1. Introduction
- 지금까지 camera calibration 또는 single view metrology를 통해 하나의 이미지로부터 intrinsic and extrinsic parameters를 계산하고 3D 세계에 대한 속성을 도출했다.
- 하지만, 일반적으로 단 한 장의 이미지로부터 3D 세계의 전체 구조를 복원하는 것은 3D에서 2D로의 매핑 과정에서 발생하는 intrinsic ambiguity(모호성)때문에 불가능함.

- 위 사진은 남자가 피사의 사탑을 받치고 있는 것으로 보이나 사실 이건 다른 깊이가 이미지 평면에 투영되면서 발생한 착시임.
- 이 섹션에서는 여러 대의 카메라에서의 여러 view point가 얼마나 유용하고, 주변 세계를 더 잘 이해하는 데 어떻게 도움이 되는 지 알아볼 것임.
2. Epipolar Geometry
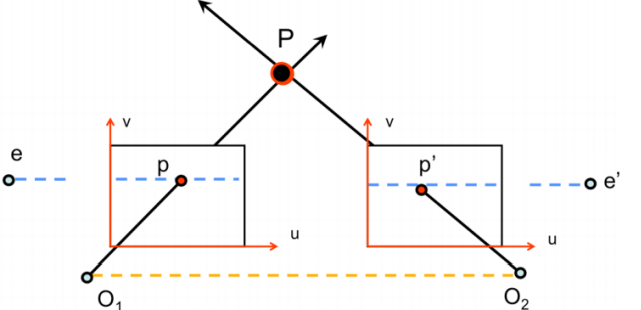
- multiple view geometry에서 여러 카메라. 3D point, 각 카메라 이미지 평면의 투영 등을 연결하는 기하학을 Epipolar Geometry(에피폴라 기하학) 이라고 부름
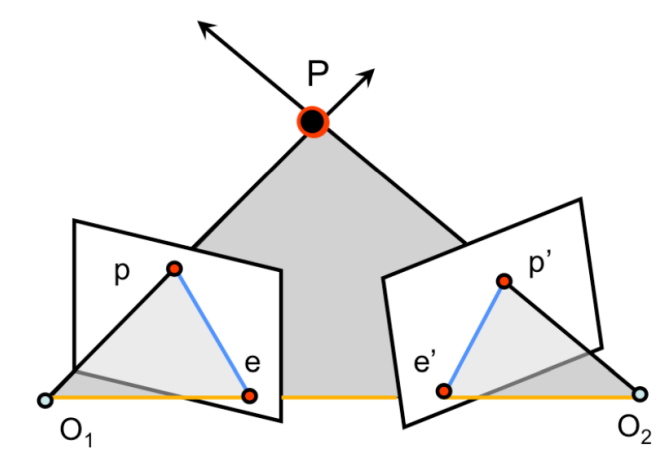
- 위 사진처럼 표준 에피폴라 기하학은 두 개의 카메라가 동일한 3D 점을 P를 관찰하고, P는 이미지의 , 에 투영됨.
- 카메라 중심은 , 에 위치하고, 이 둘 사이의 선 (주황색 선)을 baseline이라고 함.
- 두 카메라 중심 , 과 P로 정의된 평면 (회색 평면)을 에피폴라 plane이라고 함.
- baseline과 각 이미지 평면의 교점을 epipoles , 라고 함.
- 에피폴라 plane과 두 이미지 평면의 교차하는 선 (파랑색 선)을 에피폴라 line이라고 함.
- 이미지 평면이 서로 평행하게 되면 밑의 사진과 같은 에피폴라 기하학을 만듦.
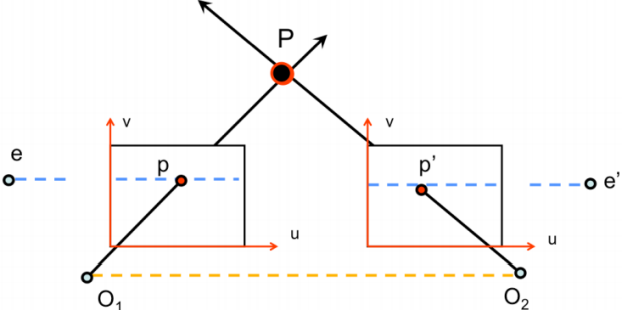
- baseline이 이미지 평면과 평행하기에 (baseline과 각 이미지 평면의 교점이 없으므로) epipoles 와 가 무한대에 위치함.
- 또한, 에피폴라 선이 이미지 평면의 u축과 평행함.
- 이는 추후 image rectification 섹션에서 다룰 것임.
- 우리가 사진을 찍을 때, 실제 3D 위치 P에 대한 정확한 정보를 알 수 없음.
- 하지만, 이미지 평면에서 P에 대한 p점을 결정할 수 있으며, 우리가 카메라 위치, 방향 및 camera matrix에 대해 알고 있을 때,
-
, 와 이미지 점 p을 통해 에피폴라 평면을 정의할 수 있으며, 이를 통해 에이폴라 선 역시 정의할 수 있음.
-
또한, 역시 의 이미지 에피폴라 선 위에 위치함.
이를 통해, 두 이미지 간에 constraint를 만들 수 있음.
-
- 포인트와 에피폴라 선을 매핑하는 방법을 알아보자.
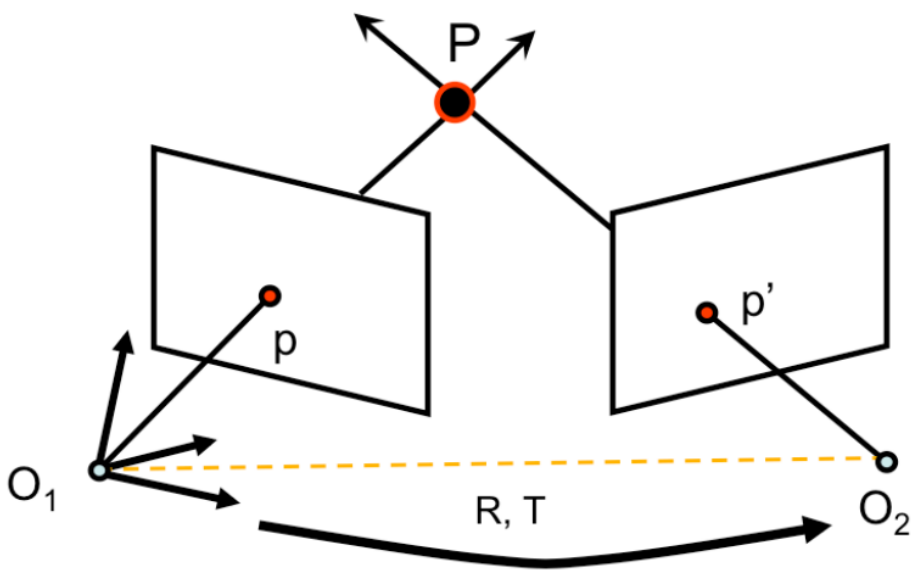
- 3D 점을 각 이미지 평면의 위치로 매핑하는 camera projection matrix를 , 이라고 정함.
- 또한, world reference system이 첫 번째 (M) 카메라에 연결되고, 두 번째 카메라는 회전과 rotation 이후, translation 에 의해 offset된다고 가정.
- 이를 통해 camera projection matrix는 다음과 같이 정의됨.
- 이고 이므로 M’에서 으로의 변환은 이고, = 임.
3. The Essential Matrix
- 간단하게 하기 위해 우리가 canonical camera (표준 카메라)를 통해 촬영을 했다고 가정하자. 이 경우에 이다.
- 따라서 위 식은 다음처럼 간단하게 할 수 있고,이로 인해 의 위치가 world reference system이 연결된 첫 번째 카메라에서 로 나타낼 수 있음.
- 벡터 와 가 에피폴라 평면에 위치하므로
- 이 두 벡터의 외적을 계산하면 (끼리의 외적은 0)에피폴라 평면에 수직인 벡터를 얻게 됨.
- 또한, 에피폴라 평면에 있는 점 는 에 수직이므로 이 둘의 내적이 0이여야 함.
- 선형대수에서 두 벡터의 외적을 다음처럼 행렬-벡터 곱으로 표현 가능
-
식 유도
이고 이걸 행렬로 나타내면 됨.
-
- 선형대수에서 두 벡터의 외적을 다음처럼 행렬-벡터 곱으로 표현 가능
- 식 3에 이를 활용하면, 이 됨.
- 이 두 벡터의 외적을 계산하면 (끼리의 외적은 0)
- 이때, 을 Essential Matrix 라고 하며, 이는 epipolar constraint을 간소화함.
- Essential Matrix 는 5개의 자유도를 가지는 3*3 행렬이며, rank가 2이고 singular Matrix이다.
- 이 행렬은 와 에 대한 에피폴라 선 계산에 사용됨.
- 예를 들어, 는 두 번째 카메라의 이미지 평면에서 에피폴라 선이고,
- 는 카메라 1의 이미지 평면에서 에피폴라 선임.
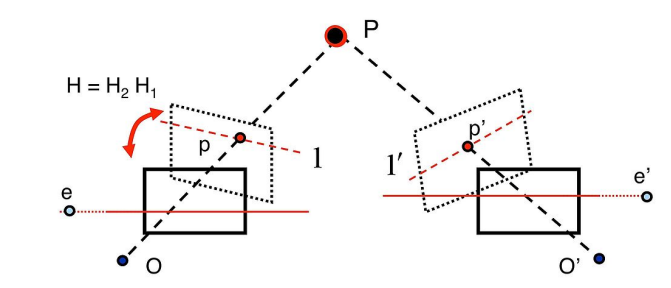
- 또한 이 행렬의 중요한 속성은 epipole에 대한 내적이 0임. ()
- 즉, 카메라 1의 이미지에서 epipole 𝑒 외의 모든 점 𝑥에 대해 카메라 2의 이미지에서 대응하는 에피폴라 선 는 epipole 𝑒 ′을 포함
- 말이 좀 어려운데, 크게 두 개로 나누면
- 카메라 1에서 한 점 x는 정확히는 모르지만, 카메라 2의 에피폴라 선 중 한 점에 대응되고,
- 이 에피폴라 선 은 epipole 를 포함함. (두 번째 사진 참고)
- 말이 좀 어려운데, 크게 두 개로 나누면
- 따라서, 을 만족함.
- 즉, 카메라 1의 이미지에서 epipole 𝑒 외의 모든 점 𝑥에 대해 카메라 2의 이미지에서 대응하는 에피폴라 선 는 epipole 𝑒 ′을 포함
- 이 행렬은 와 에 대한 에피폴라 선 계산에 사용됨.
4. The Fundamental Matrix
- 우리는 ****지금껏 canonical camera를 가정하여 , 관계를 도출했지만, 그렇지 않다면?
- , (c = canonical camera)가 될 것이고, 에 이를 대입하면이 도출됨.
- 여기서 을 Fundamental Matrix이라고 함. (즉, )
- Fundamental Matrix은 ***Essential Matrix처럼 33 행렬이며, Rank가 2이고 singular Matrix이다.
- Essential Matrix와 비슷하지만, Fundamental Matrix는 자유도가 7이며, , 정보를 포함하고, 이 행렬을 통해 카메라 행렬 𝐾, 𝐾’와 변환 𝑅, 𝑇를 몰라도 𝑝와 𝑝 ′에 대한 에피폴라 선을 계산 가능 (, )
- 또한, , 을 만족함.
- Fundamental Matrix을 알면, 이미지의 한 점만 알고 있어도 대응하는 다른 이미지의 점에 대한 constraint (the epipolar line)을 구할 수 있음.
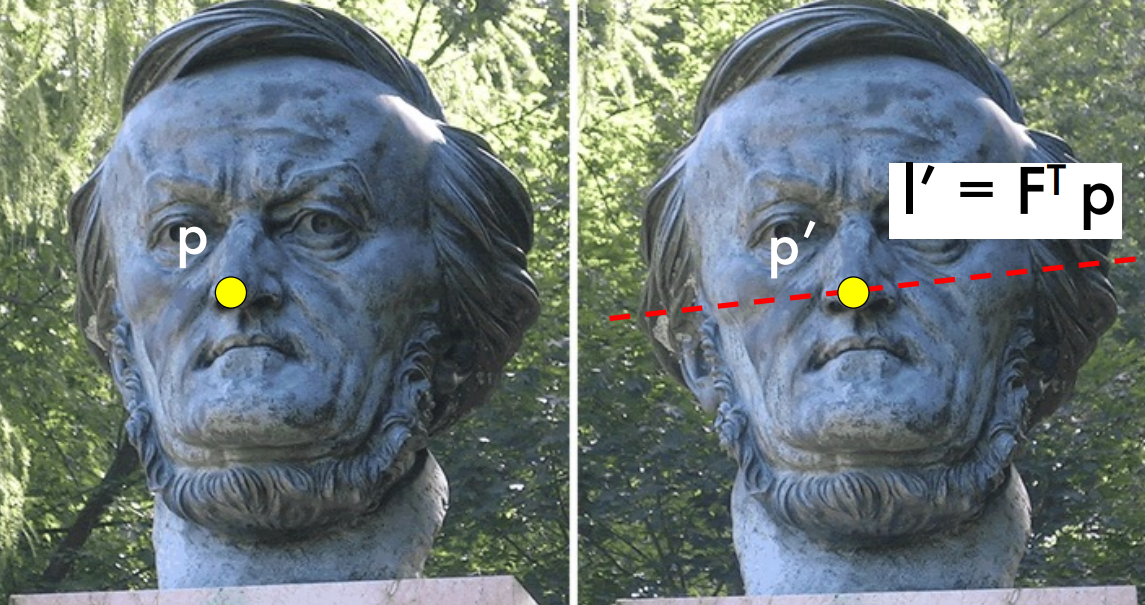
- 따라서 는 3D reconstruction, Multi-view object/scene matching에 사용할 수 있는 매우 강력한 도구임.
4.1 The Eight-Point Algorithm
- 하지만, 이 F를 얻는 것을 쉽지 않다. 하지만, 동일한 장면의 두 이미지를 가지고 카메라의 파라미터을 모른 채로 Fundamental Matrix을 얻는 Eight-Point Algorithm이 있다.
- 이는 두 이미지 사이에 최소 8쌍의 대응점을 알고 있다는 가정을 함.
- 각 대응점 과 은 를 만족함. 이 식은 다음과 같이 재구성할 수 있음.
- 식 유도
- 이를 벡터로 표현.
- 식 유도
- 3×3 행렬인 Fundamental Matrix에서 임의의 수인 scale 파라미터를 제외하면 이런 조건이 8개 필요함.
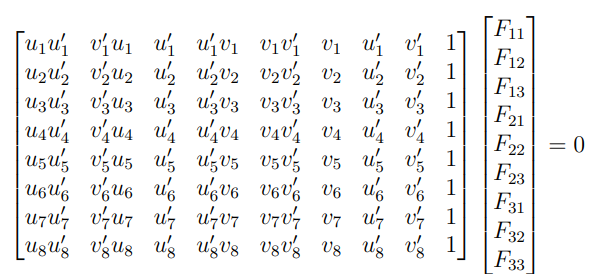
- 이를 간단하게 표현하면 .
- 는 8개 (이상의) 점으로부터 유도된 N × 9 행렬이고, f는 Fundamental Matrix의 요소들임.
- 이를 간단하게 표현하면 .
- SVD를 통해 최적 행렬 를 찾기 위해 다음 조건을 만족해야 함.
- SVD을 통해 를 얻으면 full rank 즉, rank = 3인 를 얻게 되지만, 의 Rank는 2이므로 approximation 방법을 사용하여 F를 얻음.
4.2 The Normalized Eight-Point Algorithm
- 위와 같은 standard least-squares 접근은 사실은 정확하지 않음. (p_i와 이에 대응하는 사이의 거리가 10 픽셀 정도로 차이남.)
- 이를 줄이기 위해 Normalized Eight-Point Algorithm을 사용.
- 기존 접근에서 F를 구하기 위해 W가 SVD에 맞지 않음. (ill-conditioned)
- SVD가 제대로 작동하기 위해, W의 특이값이 0 이거나 0에 가까운 점을 가지고 있어야 하고, 다른 값들은 0이 아니여야 함.
- 하지만, 현대 카메라들은 픽셀이 매우 크기에 매우 큰 특이값과 상대적으로 작은 나머지 특이값을 가지게 됨.
- 이를 해결하기 위해 이미지 포인트들을 정규화함 (translation 및 scaling을 적용)
-
새로운 좌표계의 원점이 이미지 포인트 중심에 위치하게 함. (translation)
-
변환된 포인트의 mean square distance가 2 픽셀이어야 함. (scaling)
-
- 이를 통해 다음처럼 나타낼 수 있음 (T는 transformation matrices)
- 이제 이를 통해 8점 알고리즘으로 새로운 를 계산하고 이를 다시 비정규화함.
- 이 F는 real-world applications에 사용할 수 있음.
5. Image Rectification
- 두 이미지가 서로 평행한 경우를 알아보자.
- 두 카메라가 동일한 K를 가지고 있고, 카메라 사이에 회전이 없다.()
- Essential Matrix을 계산할 때, 두 카메라가 x축을 따라 이동한다고 가정하면, 이므로이렇게 됨. (헷갈리면 위에 a, b 행렬-벡터 곱 표현 참고하기)
- Essential Matrix을 알기에 이미지 평면의 점에 대한 에피폴라 선의 방향을 찾을 수 있음.
- 와 관련된 에피폴라 선 의 방향을 계산해보자.
- 도 이렇게 구할 수 있고, 이 와 이 에피폴라 선은 수평함.이므로 즉, 수평하다.
- 도 이렇게 구할 수 있고, 이 와 이 에피폴라 선은 수평함.
- 와 관련된 에피폴라 선 의 방향을 계산해보자.
- 이 수평함은 와 사이의 계산에 편리함을 제공함.
- 따라서 두 이미지를 평행하게 만드는 Image Rectification은 이러한 유용성을 만들기 위함임.
- Image Rectification을 위해 카메라 매트릭스 나 두 카메라 사이의 상대 변환 를 알 필요 없음.
- 대신 정규화된 8점 알고리즘으로 추정된 fundamental matrix을 사용하여 시작함.
- fundamental matrix을 이용하여 의 에피폴라 선 , 을 계산하고 (점마다 에피폴라 선이 존재) 이 에피폴라 선을 통해 각 이미지의 에피폴 를 추정. (에피폴은 에피폴라 선에 교차하므로)
- 하지만, 실제로는 노이즈 때문에 에피폴라 선과 점의 least squared error를 최소화하여 찾음.
- 에피폴라 선은 에피폴라 선 위에 있는 모든 점에 대해 을 만족하고, 이때 으로 정의하면,이와 같고, 이를 SVD로 풀면, 에피폴 를 얻을 수 있음.
- 이렇게 얻은 , 는 수평이 아니므로 수평을 만들기 위해 homographies , 를 사용함.
- 에피폴 를 무한대의 수평축 점 에 매핑하는 를 먼저 찾아보자. (두 번째 이미지에 대한 호모그래피)
- 호모그래피는 이미지 중심 점에 translation와 rotation을 적용하는 것과 같음.
- 첫 번째로 이미지의 중심이 homogeneous coordinate (0,0,1)에 있도록 두 번째 이미지를 변환 (뒤에 있는 다른 변환들을 간단히 하기 위해)
-
이미지 중심은 (, )이므로 translation matrix은 다음과 같다.
-
- 이제 회전을 적용하여 에피폴을 지점에 위치시킴.
- translation 적용된 에피폴 이 에 위치한다고 하면,이와 같다.
- translation 적용된 에피폴 이 에 위치한다고 하면,
- 마지막으로 에 놓인 점을 무한대의 수평축 점 으로 보내기 위해 다음의 변환을 적용.
- 첫 번째로 이미지의 중심이 homogeneous coordinate (0,0,1)에 있도록 두 번째 이미지를 변환 (뒤에 있는 다른 변환들을 간단히 하기 위해)
- 이를 통해 무한대의 에피폴을 얻을 수 있다. 이를 다시 이미지 공간으로 변환해야 하므로 를 적용하여 호모그래피 를 다음과 같이 정의 (계산 편의를 위해 이미지를 (0,0,1)로 보낸것을 다시 돌려놓음)
- 이제 첫 번째 이미지에 맞는 호모그래피 를 찾아보자. 이를 위해 이미지 간의 대응점 사이의 제곱 거리 합을 최소화하는 변환 을 찾음.
- 이는 와 같음.
- 이것을 증명해보자. (이 밑부터 이해가 안됩니다..)
- 먼저 M을 알아보자. 임의의 skew-symmetric matrix는 = 이므로 이라 할 때, 다음과 같음.
- 이를 통해 을 알 수 있음 (?)
- 에 임의의 배수 가 더해지더라도, 는 성립하므로 다음을 만족함.
- 여기서 는 임의의 벡터이고, 일 경우 잘 작동함.
- 이제 를 계산해보자.이고, 우리는 식 24을 만족하는 , 를 찾는 것이 목적임. 이미 와 값을 알고 있으므로 및 을 대입하면,이 됨. 특히, 및 으로 두면 이 최소화 문제는 다음처럼 됨.
- 이때, 는 상수 값이므로 다음처럼 단순화 됨.
- 이는 W, b가 다음과 같을 때, a에 대한 least-squares인 를 풀어야하는 문제임.
- 를 계산한 후, 우리는 를 계산할 수 있으며 최종적으로 을 구할 수 있음.
- 먼저 M을 알아보자. 임의의 skew-symmetric matrix는 = 이므로 이라 할 때, 다음과 같음.

AI/ML, Computer Vision