convolution
- convolution은 합성곱이라는 의미에서 시스템 분석에서 많이 활용 하는 기법
- 컨벌루션을 이해하기 위해서는 우선 LTI(linear time invarient) 와 impulse 함수에 대한 응답을 알아야 함
Impulse function
- 임펄스 함수의 정의는 적분을 했을때 값이 1로 표시 되는 함수이다.
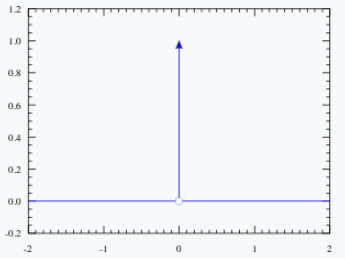
impulse 함수의 대표적인 성질
- 가 0이 아닐때는
- 가 0인 경우에는
- 입실론의 크기와 관계 없이 성립
- impulse 함수는 even funtion
- impulse 함수의 경우 시스템의 전달함수를 구할때 사용함
LTI
- Linear time invarient system은 신호 및 시스템을 구성하는데 매우 중요한 개념이다.
- 시스템은 입력과 출력이 시간에 독립적이고
- 입력이 선형이면 출력도 선형이라는 의미가 있음
- 수식으로 표현하면 다음과 같다.
LTI 시스템의 특징
- 선형성
- 시불변성
convolution
- convolution은 시간,공간 영역에서 입력함수와 전달함수의 관계를 나타 내주는 식으로 특정 시스템에 입력을 넣으면 나오는 출력을 연산해주는 연산자임
- 연속시간에서의 컨볼루션 연산
- 이산시간에서의 컨볼루션 연산
- 여기서 입력을 임펄스 함수로 넣어주면 아래와 같은 출력으로 나타낼 수 있음
- 입력함수로 임펄스 함수를 활용하면 시스템의 전달 함수를 바로 확인 할 수 있는 강점이 있음
- 연속시간에서의 컨볼루션 연산
- 이산시간에서의 컨볼루션 연산
이미지 영역에서 convolution
- 이미지 영역에서 convolution은 x,y좌표를 2차원계를 기초로 하여 진행함
- x 공간에 대한 convoution 연산 1번, y공간에 대한 convolution 연산 1번 총 2번이 수행 되어야 함
- 이미지 공간에서의 convolution

imageprocessing and Data science