🚀 Motivations
-
CNN has boosted the performance of 2D segmentation.
However, given unordered and unstructured 3D point clouds,
2D methods cannot be directly extended to 3D points. -
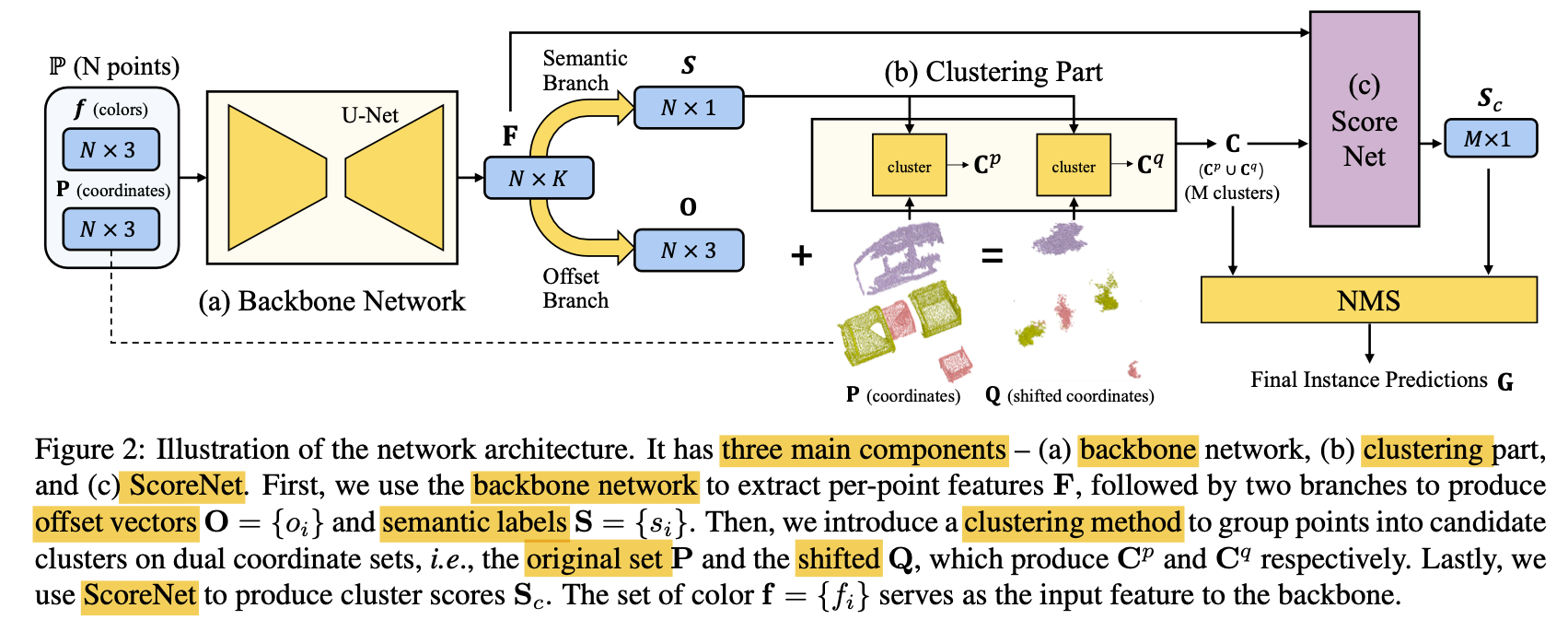
➡️ Paper designs bottom-up end-to-end framework, PointGroup
for 3D instance segmentation,
with the key target of better grouping of points.
🔑 Key Contributions
-
Paper presents PointGroup,
a new end-to-end bottom-up architecture,
specifically focused on better groupint the points
by exploring the void space between objects,
to deal with the challengin 3D instance segmentation task. -
Proposes a point clustering method
based on dual coordinate sets,
i.e., the original and shifted sets.
Along with the new ScoreNet,
object instances can be better segmented out.
⭐ Methods
Overview
-
PointGroup with the key target of better griuping points.
-
Main two problems to deal with
1) seperate the contents in 3D space into individual objces
2) determine the semantic label of each object. -
Backbone Network
Designed a two-branch network
to extract point features (by semantic seg backbone)
and predict semantic labels and offsets(by offset branch),
for shifting each point
toward its respective instance centroid. -
Clustering
Adopt effective algorithm to group points into clusters.
For each point, take its coordinates as a reference,
group it with nearby points of the same label,
and expand the group progressively. -
Consider two coordinate sets in two separate passes (called "Dual-Set Point Grouping")
1) original point positions
2) those shifted by the prdicted offsets. -
ScoreNet
Formulate the ScoreNet
to evaluate and pick candidate groups,
followed by the NMS(Non-Maximum Suppressio)
to remove duplicate predictions.
Backbone Network
-
Input: Point set P of N points.
Each points has a color fi = (ri, gi, bi)
and 3D coordinates pi = (xi, yi, zi)
(where i ∈ {1, ..., N} -
Backbone extracts point-wise feature Fi for each point.
: output feature of the backbos as F = {Fi} ∈ ℝ^(N x K)
(where K: # of channels) -
Paper's Implementation
1) Voxelize the points and construct a U-Net
with SSC(Submanifold Sparse Convolution) and SC(Sparse Convolution)
2) Then, Recover points from voxels
to obtain the point-wise features. -
Contextual and geotetric information
is well extracted by U-Net,
which provieds discriminative point-wise featrues F
Two branches
- Feed feature F into two brancehs
1) one for semantic segmentation
2) other for predicting a per-point offset vector
to shift each point towards the centroid of its respective object instance.
(si: predicted semantic label)
oi = (Δxi, Δyi, Δzi) : offeset vector of point i)
Semantic Segmentation Branch
-
Apply an MLP to F
to prodce semantic scores SC = {sc1, ..., scN} ∈ R^(NxNclass)
for the N points over the Nclass classes. -
Regularize the results
by a cross entropy loss Lsem. -
Predicted semantic label si for point i
is the class with the maximum score,
i.e., si = argmax(sci)
Offset Prediction Branch
-
Encodes F
to produce N offset vectors O = {o1, ..., oN} ∈ ℝ^(Nx3)
for the N points. -
For points belonging to the same instance,
constrain their learned offsets by an L1 regression loss as:
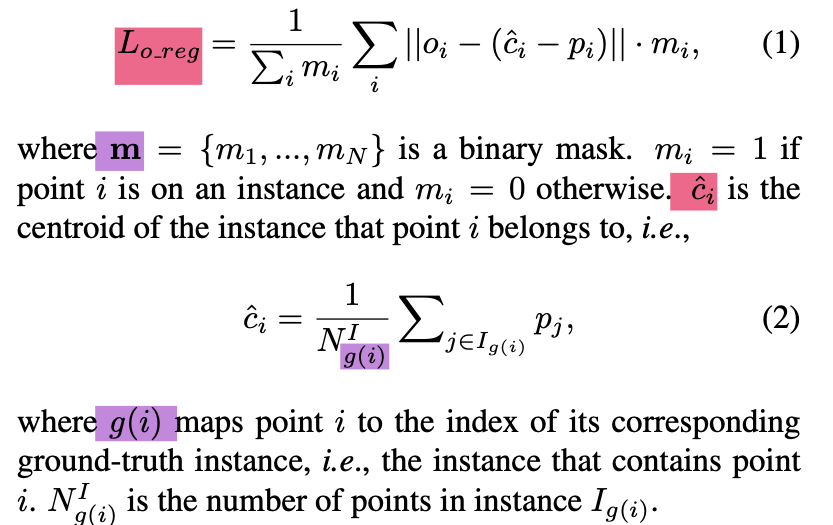
-
Paper finds it hard to regress precise offsets,
particulary for boundary points of large-size objcets,
since these points are relatively far from the instance centroids. -
To address this issue,
formulat a direction loss
to constrain the direction of predicted offset vectors.

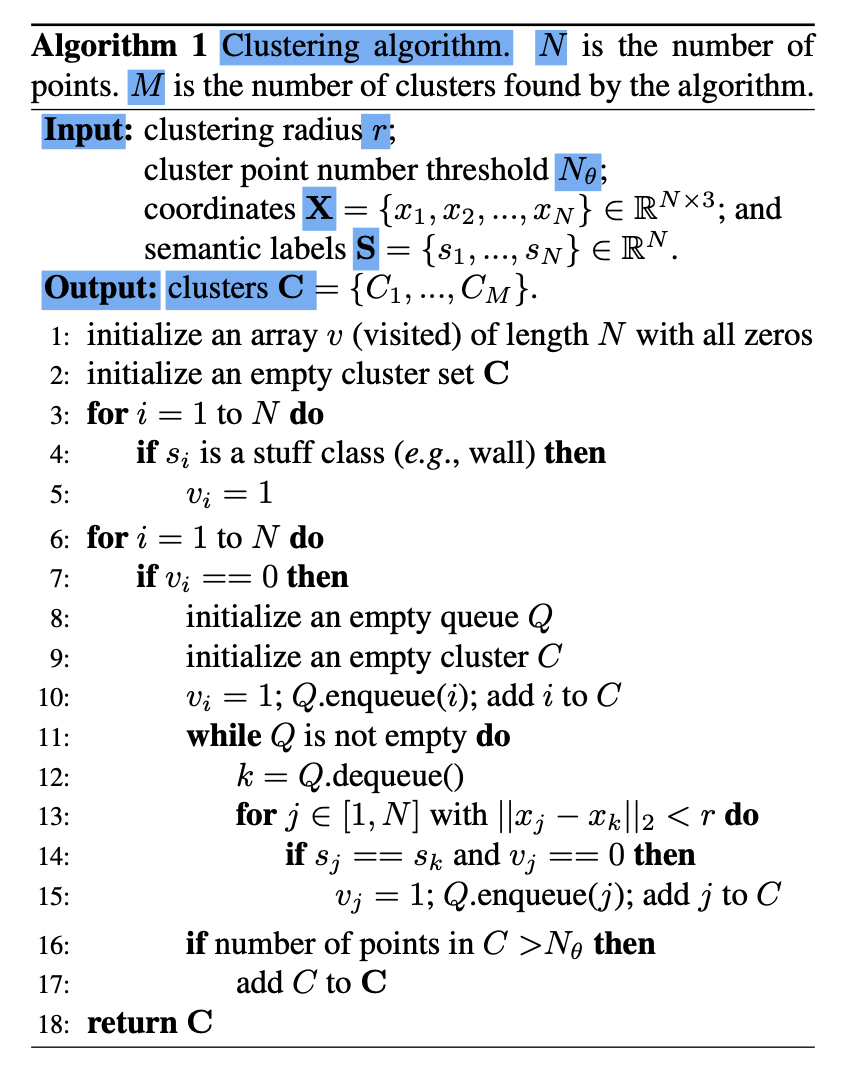
Clustering Algorithm
-
After obtaining the semantic labels,
begin to group points
into instance clusters
based on the void space betwwen objects. -
Clustering method to group poitns
close to each other
into same cluster,
if they have the same semantic label. -
However, clustering directly based on
the point coordinate set P = {pi}
may fail to separate same category objects
that are close to each other in 3D space
and mis-group them. -
Thus, use learned offset oi
1) to shift point i
towards its respective instance centroid
2) obtain shifted coordinates qi = pi + oi ∈ ℝ^3 -
For points belonging to the same object instance,
different from pi,
shited coordinates qi clutter around the same centroid. -
So by clustering based on shifted coorindate set Q = {qi},
separate nearby objects better,
even they have same semantic labels. -
However, for points near object boundary,
prdicted offset may not be accurate.
So, clustering algorithm employs
"Dual" point coordinate sets,
(original coord P and shifted coord Q). -
clustering reulst C as C^p U C^q
(clusters discovered based on P and Q) -
-
Core step of algoriths is that
1) for point i,
get points within the ball of radius r
centerd at xi
2) and group points with same semantic labels
as point i into same cluster.
(r serves as spatial constraint in the clustering,
so that two intra-category objects
at a distance larger than r are not grouped.
) -
Use BFS to group points of the same instance into a cluster.
ScoreNet
-
ScoreNet
1) to process the proposed point clusters C = C^p U C^q
2) produce a score per cluster proposal. -
NMS is applied to these proposals
with the scores
to generate final instance prediction.
(G: instance prediction = {G1, ..., GMpred} ⊆ C
I: GT instances = {I1, ..., IMgt}) -
Input: set of candidate clusters C = {C1, ..., CM}
(M: # of candidate clusters,
Ci: i-th cluster,
Ni: # of points in Ci
) -
Goal of ScoreNet
: to predict a score for each cluster
to indicate the quality of the associated cluster poposal,
for precisely reserving the better clusters in NMS
and thus combine strength of C^p and C^q.
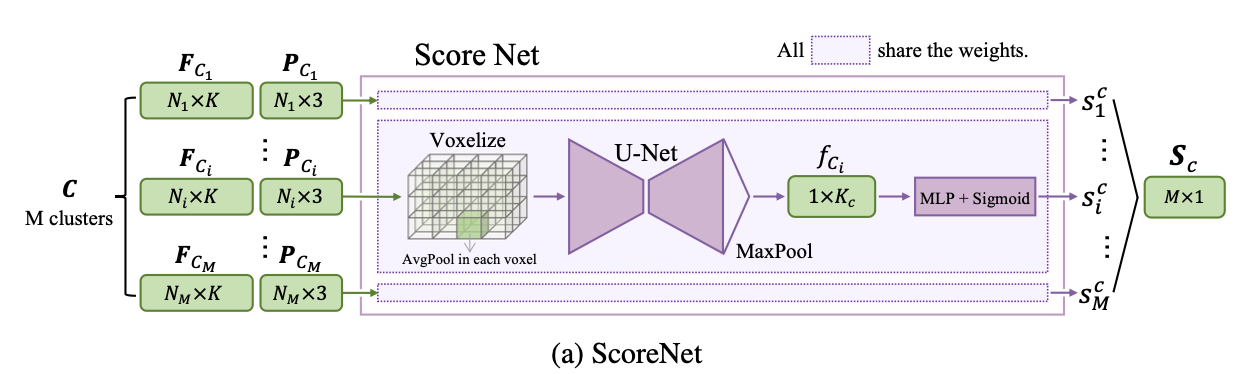
-
For each cluster,
1) gather the point features from F ∈ R^(N x K)
(features extracted by the backbone)
2) and form

where h maps the point index in Ci
to corresponding point index in P.
Similarly, Express coordinates for points in Ci as

-
To better aggregate the cluster info,
take Fci and Pci as the initial features and coordinates,
and voxelize the clusters. -
Feature for each voxel is average-pooled
from the initial features of points
in that voxel. -
Then feed them into a small U-Net with SSC and SC
to further eoncode the features. -
Cluster-aware max-pooling is then followed
to produce a single cluster feature vector

-
Final cluster scores
Network Training and Inference
-
-
Inference
perform NMS on clusters C
with predicted scores Sc
to obtain the final instance predictions G ⊆ C. -
IoU threshold is empirically set as 0.3
👨🏻🔬 Experimental Results
-
Datasets
ScanNet v2: 1613 sacns with 3D object instance annotations.
S3DIS: 3D scans across six areas with 271 scenes in total.
Each point is assigned on label out of 13 semantic classes. -
Evaluation Metrics
mAP(mean average percision)
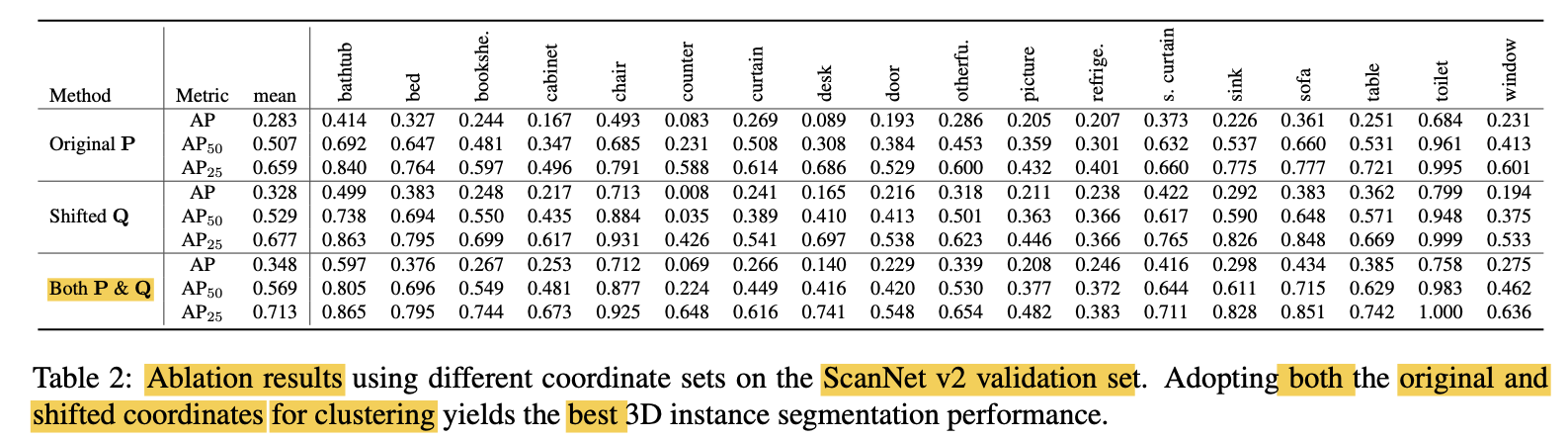
Ablation study
Clustering based on Different Coordinate Sets
Ablation on Clustering Radius r
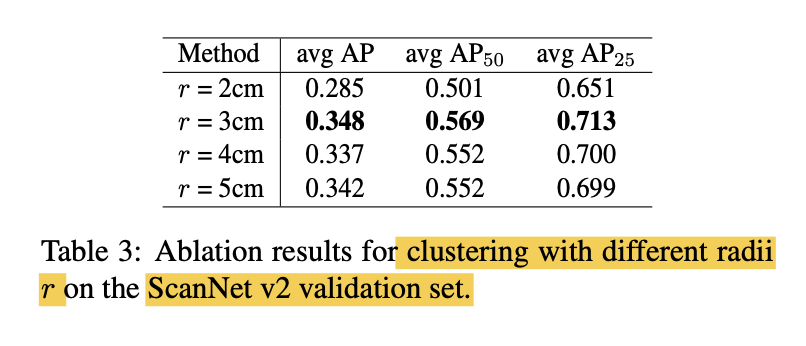
- small r is sensitive to point densitiy,
large r increase the risk of grouping two nearby same0class objects into one.
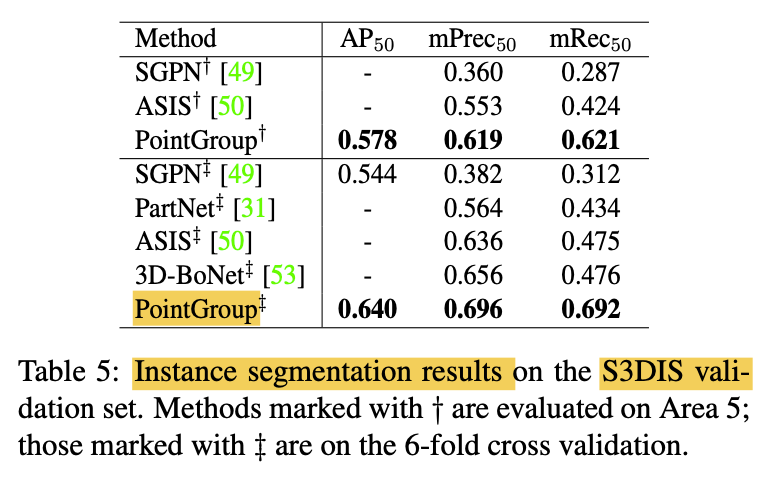
Quantitative Results
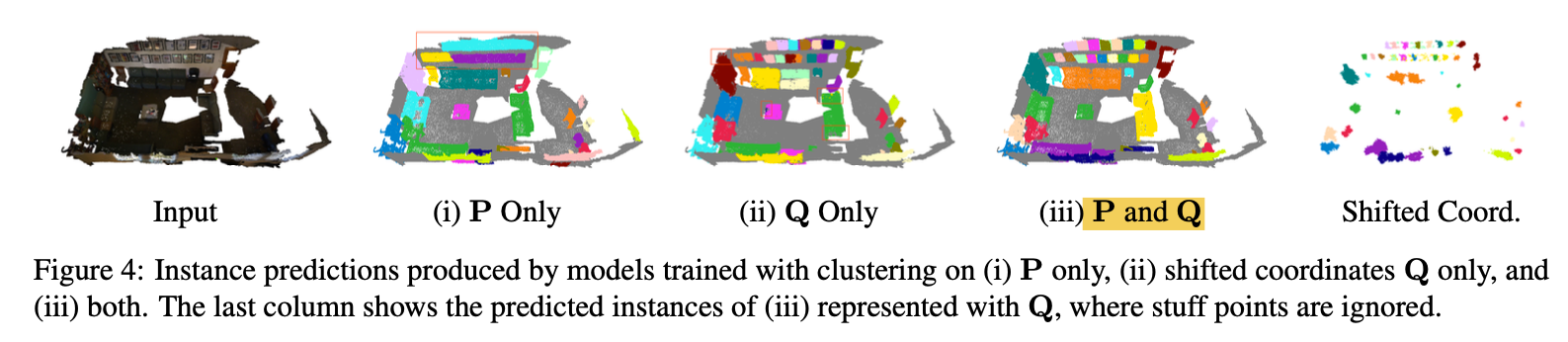
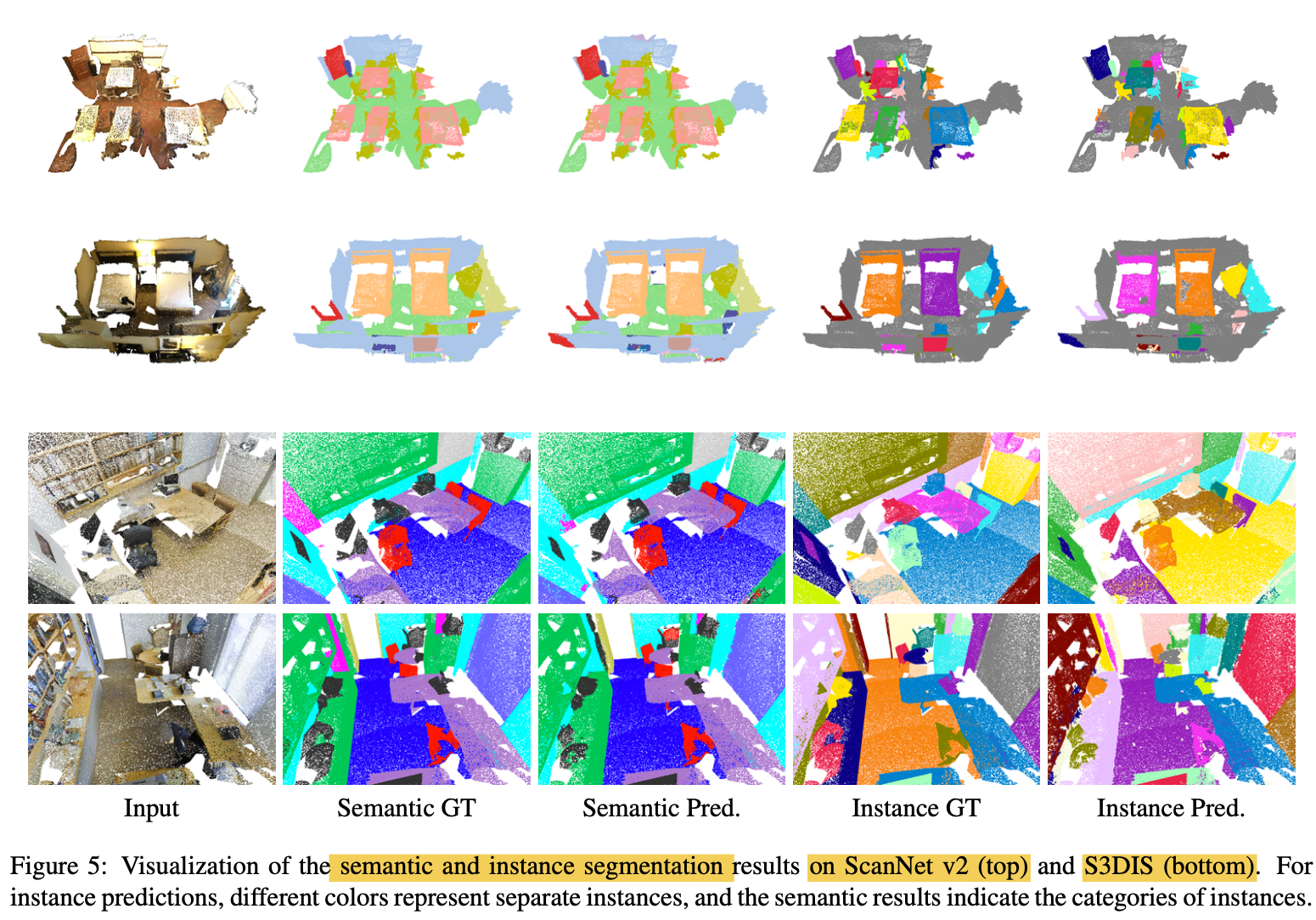
Qualitative Results
✅ Conclusion
-
Propsed PointGroup for 3D instance segmentation,
with a focus of
1) better grouping points by
exploring the in-between space
2) and point semantic labels
among the object instances. -
Considering situation
two intra-category objets
may be very close to each other,
Paper designs a two-branch network
to respectively learn a per-point semantic lable
and per-point offset vector
for moving each point towards its instance centroid. -
Cluster points based on both
1) original point coordinates
2) offset-shifted point coordinates
and combines strength of two coord sets
to optimize point grouping precision. -
Introduced ScoreNet
to learn to evalutate the generated candidate clusteres, -
Followed by the NMS
to avoid duplicates
before output the final predicted instances.
🛩️ Future work
-
Introduce a progressive refinement module
to relieve the semanic inaccuracy problem
that affects the instance grouping -
Explore the possibility of
incorporating weakly- or self-supervision techinques
to boost the performance.
