1. Introduction
- 카메라는 컴퓨터 비전에서 중요한 도구 중 하나임. 카메라를 어떻게 모델링할 수 있을까?
2. Pinhole cameras
-
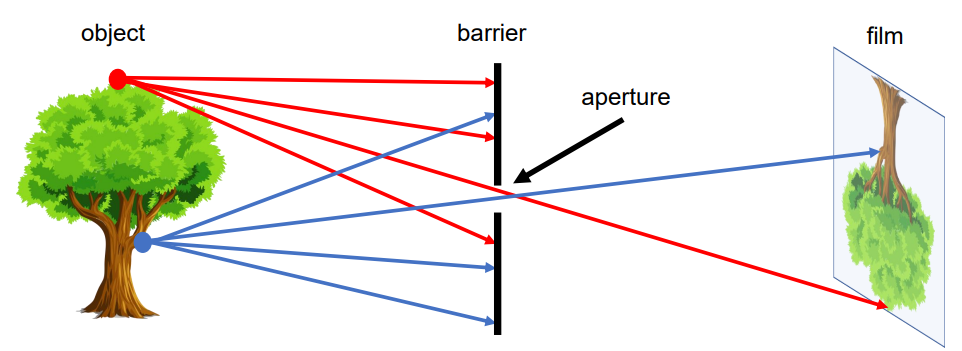
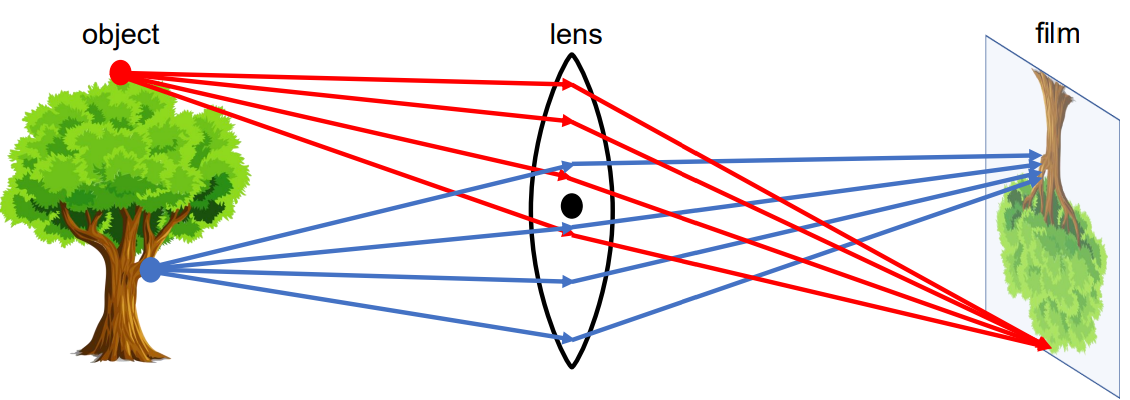
핀홀 카메라의 시스템을 설계해보자. 이는 3D 물체와 사진 필름 및 센서 사이에 작은 구멍 (small aperture)이 있는 barrier을 배치함으로써 설계할 수 있음.
- 3D 물체의 모든 지점에서 여러 개의 Ray가 방출되고, Barrier에 의해 ray 중 소수의 광선만 구멍을 통해 필름에 도달하게 되어 3D 물체의 점과 필름의 점 사이에 일대일 매핑이 가능하게 함.
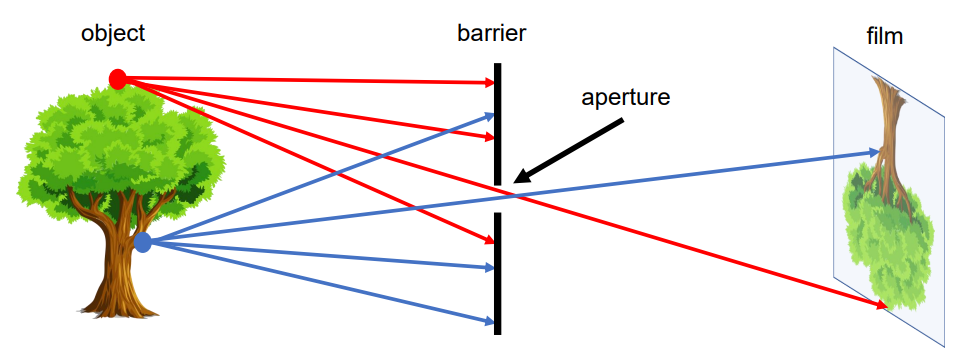
- 만약 Barrier가 없다면, 필름의 모든 지점은 물체의 모든 지점에서 방출되는 ray에 영향을 받음.
- 이러한 모델을 핀홀 카메라 모델이라고 함.
- 3D 물체의 모든 지점에서 여러 개의 Ray가 방출되고, Barrier에 의해 ray 중 소수의 광선만 구멍을 통해 필름에 도달하게 되어 3D 물체의 점과 필름의 점 사이에 일대일 매핑이 가능하게 함.
-
좀 더 formal한 핀홀 카메라 모델은 다음과 같음.
- 여기서 film은 image 혹은 retinal plane (레티날 평면)이라고 불림.
- aperture은 pinhole () 혹은 Center of the camera라고 불림.
- image와 pinhole () 사이의 거리는 focal lenght () 라고 불림.
- image가 와 3D 물체 사이에 존재한다고 가정하면 이러한 가상 image는 virtual image 또는 virtual retinal plane라고 함.
- 이러한 virtual image는 image의 투영 물체와 동일하며 단지 scale (similarity) 변화만 있음.
- image가 와 3D 물체 사이에 존재한다고 가정하면 이러한 가상 image는 virtual image 또는 virtual retinal plane라고 함.
-
이러한 핀홀 카메라를 어떻게 사용할까?
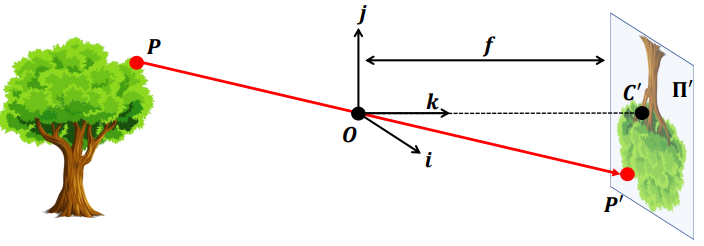
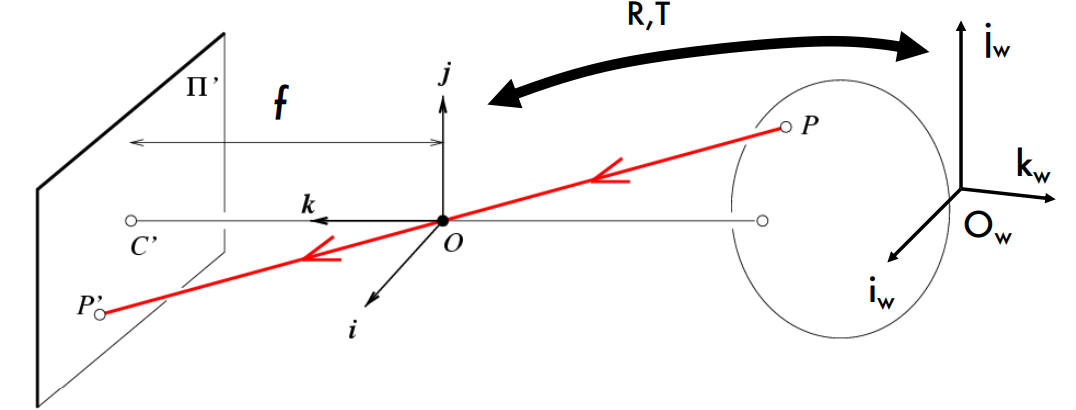
- 실제 3D 물체의 한 지점 라고 하면, 이 는 image의 평면 에 매핑되거나 투영되어 를 만들어 냄. (해당 강의에서 는 투영을 나타냄. )
- 자체에서도 이미지 평면에 투영되어 를 만들어 냄.
- 여기서 를 중심으로 하는 image 평면에 수직인 축 를 정의할 수 있고, 이 와 수직인 와 를 정의하여 camera reference system 또는 camera coordinate system이라고 불리는 좌표계를 정의
- 와 를 잇는 선을 optical axis라고 부름.
- 실제 3D 물체의 한 지점 라고 하면, 이 는 image의 평면 에 매핑되거나 투영되어 를 만들어 냄. (해당 강의에서 는 투영을 나타냄. )
-
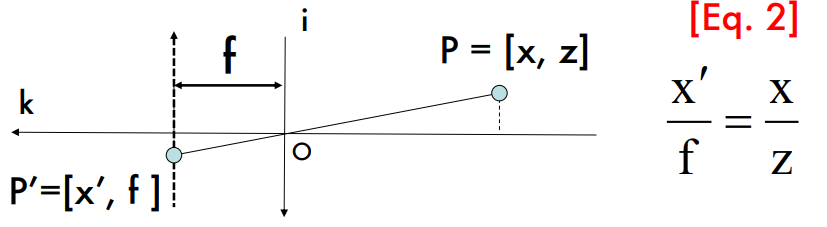
와 의 관계를 도출하면 3D 세계가 어떻게 이미지로 찍히는 지 이해할 수 있음.
-
삼각형 는 , , 로 구성된 삼각형과 닮음이므로 닮음비를 이용( ( )하면
-
-
이 핀홀 모델에서 우리는 aperture가 Single point로 가정하지만, 실제 이 aperture를 무한히 작다고 가정할 수 없음.
- aperture에 크기에 따른 이미지의 변화
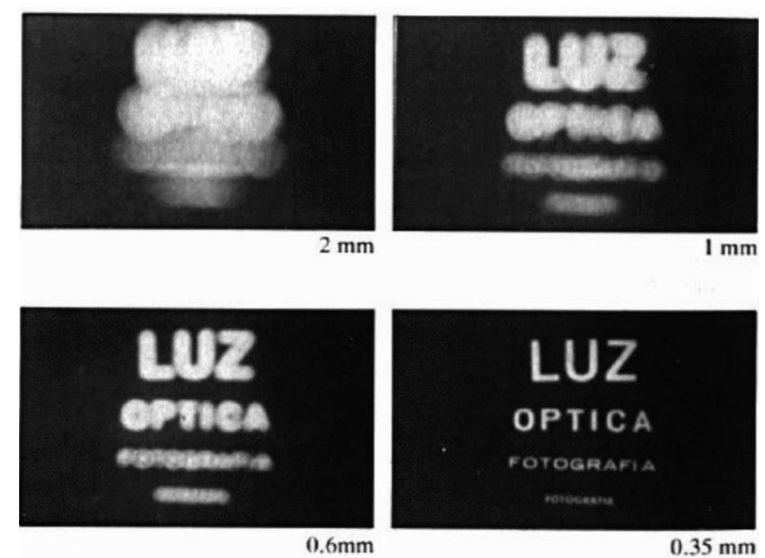
- aperture 크기가 커짐에 따라 barrier을 통과하는 ray의 수가 증가하게 되어 image의 각 지점은 여러 ray에 영향을 받아 이미지가 흐려짐
- 반면, aperture 크기가 작아짐에 따라 ray 수가 감소하여 이미지가 선명해지지만 어두워짐.
- 그렇다면, 선명하고 밝은 이미지를 촬영할 수 있는 카메라를 발명할 수 있을까?
- aperture에 크기에 따른 이미지의 변화
3. Cameras and lenses
- 현재 우리가 사용하고 있는 대부분의 카메라들은 이러한 선명도와 밝음의 trade-off를 렌즈를 통해 빛을 분산시키거나 집중시켜 이를 완화함.
- 즉, 핀홀을 렌즈로 대체하면 에서 나오는 모든 ray들이 렌즈에 의해 굴절되어 이미지 평면의 한 점 에 수렴함.
- 이를 통해 빛의 광선이 차단되는 문제가 제거됨.
- 하지만 이러한 특성은 모든 3D 점에 대해 성립하지 않고, 특정 점에서만 성립함.
- 파랑 점의 ray들은 한 점으로 수렴되지 않음. 즉, 물체가 초점에 맞는 특정 거리가 있음.
- 이는 computer graphics분야의 depth of field(DOF)라는 개념과 관련이 있음.
- 이를 통해 빛의 광선이 차단되는 문제가 제거됨.
- 렌즈의 다른 특성은 렌즈의 optical axis과 평행하게 이동하는 ray들은 focal point라는 점에 수렴함.
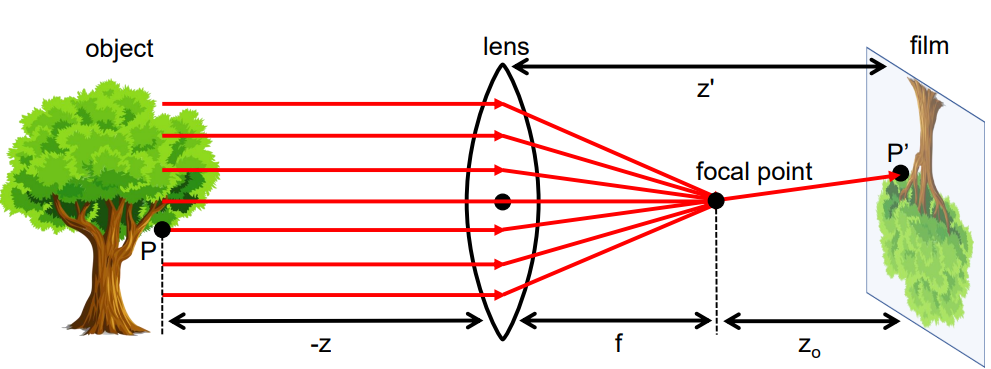
- focal point와 렌즈 중심 사이의 거리는 focal length 임.
- 핀홀 모델과 유사하게 렌즈에서도 와 간의 관계를 나타낼 수 있음.
- 핀홀 모델에서는 였지만, 렌즈 모델에서는 임에 주의
- 이러한 유도 과정은 paraxial (optical axis과 가까운 ray) 혹은 thin lens을 가정하므로 paraxial refraction model라고 함.
- 근축 가정(paraxial assumption) = 을 로 대체
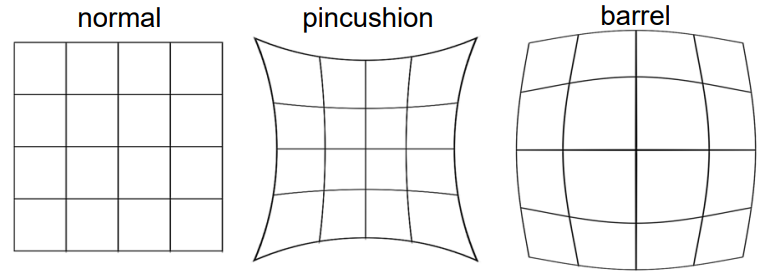
- 이는 optical axis에서의 거리에 따라 image의 magnification가 변하는 현상인 방사 왜곡(radial distortion)과 같은 수차(aberration)를 유발함.
- magnification가 증가하면 pincushion distortion (핀쿠션 왜곡)이라 함.
- magnification가 감소할 때는 barrel distortion(배럴 왜곡)이라고 함. (보통 fish-eye lenses을 사용할 때 발생)
4. Going to digital image space
- 3D 공간을 digital image로 모델링할 때 고려해야 할 사항을 알아보자. 해당 섹션의 모든 결과는 핀홀 모델을 사용하지만, paraxial refraction model에도 적용이 가능함.
- 3D 공간에서의 점 는 2D 점 로 매핑되는데 이를 projective transformation(투영 변환)이라고 함.
- 하지만 다음과 같은 이유로 3D 물체가 image 평면으로 투영된 것이 실제 디지털 이미지에서 우리가 보는 것과 같지 않음.
- digital image의 점들은 image 평면의 점들과 다른 reference system을 가짐.
- digital image는 이산적인 픽셀이지만, image 평면의 점들은 연속적임.
- 실제 센서들은 non-linearity (왜곡)을 가질 수 있음.
- 따라서 이를 해결할 수 있는 몇 가지 transformation을 알아보자.
4-1. The Camera Matrix Model and Homogeneous Coordinates
4.1.1 Introduction to the Camera Matrix Model
- Camera matrix model (카메라 행렬 모델)은 3D 물체의 점 가 이미지 좌표 에 맵핑되는 몇 가지 파라미터로 표현됨.
- , = image 평면과 digital image 좌표가 어떻게 변환에 의해 달라질 수 있는지를 설명함.
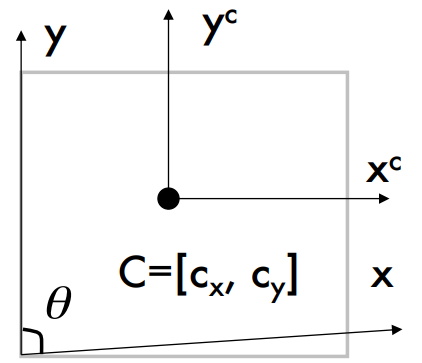
- image 평면 좌표는 축이 image 평면과 교차하는 지점에 원점 를 갖음.
- 하지만, digital image 좌표는 일반적으로 이미지의 최하단 모서리에 원점을 가짐.
- 따라서 image와 digital image의 맵핑을 위해 , 평행 이동을 이용함.
- , = digital image의 점들이 픽셀로 표현되는 것과 image 평면의 점이 측정 단위 (cm)로 표현되는 것을 보정
- 이 파라미터들은 픽셀/cm 등의 단위를 가짐.
- 픽셀의 가로세로 비율이 항상 1:1이 아니기에, 와 는 다를 수 있음. 이면 정사각형 픽셀)
- , = image 평면과 digital image 좌표가 어떻게 변환에 의해 달라질 수 있는지를 설명함.
- 이러한 투영이 선형변환이라면, 위 식을 행렬과 벡터로 나타낼 수 있지만, 선형 변환이 아님 (를 나누므로).
- 하지만, 행렬-벡터 곱으로 표현하는 것이 유용하므로 비선형성을 고려하더라도 행렬-벡터 곱으로 나타내길 원함.
- 이러한 해결책이 Homogeneous Coordinates
4.1.2. Homogeneous Coordinates
- 새로운 좌표를 추가하여 를 로 변환하자. (도 로 변환)
- 이러한 확장된 공간을 homogeneous coordinate system이라고 함.
- 벡터와 homogeneous coordinate 간의 equality(동일성)은 마지막 좌표가 1일 때만 성립함.
- 마지막 좌표가 1이 아니라면, homogeneous coordinate ()에서 유클리드 좌표 ()를 얻음.
- 위 식을 homogeneous coordinate을 사용해서 나타내면
-
앞으로 별도의 언급이 없는 한 homogeneous coordinate을 사용할 것이고, 이에 따라 h 인덱스를 사용하지 않을 것임.
-
이를 더 세분화하면
- K 행렬을 camera matrix라고 부름
-
4.1.3. The Complete Camera Matrix Model
- 위에서 정의한 camera matrix 는 카메라의 특성과 모델을 설명하는 파라미터가 포함됨.
- 하지만 이 공식에서는 skewness(비대칭도)와 distortion(왜곡)을 해결할 수 있는 파라미터가 없음.
- skewness(비대칭도)
-
이는 두 축 사이의 각도가 90도 보다 크거나 작은 상태를 의미함. 보통 센서의 불량으로 인해 발생함.
-
skewness를 고려한
-
- distortion(왜곡)
- 이 수업에서는 distortion를 무시
- 따라서 이 수업의 camera matrix은 5개의 자유도를 가짐.
- focal length로 인한 자유도 2개 (), offset으로 인한 자유도 2개 (, ), skewness로 인한 자유도 1개 ()
- 이러한 파라미터들은 카메라에 내재된 고유한 파라미터이므로 intrinsic parameters (내재적 파라미터)라고 함.
4.2 Extrinsic Parameters
-
지금까지 카메라의 intrinsic parameters를 통해 와 사이의 매핑을 알아봤다. 하지만 다른 좌표계에서 3D world에 대한 정보가 주어지면 어떻게 할까?
- 회전 행렬 과 변환 벡터 로 표현되는 추가적인 변환이 필요함. 즉, camera coordinates과 다른 coordinates 사이의 매핑이 필요함.
- 회전 행렬 과 변환 벡터 로 표현되는 추가적인 변환이 필요함. 즉, camera coordinates과 다른 coordinates 사이의 매핑이 필요함.
-
만약 다른 좌표계의 3D 물체의 한 점 이 주어지면, 그 점의 camera coordinates은
로 표현됨.
-
이를 방정식 (7)에 대입하고 단순화하면 다음과 같음.

-
이 R과 T 파라미터는 카메라 외부의 파라미터이므로 extrinsic parameters(외재적 파라미터) 라고 함.
-
full projection matrix 은 extrinsic parameters와 intrinsic parameters로 구성되어 있으며 (3, 4) 크기와 11개의 자유도를 가짐.
-
왜 (3, 4) 크기와 11의 자유도를 가질까?

- 회전 행렬 R은 (3, 3)의 행렬이며, 3개의 자유도를 가지고 있음. (회전각도 , , 3개)
- 변환 벡터 T는 (3,1) 벡터로, 위치를 나타내는 3개의 자유도를 가짐.
- 회전 행렬 R은 (3, 3)의 행렬이며, 3개의 자유도를 가지고 있음. (회전각도 , , 3개)
-
-
