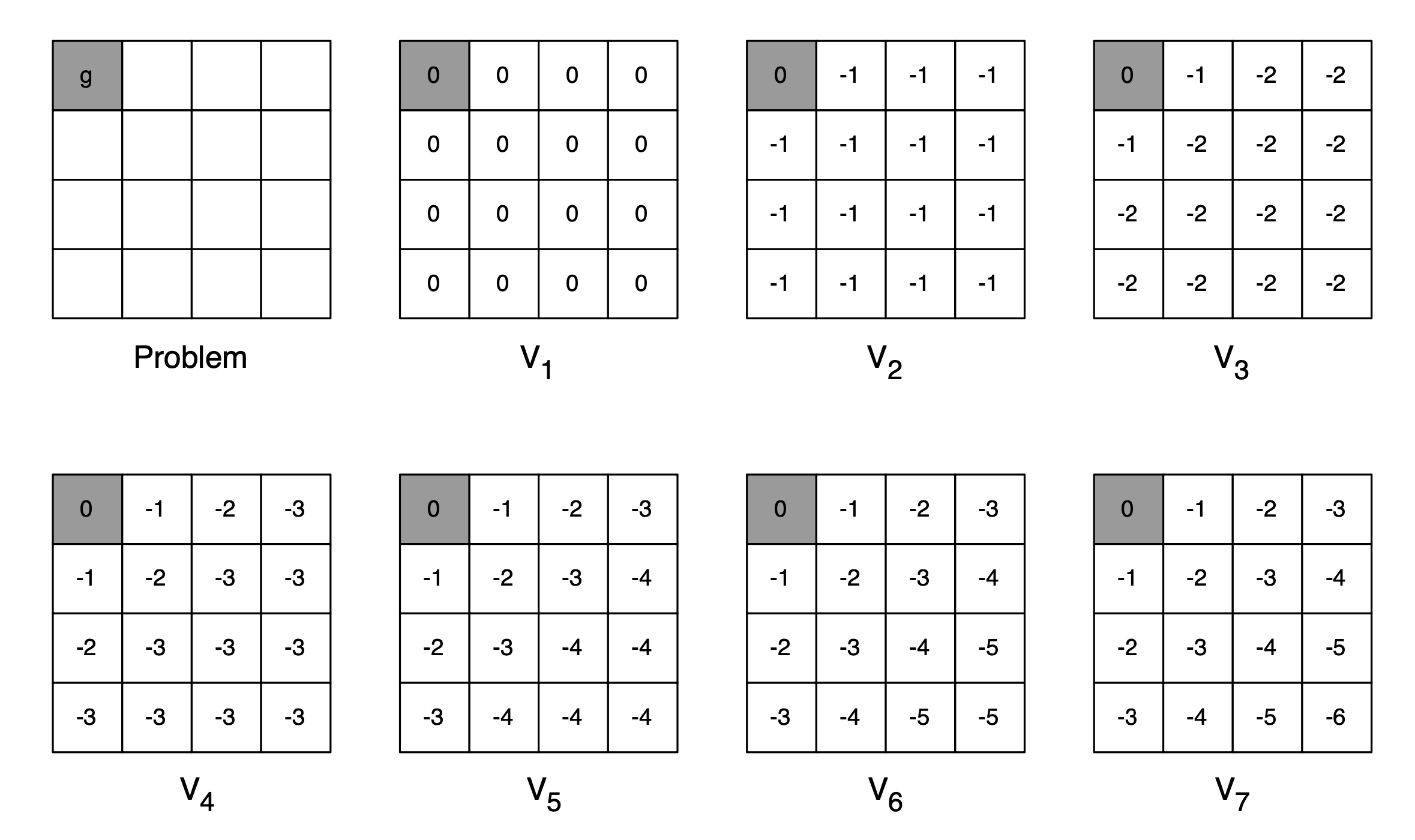
### 4.3 Example with Gridword
- 문제 : 최단거리를 찾는 문제
-
reward는 항상 -1
-
4.4 Value Iteration
- 문제 정의
- problem : optimal policy 를 찾는 것을 목적으로 한다.
- solution : Bellman optimality equation을 이용하여 iterative한 방법을 적용한다.
- synchronous backup
-
eachiteration k+1-
forall states-
update from
→ 전 단계 에서의 value f를 이용하여 현재 단계 에서의 value를 갱신한다.
(where 는 에서 갈 수 있는 가능한 모든 state)
-
→ 이 과정을 반복하면 에 수렴하게 된다.
-
-
- policy가 주어지지 않는다.
-
Bellman optimality Equation
model을 알 때, prediction과 control문제의 해결방법
| 문제 | 사용하는 벨만 방정식 | 알고리즘 |
|---|---|---|
| Prediction | Bellman Expectation Equation | Iterative |
| Policy Evaluation | ||
| Control | Bellman Expectation Equation + | |
| Greedy Policy Improvement | Policy Iteration | |
| Control | Bellman Optimality Equation | Value Iteration |
5. Extensions to DP*
기본적인 DP 방법을 적용하여 RL문제를 해결하는 것은 computation적으로 비효율이 너무 크기 때문에 여러가지 테크닉을 이용한다.
5.1 Asynchronous DP
-
In-Place DP
- 기존 방법 (synchronous) : 번째의 value function에 대한 정보와 번째의 value function에 대한 정보를 따로 저장해야하기 때문에 2배의 저장공간을 필요로 한다.
- In-Place : 갱신된 값과 갱신되지 않은 값을 저장하기 위한 공간을 따로 할당하지 않고 바로 덮어씌워서 업데이트 한다.
-
다른 state에 대해 value를 계산할 때는 이제 바로 직전에 갱신된 값을 사용하게된다.
-
이렇게 구현하더라도 문제를 풀 수 있다는 것은 증명되어있다.
-
- 기존 방법 (synchronous) : 번째의 value function에 대한 정보와 번째의 value function에 대한 정보를 따로 저장해야하기 때문에 2배의 저장공간을 필요로 한다.
-
Prioritised Sweeping
-
state에 우선순위(priority)를 두어, value를 업데이트할 때 중요한 state를 먼저 갱신한다.
-
중요한 state?
→ Bellman error가 큰 state
-
-
Real-Time DP
- state의 공간은 매우큰데 실제로 agent가 유의미하게 자주 방문하는 state는 그리 많지 않을 때,
- Agent가 실제로 방문한 state를 먼저 업데이트한다.
5.2 Full-width & sample backups
- Full-width backup
- DP의 방법론
- 에서 갈 수 있는 모든 를 이용하여 업데이트한다. → 이럴 필요가 있는가?
- Sample backup
-
large MDP에서는 Full-width backup으로 구현하기 매우 어렵다.
(state수가 늘어날 수록 계산량이 exponential하게 변화함)
-
Advantage
- state가 많아지더라도 고정된 sample의 수만 확인하기 때문에 cost가 일정하다.
- Model-free인 문제에서도 수행할 수 있다.
- break the curse of dimensionality
-
5.3 Approximate DP
Reference