1. 단위 벡터 (Unit vector)
- 단위 벡터의 정의
벡터의 크기(norm)가 1인 벡터를 단위 벡터(unit vector)라고 한다.
※ 벡터의 크기 norm =∣∣v∣∣=v12+v22+⋯+vn2
- 단위 벡터 구하기
- 주어진 벡터 v 와 같은 방향의 단위 벡터를 u 라고 했을 때, 아래 공식을 통해서 단위벡터를 구할 수 있다.
- 단위 벡터 u=∣∣v∣∣1v
- 단위 벡터 공식의 증명
∣∣u∣∣=∣∣∣∣v∣∣1v∣∣=∣∣∣∣v∣∣1∣∣∣∣v∣∣=∣∣v∣∣1∣∣v∣∣=1
- 예시
벡터 v 가 아래와 같이 주어졌을 때, 단위 벡터를 u 구하는 방법은 아래와 같다.v=⎣⎢⎡12−1⎦⎥⎤,∣∣v∣∣=12+22+(−1)2=6u=∣∣v∣∣1v=61⎣⎢⎡12−1⎦⎥⎤=⎣⎢⎢⎡61626−1⎦⎥⎥⎤
2. 정사영 (Orthogonal projection)
- 정사영의 정의
어떠한 도형 또는 선분 v 에 빛을 비추었을 때, 빛과 수직인 평면 U 에 생기는 그림자를 말한다.
이때 평면 U 에 생기는 그림자를 projU(v) 와 같이 표현한다.
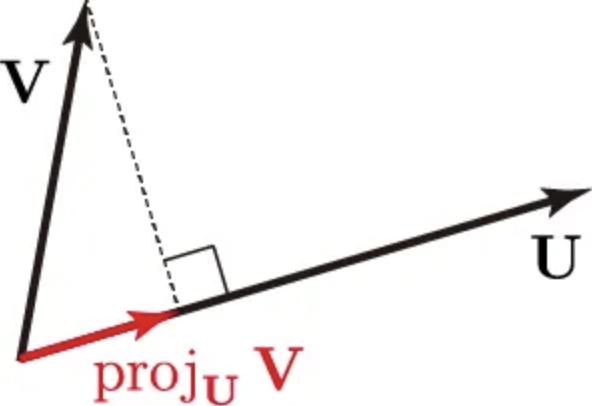
- 정사영의 성질
- projU(v) 와 v−projU(v) 는 서로 직교하기 때문에, projU(V)⋅(v−projU(v))=0 이다.
- projU(v) 는 평면 U 와 같은 방향이기 때문에, projU(v)=cU(c∈R) 이다.
- projU(v) 는 평면 U 와 같은 방향이기 때문에, U⋅(v−projU(v))=0 이다.
- 정사영 구하기
위의 정사영의 성질에 따라, 다음과 같은 수식을 통해 정사영을 구할 수 있다.U⋅(v−projU(v))=U⋅(v−cU)=0U⋅v−cU⋅U=0U⋅v=cU⋅UU⋅UU⋅v=cprojU(v)=cU=U⋅UU⋅vU=∣∣U∣∣2U⋅vU
- 예시
벡터 x,v 와 선분 L 이 주어졌을 때, 다음과 같이 정사영을 구할 수 있다.x=[23],v=[21],L={cv∣c∈R}projL(x)=cv=v⋅vx⋅vvprojL(x)=[21]⋅[21][23]⋅[21][21]=57[21]=[51457]=[2.81.4]
3. 단위 벡터와 정사영
단위 벡터가 주어졌을 때, 정사영은 보다 더 간략하게 구할 수 있다.
L={cu^∣c∈R}projL(u^)=u^⋅u^x⋅u^u^=∣∣u^∣∣2x⋅u^u^=1x⋅u^u^=(x⋅u^)u^
정사영은 선형 결합의 조건을 만족하므로, 행렬과 벡터의 곱셈으로 나타낼 수 있다.
T=projL:R2⟼R2T(x)=[T(e1)T(e2)]x[T(e1)T(e2)]=[([10]⋅[u1u2])[u1u2]([01]⋅[u1u2])[u1u2]]=[u1[u1u2]u2[u1u2]]=[u12u1u2u1u2u22]T(x)=[u12u1u2u1u2u22]x 