Point Cloud 의 Surface Roughness 를 구하기
Point Cloud 형태와 IMU 데이터의 상관관계를 알기 위한 1차 시도
Point Cloud 와 IMU 데이터
Point Cloud 를 분석하면 지표면의 울퉁불퉁한 정도 (Bumpiness) 를 알 수 있다. 이 Bumpiness 를 어떻게 정의할 것이고, 이 요소가 주행에 어떤 영향을 미치는지 알아보자.
목표 : Surface Roughness 로부터 예측된 IMU 데이터값을 기반으로 Point Cloud 를 단계별로 분류하기
이때 Ground Truth 는 IMU 데이터값으로부터 얻을 수 있으므로 , 이 두 데이터간의 상관관계를 분석한다면 Point Cloud 만 있어도 IMU 값을 예측할 수 있을 것이라고 생각했다.
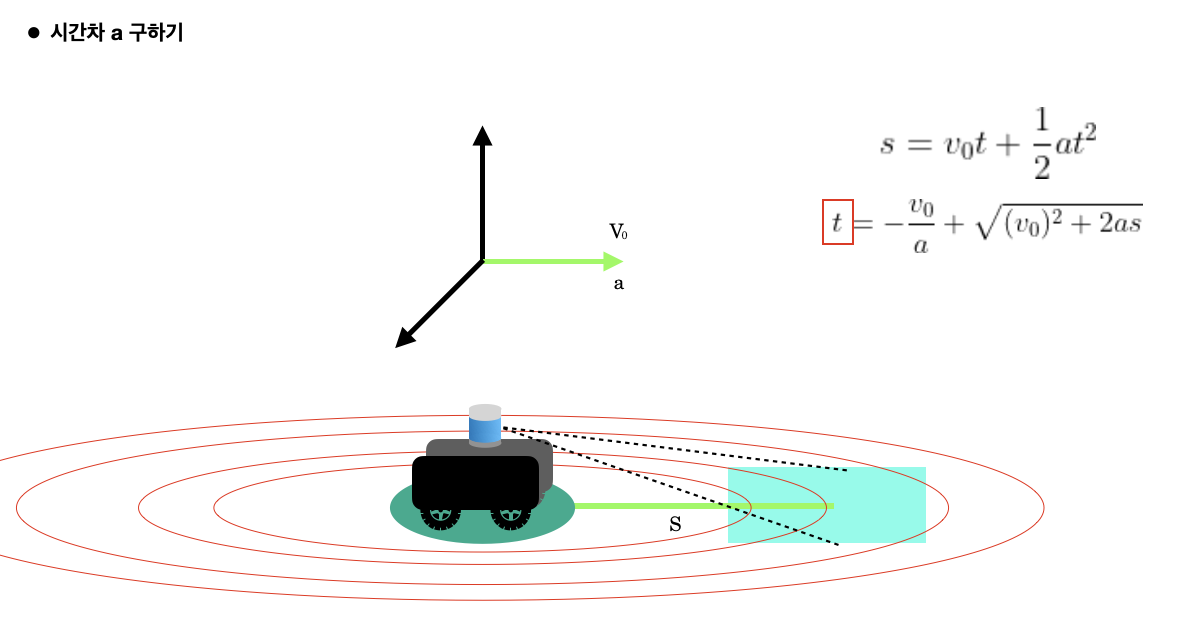
획득 시점 차이
우선 IMU 데이터값과 Point Cloud 분포에 따른 상관관계를 알기 위해서는 '획득 시점 차이' 라는 문제를 해결해야 했다.
예를 들어,
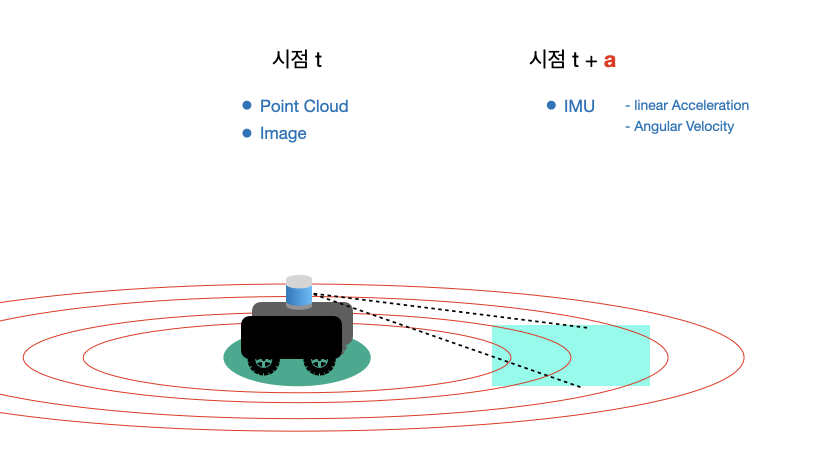
다음과 같이 시점 t 에서 imu 는 로봇이 위치한 영역에 대한 데이터를 획득하지만, LiDAR 와 Camera 는 '앞에 보이는 영역' 에 대한 데이터를 획득한다.
따라서 특정 영역에 대해서 PC 데이터와 그에 해당하는 IMU 데이터를 얻기 위해서는 시점 차이 (a) 를 계산해야 한다고 생각했다.
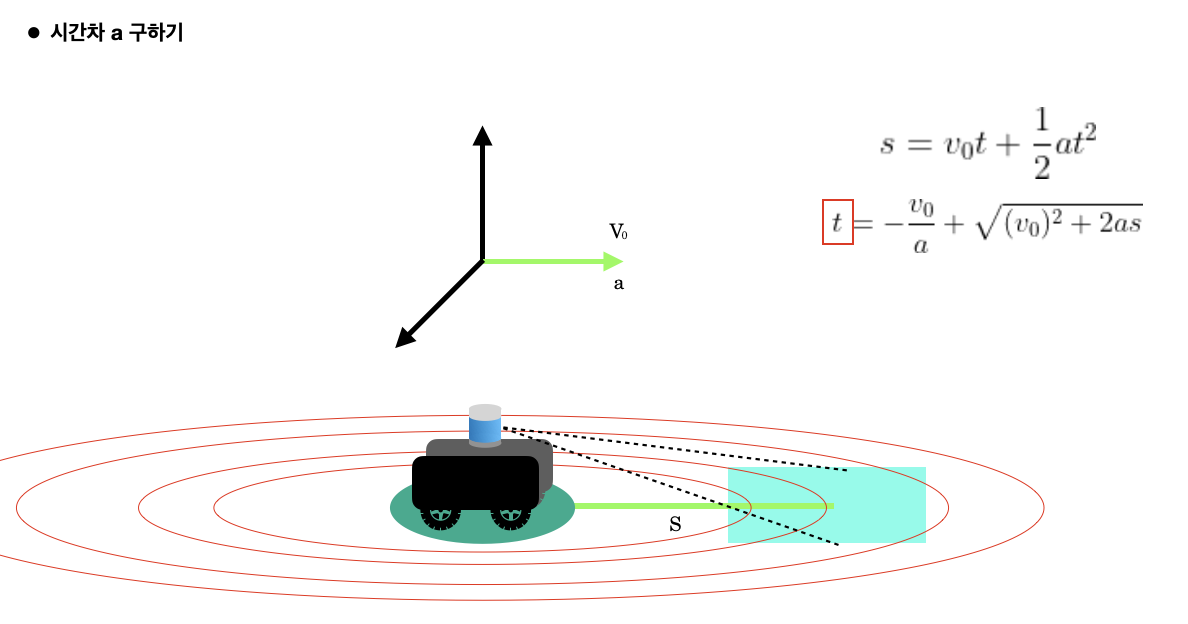
IMU 데이터를 이용하면 Linear Acceleration, Angular Velocity 값을 얻을 수 있으므로 이를 이용해서 a 값을 추정했다.
획득 시점에 따라 데이터셋 저장하기
사용 데이터셋 : RELLIS-3D Dataset
나는 이 문제를 DNN 으로 해결하고 싶었기 때문에 다음 데이터들을 세트로 저장했다.
- t 시점의 Point Cloud
- t 시점의 image
- t+a 시점의 IMU 데이터
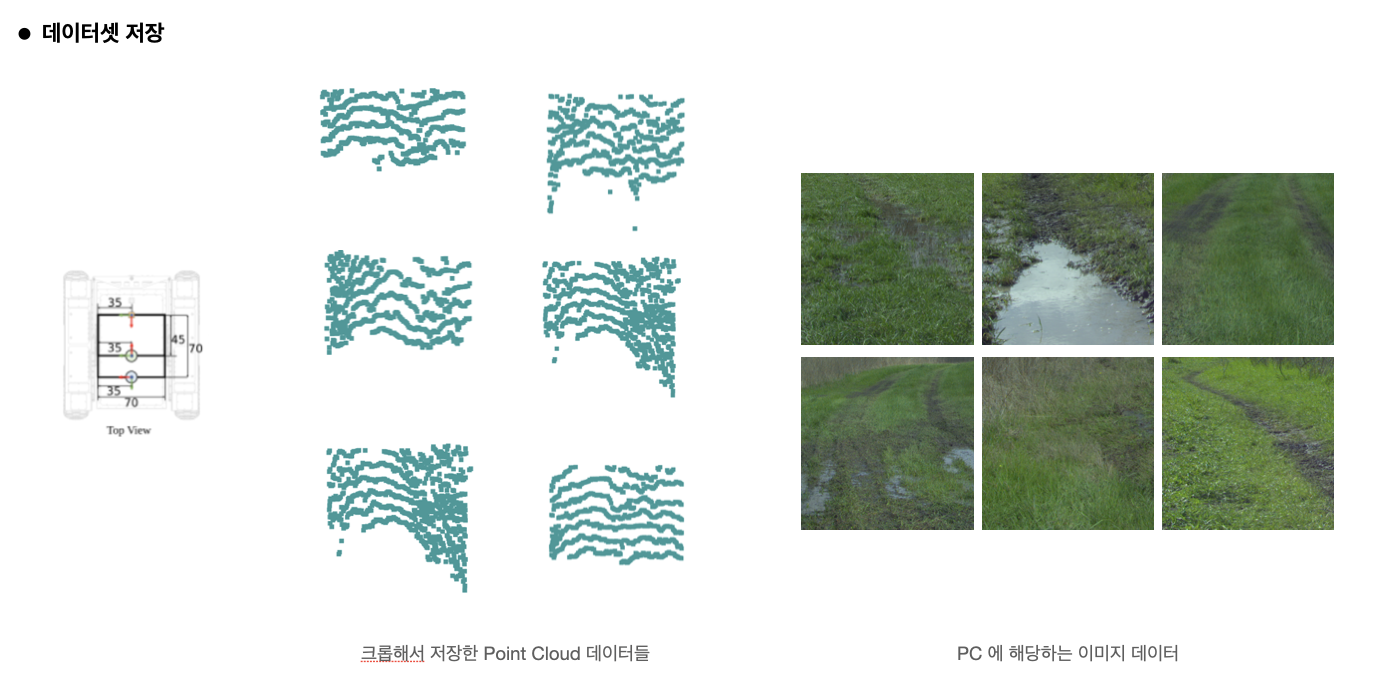
이때 Point Cloud 는 모바일 로봇 크기만큼 잘랐고, IMU 속도 데이터에서 추산한 시점 차이에 대한 오차를 줄이고자 로봇 바로 앞의 PC 데이터를 사용했다. 사진도 PC 와 동일한 영역을 가리키도록 잘라서 저장했다.
Surface Roughness
DNN 모델을 구성하기 위해서 Point Cloud 에서 Feature 을 뽑아내 수치화할 필요가 있다고 생각했다.
Point Cloud 에서 사용할 수 있는 수치들은 다음과 같다.
- Normal Vector
- Intensity
- Moment Of Inertia
- Curvature
- Surface Area
- Bag of words
...
이 중 Normal Vector 와 Intensity 를 사용하였다.
순서
- Normal Vector 구하기
- 중심점으로부터 현재 점으로의 벡터 구하기
- Covariance Matrix 의 Eigen Value, Eigen Vector 구하기
- PC 중심과 점까지의 벡터와 EigenVector 내적하기
- 이들의 평균 구하기

원리 Concept
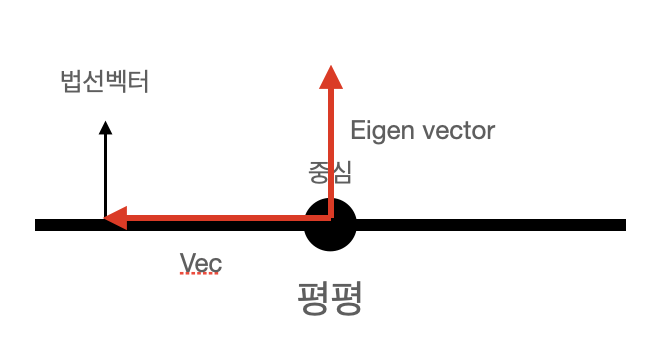
(출처 : 공돌이의 수학정리노트)
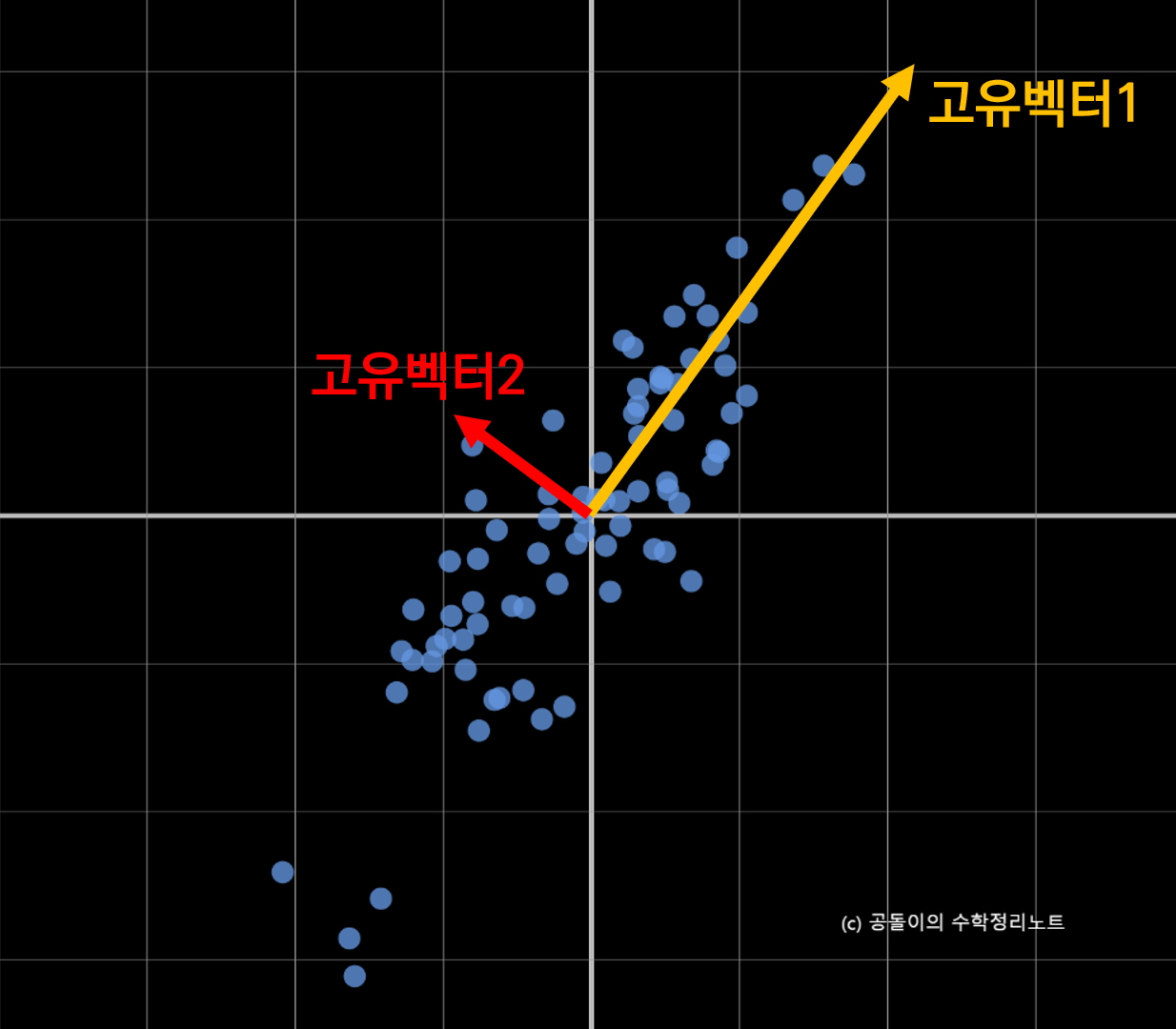
공분산 행렬의 고유 벡터는 데이터가 어느 방향으로 분산되어 있는지를 나타내 준다.
만약 포인트 클라우드가 평평하게 분포하고 있을 경우, Eigen Vector 의 방향은 "데이터가 덜 분포하는 방향' 을 향하기 때문에 사진에 표시된 것 처럼 수직하게 형성될 가능성이 높다.
이때 vec 이 데이터 분포의 중심으로부터 점까지의 벡터이고,
pc가 평평할 수록 이 둘의 내적값이 0에 가까우므로 Pseudo Code 에 따라 구한 roughness 값은 pc 의 분포가 평평하지 않을 수록 클 것이다.
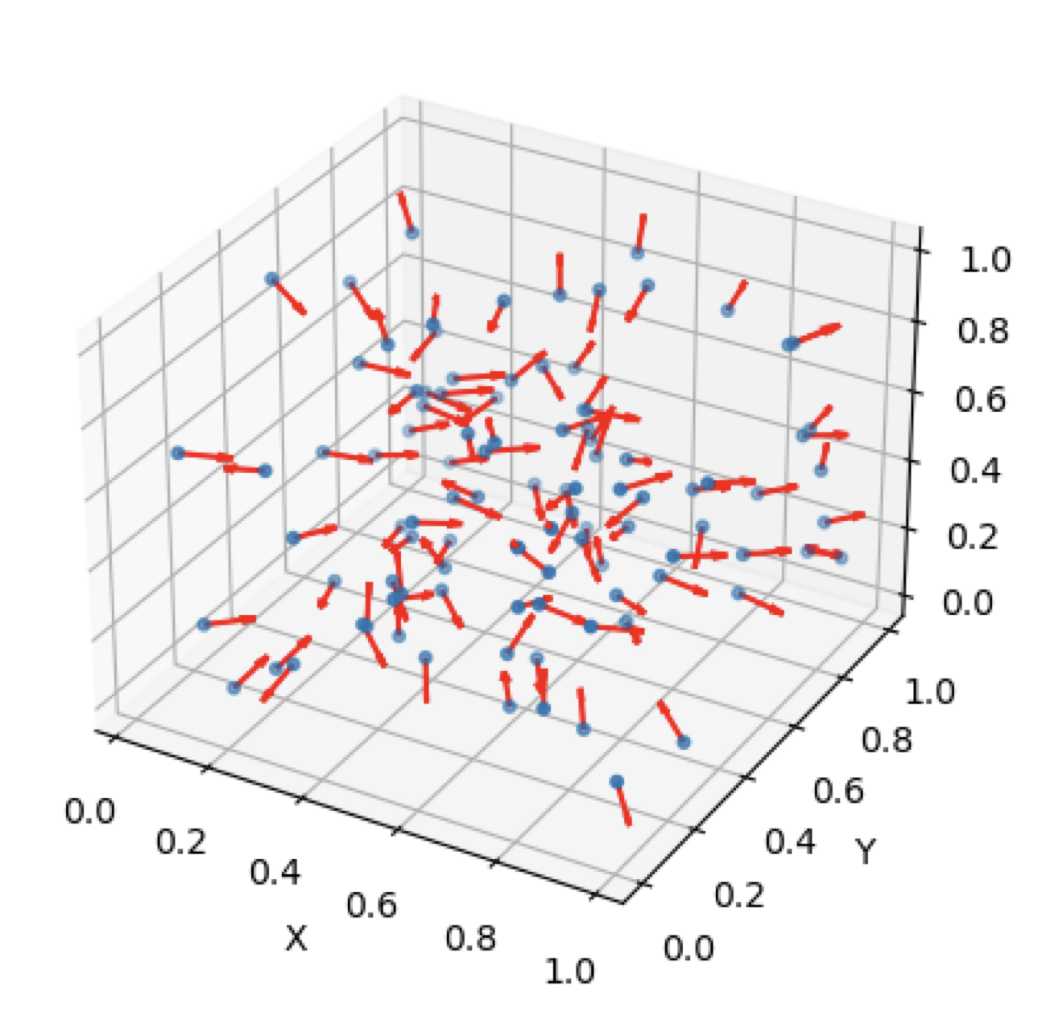
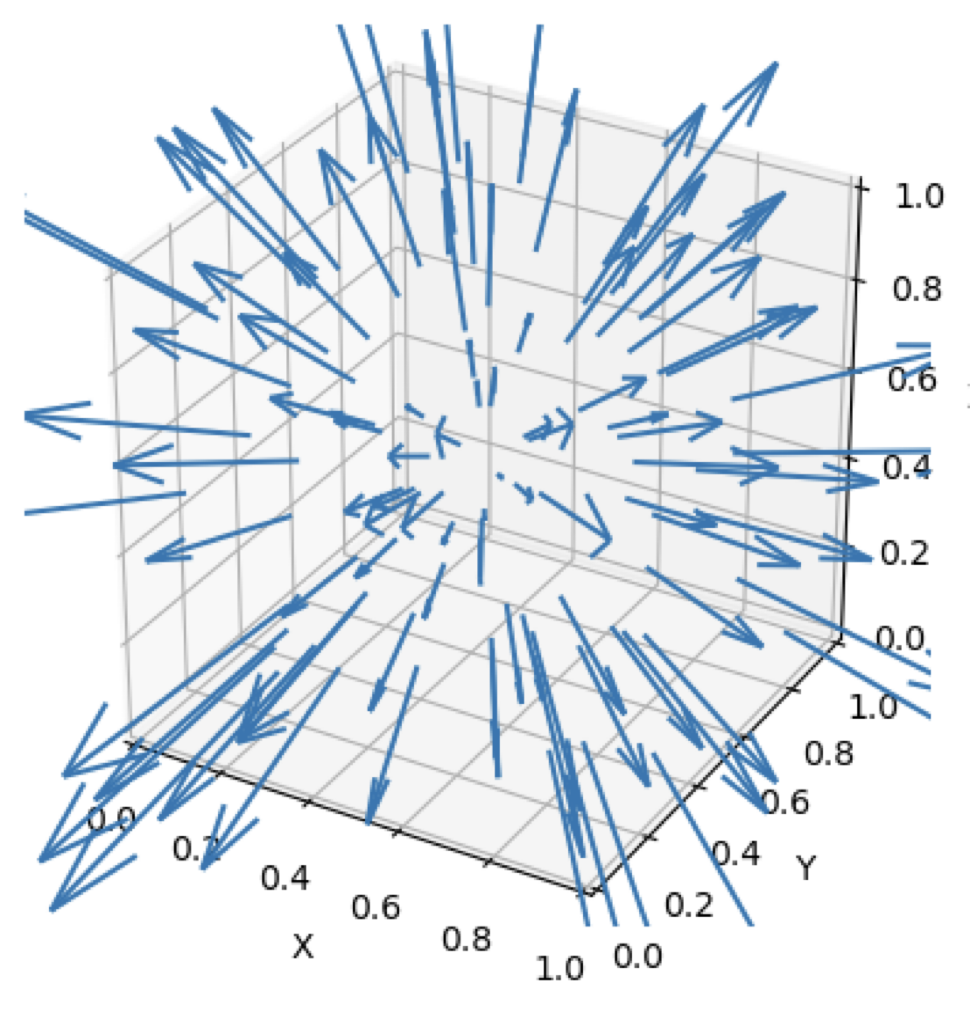
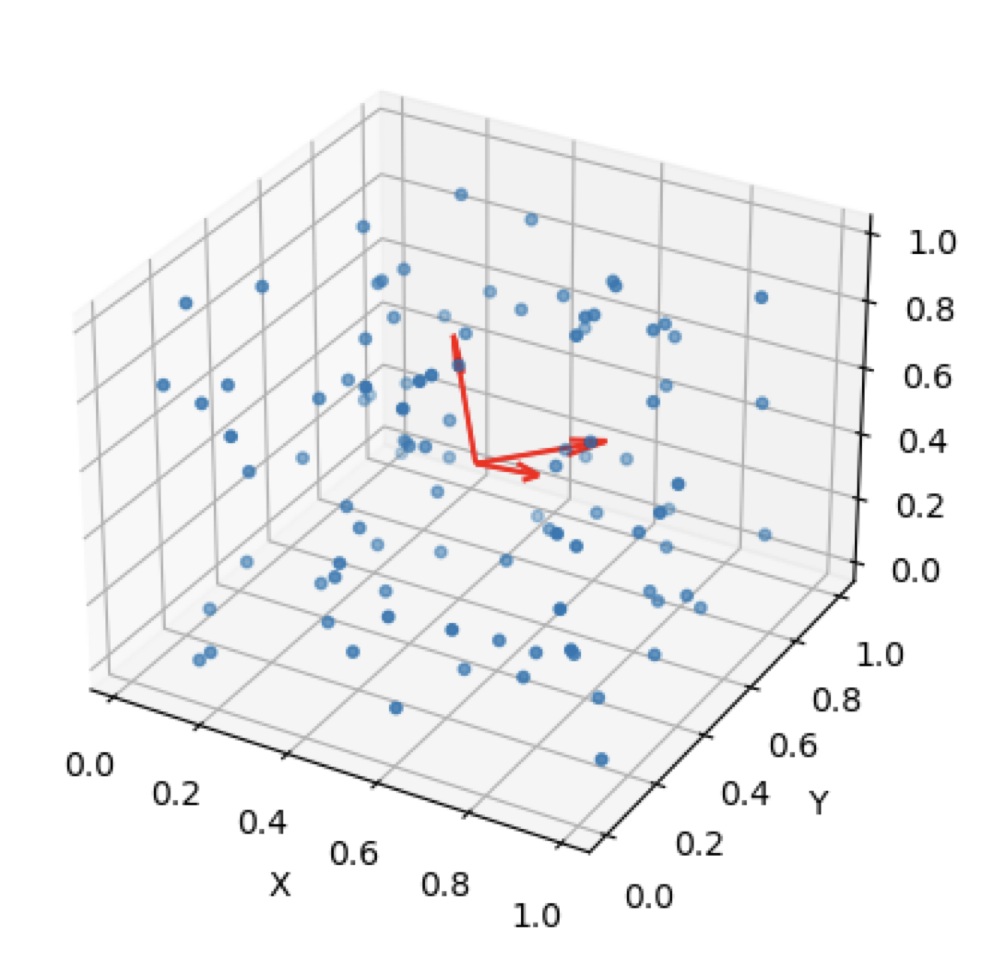
1. Normal Vector 구하기
import numpy as np
import open3d as o3d
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# 임의의 3D 데이터 생성
num_points = 100
x = np.random.rand(num_points)
y = np.random.rand(num_points)
z = np.random.rand(num_points)
# Open3D의 PointCloud 객체로 변환
pcd_ori = o3d.geometry.PointCloud()
pcd_ori.points = o3d.utility.Vector3dVector(np.column_stack((x, y, z)))
# 법선 벡터 계산
pcd_ori.estimate_normals()
# 3D 산점도 그리기
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
# 포인트를 산점도로 그리기
ax.scatter(x, y, z, s=10)
# 법선 벡터를 화살표로 그리기
for i in range(len(pcd_ori.normals)):
point = pcd_ori.points[i]
normal = pcd_ori.normals[i]
ax.quiver(point[0], point[1], point[2], normal[0], normal[1], normal[2], length=0.1, normalize=True, color='r')
# 축 레이블 설정
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
plt.show()2. 중심점으로부터 현재 점으로의 벡터 구하기
3. Covariance Matrix 의 Eigen Value, Eigen Vector 구하기
검증
Gaussian Distribution 의 분산값을 조정해서 Flat Data, Rough Data 를 임의로 생성한 후 시각화하였다.

각각에 대해 Surface Roughness 를 구한 결과,

예상했던 결과대로 Flat 한 데이터보다 Rough 한 데이터에서 Surface Roughness 값이 더 높게 나타났다.
데이터 분석
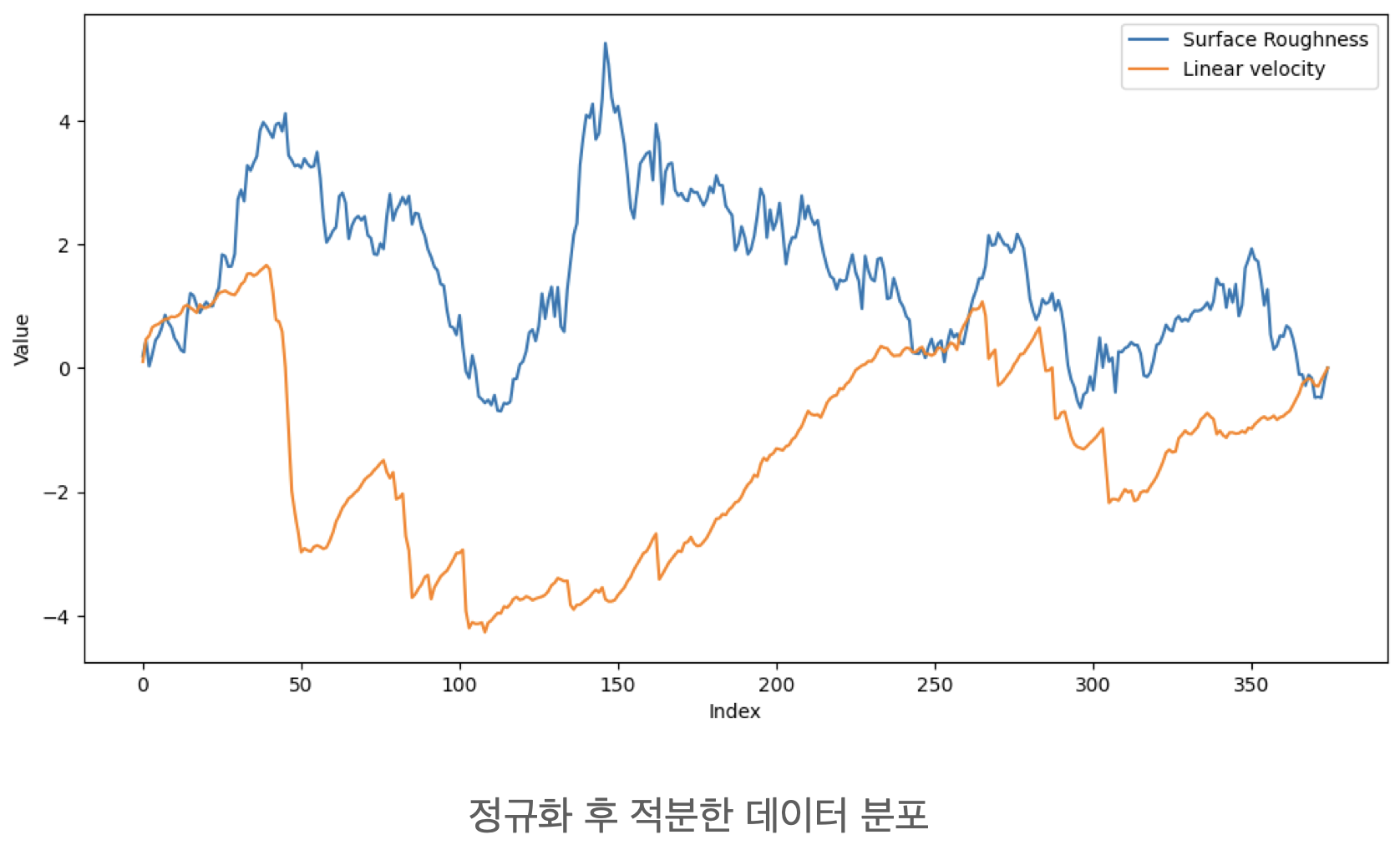
1. 데이터 사이의 상관 관계
데이터 개수 : 각 425개
- Surface Roughness 그래프

- Surface Roughness, Linear Acceleration, Angular Velocity 그래프

Raw 데이터만 가지고는 상관관계를 알기 어려웠기 때문에, 이를 정규화한 후 적분하였다.
2. DNN 모델
- 전처리 및 Correlation Coefficient 계산
import numpy as np
import torch
import matplotlib.pyplot as plt
def remove_outliers(linear_acceleration_list, angular_velocity_list, roughness_list):
indices_to_remove = []
for i, r in enumerate(roughness_list):
if r < 1.525:
indices_to_remove.append(i)
linear_acceleration_list = np.delete(linear_acceleration_list, indices_to_remove, axis=0)
angular_velocity_list = np.delete(angular_velocity_list, indices_to_remove, axis=0)
roughness_list = np.delete(roughness_list, indices_to_remove, axis=0)
return linear_acceleration_list, angular_velocity_list, roughness_list
linear_acceleration_list = remove_outliers(linear_acceleration_list, angular_velocity_list,roughness_list)[0]
angular_velocity_list = remove_outliers(linear_acceleration_list, angular_velocity_list,roughness_list)[1]
roughness_list = remove_outliers(linear_acceleration_list, angular_velocity_list,roughness_list)[2]
values = []
for fn in filenames:
with open(f'list/{fn}') as file:
arr = torch.tensor(eval(''.join(file.readlines())))
arr = arr - arr.mean()
arr = arr / arr.abs().max()
arr = arr.cumsum(dim=0)
values.append(arr)
x = torch.arange(len(values[0]))
angular_vel, linear_vel, roughness = values
labels = ['roughness', 'velocity']
plt.figure(figsize=(12,6))
print(np.corrcoef(roughness.numpy(), linear_vel.numpy()))
- DNN 모델
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import DataLoader, Dataset
import random
# 데이터셋 클래스 정의
class RoughnessDataset(Dataset):
def __init__(self, roughness, linear_vel):
self.roughness = roughness
self.linear_vel = linear_vel
def __len__(self):
return len(self.roughness)
def __getitem__(self, idx):
return (self.roughness[idx], self.linear_vel[idx])
class RoughnessModel(nn.Module):
def __init__(self):
super(RoughnessModel, self).__init__()
self.fc1 = nn.Linear(1, 10) # Fully Connected Layer 생성
self.fc2 = nn.Linear(10, 10)
self.fc3 = nn.Linear(10, 1)
self.relu = nn.ReLU()
def forward(self, x):
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return x
learning_rate = 0.001
batch_size = 16
num_epochs = 100
dataset = RoughnessDataset(roughness, linear_vel)
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
model = RoughnessModel()
criterion = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
for epoch in range(num_epochs):
for batch_idx, (data, target) in enumerate(dataloader):
optimizer.zero_grad()
data = torch.tensor(data).float()
target = torch.tensor(target).float()
output = model(data.unsqueeze(1).float())
loss = criterion(output, target.unsqueeze(1))
loss.backward()
optimizer.step()
if epoch % 10 == 0:
print('Epoch [{}/{}], Loss: {:.4f}'.format(epoch+1, num_epochs, loss.item()))
torch.save(model.state_dict(), 'roughness_model.pt')
with torch.no_grad():
input = torch.tensor([0.5])
output = model(input.unsqueeze(0).float())
print('Predicted linear velocity:', output.item())
#검증
test_dataset = RoughnessDataset(roughness, linear_vel)
# 검증용 데이터셋에서 무작위로 샘플 추출
sample_indices = np.random.choice(len(test_dataset), 100, replace=False)
test_samples = [test_dataset[i] for i in sample_indices]
model = RoughnessModel()
model.load_state_dict(torch.load('roughness_model.pt'))
# 모델 검증 및 정확도 출력
with torch.no_grad():
correct = 0
total = 0
for data, target in test_samples:
data = torch.tensor(data).float() # NumPy 배열을 PyTorch 텐서로 변환
target = torch.tensor(target).float()
output = model(data.unsqueeze(0)).item() # unsqueeze() 메서드는 PyTorch 텐서에서 사용 가능
predicted = round(output)
actual = round(target.item())
if predicted == actual:
correct += 1
total += 1
accuracy = correct / total
print('Accuracy: {:.2f}%'.format(accuracy * 100))- 학습된 모델의 예측값 시각화
#학습된 모델의 예측값 시각화
import matplotlib.pyplot as plt
model = RoughnessModel()
model.load_state_dict(torch.load('roughness_model.pt'))
# 예측값 시각화용 roughness 리스트 생성
test_roughness = np.linspace(0, 1, 100)
with torch.no_grad():
model.eval()
test_inputs = torch.tensor(test_roughness).float().unsqueeze(1)
predicted_outputs = model(test_inputs).squeeze(1)
plt.plot(test_roughness, predicted_outputs, label='Predicted')
plt.xlabel('Roughness')
plt.ylabel('Linear velocity')
plt.title('Predicted linear velocity vs. roughness')
plt.legend()
plt.show()3. 결과
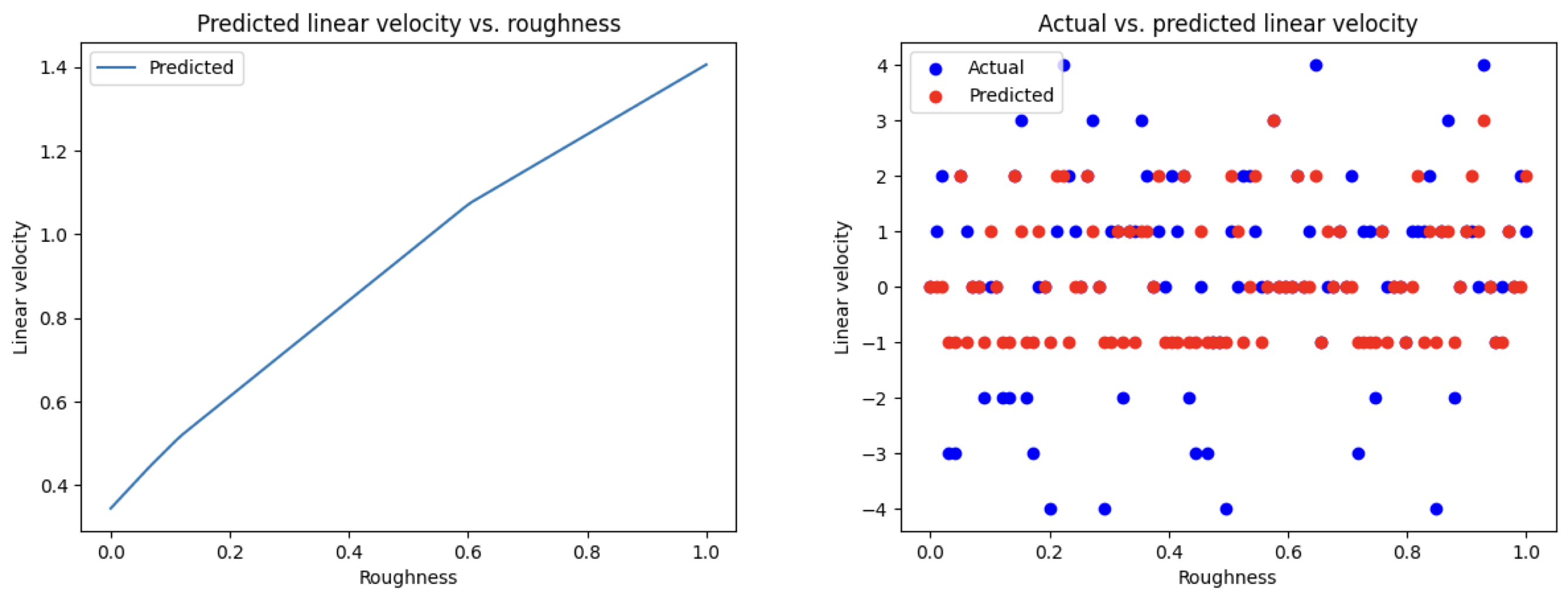
모델 학습 결과는 다음과 같다.
피드백
교수님께서 해 주신 말씀음 다음과 같다.
- IMU 센서는 노이즈가 많은데, 이 값을 적분해서 속도를 구해 시간차를 구하는 과정에서 너무나 많은 불확실성이 있다.
- IMU 데이터 중 Linear Acceleration 값을 사용한 이유가 명확하지 않다.
- 같은 이유로, 도로의 울퉁불퉁함과 IMU 데이터 사이의 상관관계가 불분명하다.
- 모델의 정확도가 높다고 하는건 아무 의미가 없다. 왜냐면 넣은 데이터대로 그냥 학습하는 것 뿐이기 때문에.
- 데이터 사이의 상관관계가 없어 보인다.
- Surface Roughness 라는 수치들 간의 차이가 너무 적다.
