❇️ 요약
- 행렬식 - determinant
- 여인수 - cofactor
- 여인수 전개 - cofactor expansion
- 행 연산에 의한 행렬식 변화 - Determinant changes by - row operations
📖 행렬식 개요
🔆 계수 - Rank, Pivot, Null space
-
matrix A의 Rank는 A의 column space의 dimension을 의미
-
column space의 basis vector가 몇 개 존재하는지 알면 그것이 dimension이 됨
-
예시 문제 - 주어진 행렬의 계수를 구해라
-
A를 row reduction을 통해 echelon form(행사다리꼴)으로 변환하고 pivot column을 찾음
-
pivot column 위치의 A의 column이 A의 basis
-
pivot column이 3개 존재하므로 rank A는 3
추가적으로 null space의 dimension도 구할 수 있음
free variable이 2개 이므로 dim Null A = 2
Null space의 dimension은 free variable의 개수와 같음
-
🔆 1. 2 × 2 Matirx
- 2 × 2 행렬에서의 determinant가 nonzero이면 invertible
🔆 2. 3 × 3 역행렬이 존재하는 행렬 - 3 x 3 invertible matrix
- 3 × 3 이상 행렬 부터는 determinant를 구하는 것이 복잡
- determinant가 0이 아닌 것의 의미는 모든 row에 pivot이 존재한다는 의미
- row reduction을 진행하고 모든 pivot이 nonzero임을 확인하면 됨
- 여기서 는 다음과 같다.
- 가 invertible이므로 은 nonzero이여야만 함
- 2 × 2 matrix에서 determinante는 아래와 같으므로 을 다음과 같이 표기 할 수 있음
- 은
1th row와3th column을 제외한 요소들을 의미
- 가 위와 같이 주어졌을 때 은 다음과 같이 표기할 수 있음
3th row와2th column을 제거하면 아래와 같이 됨
🔆 3. 행렬식 - Determinant
- 2 x 2 이상 matrix 일때 determinant 결정 방법은 다음과 같다.
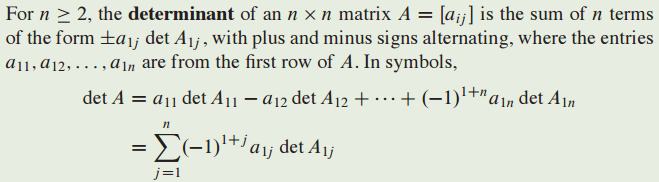
- determinant의 정의는 다음과 같다.

- 예시문제 : 행렬이 주어졌을 때 determinant를 계산하는 문제
- determinant를 간단히 표현
- | | 행렬 = def 행렬 표현
🔆 4. 여인수 - Cofactor
- cofactor를 이용해서 determinant를 여러가지 형태로 표현
- 이를 여인수 전개(confactor expansion)라고 함
- confactor의 부호는 는 다음과 같은 규칙을 가짐
🔆 5. 이론 1 - Theorem 1
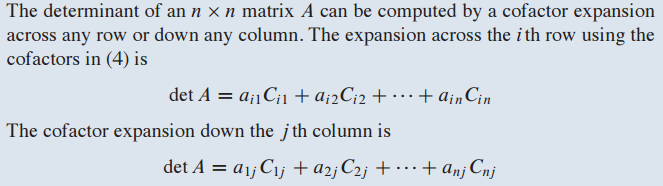
- cofactor expansion을 이용하면 임의의 row와 column으로 determinant를 표현 가능
- 어떤 cofactor를 이용하더라도 결과는 동일
- cofactor를 이용할 때 zero가 많은 row나 column을 기준으로 cofactor expansion을 이용하면 계산이 단순해짐
- 예시문제 : A가 주어졌을 때 det A를 cofactor expansion을 사용해서 계산하는 문제
- 예시문제 2 : 0이 많이 구성되어 있는 matrix는 다음과 같이 cofactor expansion을 사용 가능
- first column에 0이 제일 많으므로 이를 기준으로 cofactor expansion을 사용
- first column에 0이 제일 많으므로 이를 이용
- 0이 많은 row나 column을 이용하면 cofactor expansion을 유용하게 이용할 수 있음
🔆 6. 이론 2 - Theorem 2

- A가 삼각 행렬(triangular matrix)이면 det A는 A의 digonal term을 곱한 것
🔆 7. det EA = (det E)(det A)
- 는 기본 행렬(elementary matirx)를 의미
- 는 와 동일
- 은 interchange
- 는 second row k scaling
- 은 second row에 k scaling한 것을 first row에 더한 replacement
- 는 first row에 k scaling 한 것을 second row에 더한 replacement를 의미
- 각 은 다음과 같다
- 를 증명하는 과정
🔆 8. 수치적인 메모 - Numerical Note
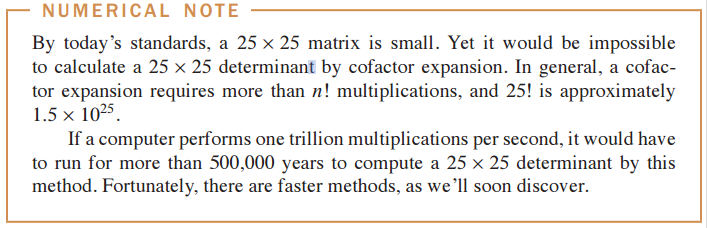
- cofactor expansion이 복잡하다는 내용
- cofactor expansion으로 를 구하는 연산은 이 소요되므로
- 를 cofactor expansion으로 계산하는 것은 멍청한 짓이라는 말로 해석 가능
📖 행렬식 성질
🔆 1. 이론 3. 행 연산 - Theorem 3. Row Operations
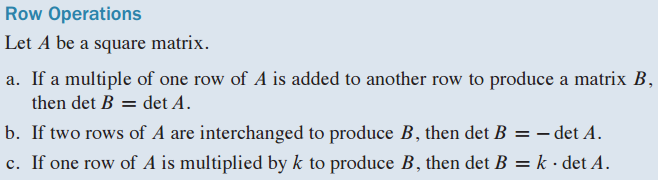
- a. A의 하나의 row 곱이 다른 row에 더해져 B 행렬이 만들어지면
- 이는 row replacement를 의미
- b. B를 만들기 위해 A의 두개의 row가 interchange 됐으면
- c. A의 하나의 row에 k가 곱해져 B가 만들어졌으면
- scaling을 의미
- 이 세가지 성질을 이용해서 row reduction을 통해 echlon form을 만든 후 cofactor expansion을 이용하면 det를 쉽게 구할 수 있습니다.
- 와
- 는 행렬에 row reduction을 사용하여 만들어진 echelon form(행사다리꼴)이라고 가정하면 로 표현
- 각각의 row operation은 두 개의 row에 영향을 끼치므로 영향을 받지 않은 row를 기준으로 cofactor expansion을 사용하면 를 쉽게 구할 수 있다.
- 예시
- row reduction을 사용하여 echelon form으로 변환하면 det A를 쉽게 구할 수 있음
-
echelon form(행사다리꼴)은 triangular matrix이므로 각각의 diagonal term을 곱하면 det을 구할 수 있음
-
이는 echelon form에서 각각의 pivot들의 곱을 의미
-
row operation 성질을 이용해서 elementary matrix의 를 곱하면 가 나오게 됨
-
간단하게 정리
- A가 not invertible이면 pivot이 0인 row가 존재하게 되어 pivot들의 곱이 0이 되게 됨. 따라서
🔆 2. 수치적인 메모 - Numerical notes
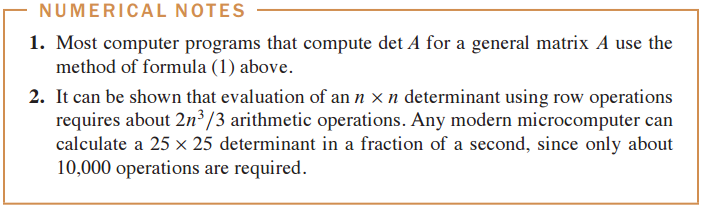
- cofactor expansion을 사용해서 determinant를 구하면 의 연산이 필요
- 하지만 row operation을 이용하면 방법은 의 연산이 필요하므로 25 x 25이상의 행렬도 빠르게 계산 가능
🔆 3. 이론 4. - Theorem 4

- 이 아니면 A는 invertible
- A가 not invertible이면
- A가 다음과 같이 주어졌을 때 이 나오므로 A는 not invertible matrix
🔆 4. 이론 5 - Theorem 5

- 의 det과 det A는 동일
🔆 5. 이론 6. 곱셈의 성질 - Multiplicative Property

- A와 B가 다음과 같이 주어졌을 때 가 성립하는지 확인
- ❗주의. det(A + B)는 det A + det B와 동일하지 않다.