1. Introduction
- Camera Model에서 우리는 3D world를 digital image로 변환하는 법에 대해 배웠다
- 카메라 파라미터, Calibration 등
- 이 강의에서는 카메라의 특성을 알고 있을 때, single image를 통해서 3D world의 구조를 복원하는 법과 single image에서 어떤 정보를 추론할 수 있는 지 알아보자.
2. Transformations in 2D
- 먼저 2D 공간에서 다양한 변환에 대해 알아보자.
- Isometric transformations은 거리를 유지하는 변환으로 물체의 움직임을 조절함. 가장 기본적인 형태로 rotation 과 translation 로 이뤄짐.
- 여기서 는 Isometric transformations 후의 point.
- 3개의 자유도를 가짐.
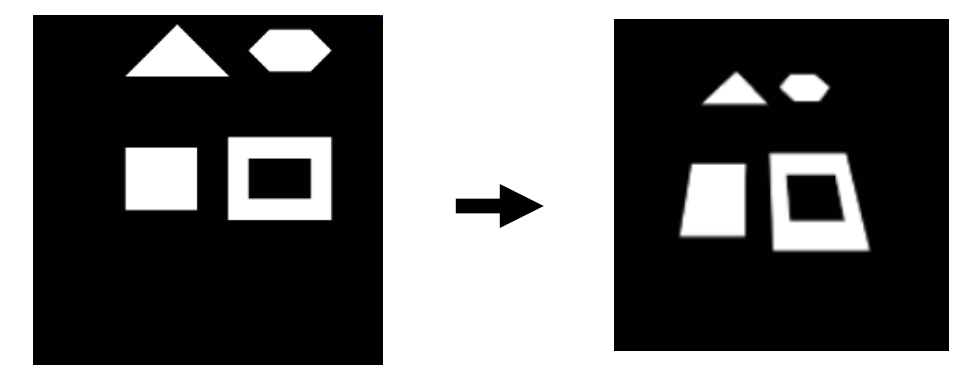
- Similarity transformations은 길이 비율과 각도를 유지하는 변환임. Isometric transformations에서 scaling을 포함한 것. (Isometric transformations는 scale이 1인 Similarity transformations로 볼 수 있다.)

- 4개의 자유도를 가짐.
- Affine transformations은 면적 비율, 선 길이 비율, 평행성을 유지하는 변환임. 임의의 벡터 에 대해 아핀 변환 는 다음과 같다. (A는 선형 변환). Homogeneous coordinate에서 표현은 다음과 같다.
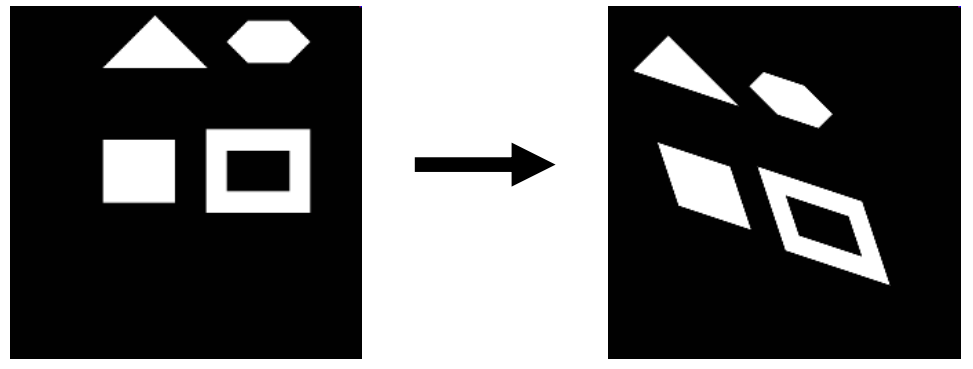
- Similarity transformations는 아핀 변환의 한 종류로 볼 수 있음.
- 6 자유도를 가짐.
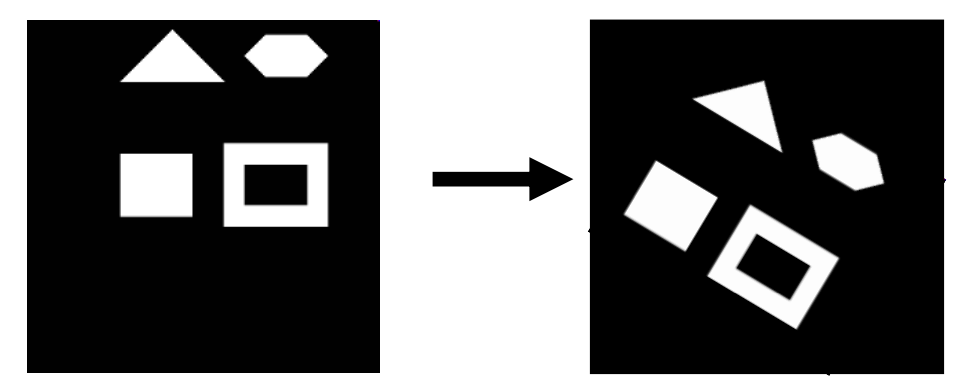
- Projective transformations (homographies)는 직선을 직선으로 맵핑하는 변환이지만, 평행성을 반드시 유지하지는 않음. 대신 점의 공선성(collinearity)을 유지하게 해줌. (즉, 점이 같은 선상에 있음을 보장함.)
- 아핀 변환의 더 일반화된 형태임.
3. Points and Lines at Infinity
- 이미지의 구조 결정에 직선은 매우 중요하므로 2D와 3D에서의 직선에 대해 알아보자.
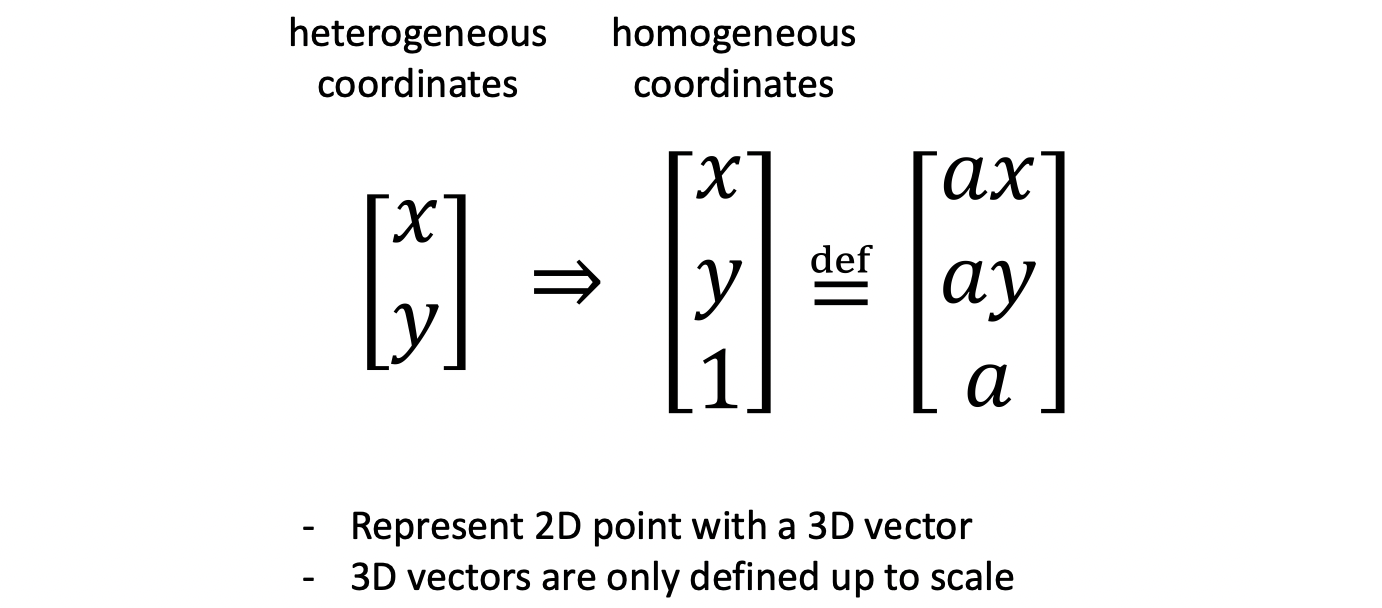
- 2D에서 직선은 으로 나타내고 이를 homogeneous vector로 나타내면 이다.
- 일반적으로 다음과 같이 정의됨.
- 일반적으로 다음과 같이 정의됨.
- 두 직선 , 이 한 점 에서 교차할 때, 이 점은 과 의 cross product(외적)로 정의됨.
- 평행선 경우에는 일반적으로 교차하지 않는다고 생각하지만, 무한대에서 교차한다고 할 수 있음. (철로를 사진 찍으면 실제 3D 세계에서는 평행하지만, image에서는 한 점에 모이는 현상을 말하는 듯)
- homogeneous coordinates에서 무한대의 점은 으로 나타낼 수 있음. (유클리드 좌표을 얻기 위해 마지막 0으로 나누면, , 가 무한이므로)
- 두 평행선 , 를 고려해보자. 두 선이 평행할 때, 기울기가 같고, 교점을 두 직선의 cross product로 구한다 했으므로 는 교점은 다음과 같다.
- 이 점을 ideal point(이상점)이라고 함. 의 기울기를 가지는 모든 평행한 직선은 이 ideal point에서 만난다.
- 두 평행선 , 를 고려해보자. 두 선이 평행할 때, 기울기가 같고, 교점을 두 직선의 cross product로 구한다 했으므로 는 교점은 다음과 같다.
- homogeneous coordinates에서 무한대의 점은 으로 나타낼 수 있음. (유클리드 좌표을 얻기 위해 마지막 0으로 나누면, , 가 무한이므로)
- 이러한 무한대 개념은 lines at infinity을 정의하는데 사용될 수 있음.
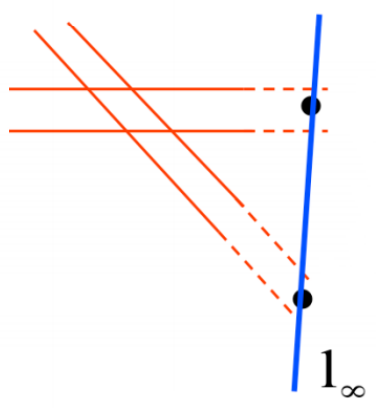
- n개의 평행선이 있다고 가정해보자. 각 평행선 쌍은 점에서 교차함.
- 이 점들을 통과하는 직선 은 모든 에 대해(), 를 만족하며 이는 을 의미함. 이때, c는 임의의 값이므로 로 정의할 수 있음.
- 무한대의 점 에서 Projective transformation 을 적용하면?
- 마지막 점이 0에서 변환 후 가 되었으므로 Projective transformation이 무한대의 점을 무한대가 아닌 점으로 맵핑하는 것을 뜻함.
- 무한대의 점 에서 Affine transformations을 적용하면?
- Affine transformations은 무한대의 점을 무한대로 맵핑
- 이제 Projective transformation 를 직선 에 적용하여 새로운 직선 를 만들어보자. 의 모든 점 가 을 만족해야 함.
- 항등 속성(identity property)을 이용하여 () 다음 식을 만들 수 있다.이때, Projective transformation은 직선을 직선으로 맵핑하는 변환이므로 새로운 직선 도 역시 을 만족하므로이다. 또한, 이고, 이므로 로 변환할 수 있음. 즉, 임을 알 수 있다.
- 항등 속성(identity property)을 이용하여 () 다음 식을 만들 수 있다.
4. Vanishing Points and Lines
- 지금까지 2D에서의 무한대 점과 직선의 개념을 배웠다. 이제 3D로 확장해보자.
- 이 3D에서는 planes 이라는 개념을 도입함.
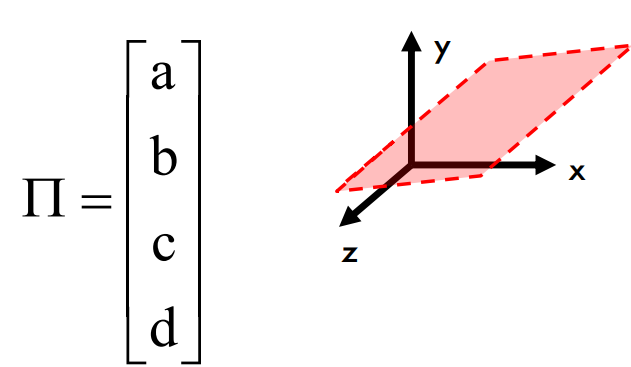
-
이 planes 을 벡터 로 나타낼 수 있으며,
- (a, b, c)는 planes에 대한 법선 벡터를 형성하고, d는 원점에서 법선 벡터 방향으로 planes까지의 거리를 나타냄.
-
- 3D에서 직선은 두 평면의 교차로 정의되며 절편 위치(intercept location)와 3개 차원의 각 기울기로 4개의 자유도를 가짐.
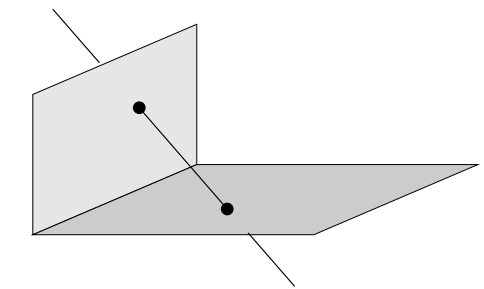
- 각 평면 상의 점을 통해 4개의 자유도를 가짐.
- 점은 2D와 비슷하게 정의됨. 무한대에 있는 점은 평행선의 교차점으로 정의됨.
- 또한, 에 있는 점에 Projective transformation을 적용하면 더 이상 무한대에 있지 않은 점 가 생김. 이를 vanishing point이라고 부름.
- 이 vanishing point을 통해 무엇을 할 수 있을까?
- 3D의 평행선, image에서의 corresponding vanishing(대응 소실점), 그리고 카메라 파라미터 K, R, T (intrinsic parameters인 K, extrinsic parameters인 회전 행렬 R, 변환 행렬 T)의 관계를 도출해보자.
- camera reference system에서 3D 평행선들의 집합의 방향 벡터 d = (a, b, c)가 있을 때, 이 선들은 무한대의 점에서 교차하며, 이를 image로 투영하면 vanishing point 가 생성됨.
- 일 때, 이므로 는 로 정의되며 이 식을 통해 를 도출할 수 있음.
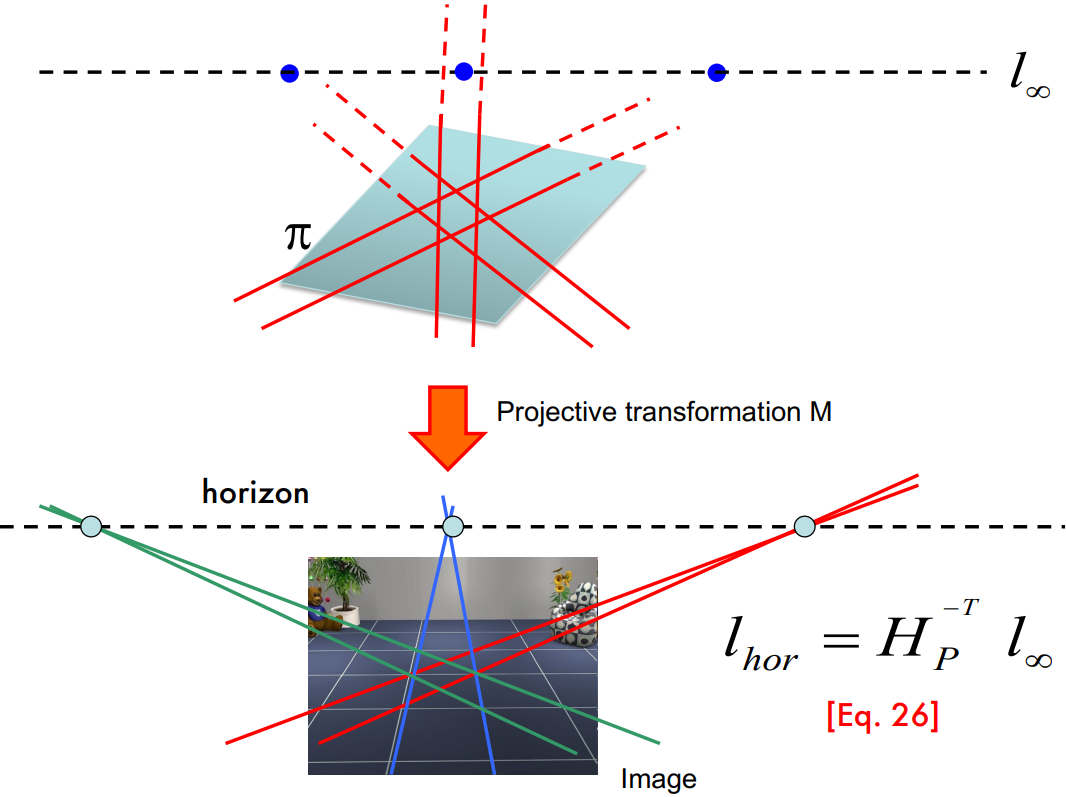
- 평면 을 평행선 집합의 집합 즉, Superset이라고 간주하면, 각 평생선의 집합은 무한대에서 한 점에 교차함.
- 이 무한대의 점들을 통과하는 직선은 lines at infinity인 임.
- 우리는 평면을 평행선 집합의 Superset으로 간주했으므로 이 직선은 평행한 두 평면이 교차하는 직선으로 정의됨. (바다 수평선 찍으면 이미지에서는 한 직선으로 모이는 것?)
- 에 Projective transformation을 적용하면 ‘무한대가 아닌 선’이 되고 이를 vanishing line(소실선) 또는 horizon line 라고 함.
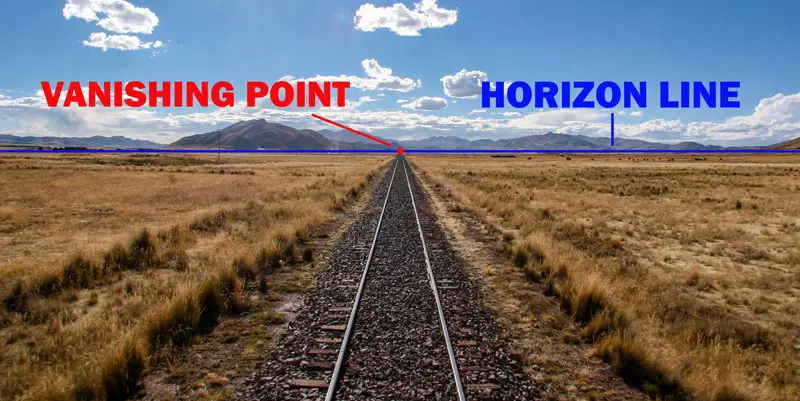
- 사진 출처 : https://mysketchjournal.com/how-to-draw-linear-perspective-without-vanishing-points/
- 이 horizon line은 vanishing point들을 지나는 직선이며 다음과 같이 계산됨.
- 은 수학적으로 명확하지 않는 image의 특성을 추론할 수 있게 함.
- 예를 들어, 위 사진처럼 이미지 좌표에서는 평행하지 않지만, 우리는 평행하다고 느끼는 이러한 특성을 추론할 수 있게 해줌.
- 또한, 3D에서의 평면의 법선 과 이미지의 사이에 관계를 도출 가능
- 이는 우리가 vanishing line을 인식할 수 있고, camera calibration이 되었다면 평면 의 방향을 추정할 수 있음.
- plane at infinity 라는 개념도 있음.
- 이 평면은 두 개 이상의 vanishing point에 의해 정의되며, Homogeneous coordinate에서는 벡터 로 표현됨.
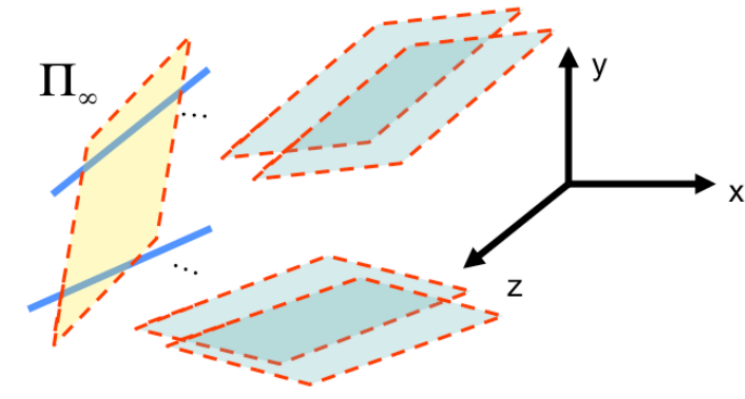
- 2개 (이상)의 vanishing lines (파랑선)으로 을 정의
- 이 평면은 두 개 이상의 vanishing point에 의해 정의되며, Homogeneous coordinate에서는 벡터 로 표현됨.
- 3D에서 평행한 두 쌍의 선이 각각 , 방향을 가지고, 무한대의 점 , 에 대응한다고 하자. , 가 vanishing point라고 할 때, , 사이의 각도 는 cosine law에 의해 다음과 같이 구해짐.

- 증명
- 이고 이므로
- 증명
- 이를 3D 평면으로 확장해보자
- 모든 평면에 대해서 vanishing line 과 법선 을 구할 수 있으므로 각 평면의 법선 벡터 , 사이의 각도를 계산하여 두 평면 사이의 각도 을 결정할 수 있음.
- vanishing line 과 에 대해 는 다음과 같음.
5. A Single View Metrology Example
- 3D 세계에서 두 개의 평면이 있는 이미지가 있고, 각 평면에서 평행한 선 한 쌍이 있다고 가정하자.
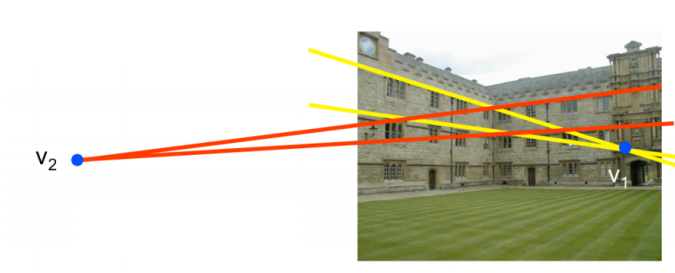
- 이 이미지에서 두 vanishing point 를 추정할 수 있으며, 우리는 두 평면이 (건물 평면이) 90도로 수직이라는 것을 안다.
- 이 경우, 식 (12)의 이다. 하지만, ω는 아직 알 수 없는 카메라 파라미터 에 의해 결정됨.
- 이 두 vanishing point을 아는 것만으로 를 추정할 수 있을까?
- K는 앞써 배웠던 것처럼 5개의 자유도를 가지고 있지만, 우리가 아는 것은 뿐이므로 불가능함.
- 따라서 또 다른 vanishing point이 필요하다. 밑 사진처럼 추가적인 vanishing point을 추정함.
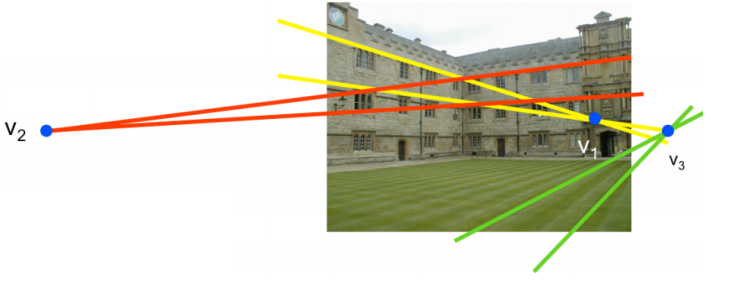
- 이를 통해 의 3개의 constraint을 알 수 있지만, 그래도 부족하다.
- 하지만 카메라가 zero-skew와 square pixels를 가진다는 가정을 하면에서 zero-skew으로 skewness = = 0, square pixels (가로 세로 픽셀 비율이 동일) = 이므로가 됨.
- 또한, homogeneous coordinate는 scale-invariant하므로 scale 변수는 임의로 지정하여, 실제 변수는 세 개로 줄어 듦.
- 이렇게 구한 를 통해 Cholesky 분해를 통해 K를 계산할 수 있음.
- K를 알면, 모든 평면의 3D을 재구성할 수 있음.

AI/ML, Computer Vision