[논문] Road Roughness Detection by Analysing IMU Data
1. Introduction
도로의 거칠기 (Roughness of Road) 는 도로의 편안함과 안전을 나타내는 가장 중요한 지표 중 하나이다. 도로의 안정성을 평가하기 위해 GPS/INS, 카메라 등 다양한 센서가 사용되었지만 다양한 어려움이 있었다.
따라서 본 논문에서는 IMU 데이터에서 도로 거칠기 정보를 추출하는 방법을 제안한다. 이는 GIS (데이터 관리, 분석, 시각화 등) 에 부담을 주지 않고, 현재 많은 내비게이션 제품에서 매우 쉽게 채택될 수 있다. 즉, 다른 추가 센서와 추가 비용으로 도로 거칠기 정보를 얻기 위해 대규모 측정을 다시 수행할 필요가 없다는 장점이 있다.
1.2 목표
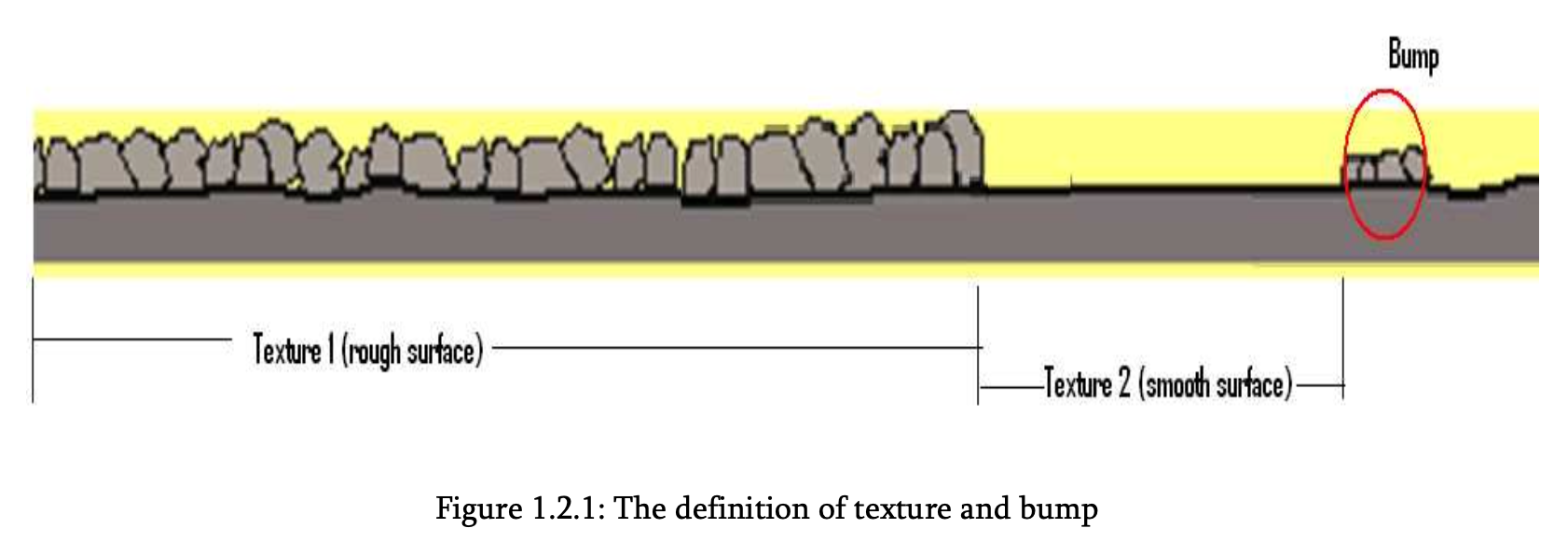
도로의 거칠기를 표현하기 위해 Texture 와 Bump 라는 두 가지 주요 요소에 대한 개념을 도입했다.
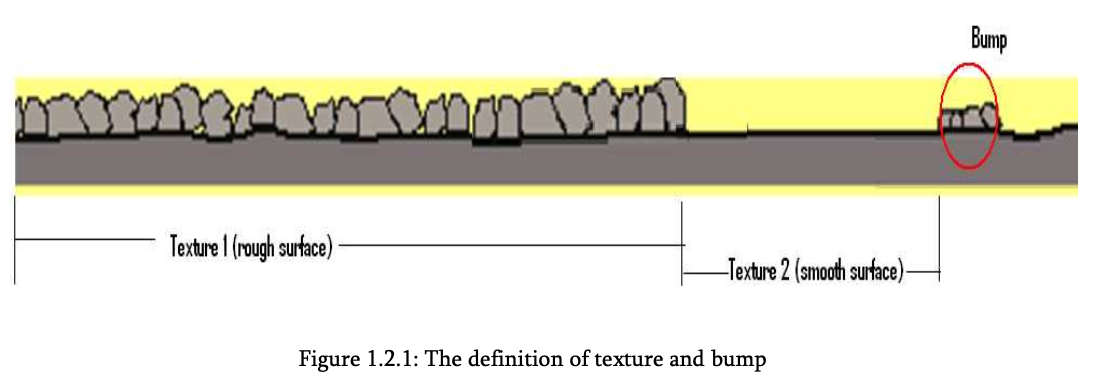
Texture 는 도로 구간의 전반적인 특성을 설명하는데 사용된다. Bump 는 도로 표면에 우발적인 충격을 설명해는 데 사용된다.
분류(Classification)는 Texture를 설명하는 주요한 방법이다. Bump 의 크기와 위치도 찾아, 이 두 가지 정보를 융합하여 Roughness of Road 를 지도에 시각화하는 것이 목표이다.
1.3 한계
목표를 달성하기 어렵게 만드는 몇 가지 문제가 있다.
- IMU 가 차량 내부에 고정되어 있기 때문에, 도로의 거칠기를 감지하기 위한 4개의 바퀴를 고려하면 (차량 전체와 도로 범프의 위치)가 약간의 차이가 있을 수 있다.
- 자동차 서스펜션 효과 때문에 IMU 데이터 분석을 기반으로 도로 범프의 진폭에 대한 정확한 정량적 정보를 얻기가 어렵다.
- 예측값을 평가할 실제 데이터가 없다.
- Classification Threshold 가 경험적으로 구축되어 있다.
2. Literature Review
2.1 Roughness 측정 시스템 및 Roughness 지수
Roughness 는 진동을 유발하는 도로를 따라 표면 고도의 변화로 정의된다.
널리 사용되는 지수로는 IRI (International Roughness Index), RN (Ride Number), PI(Profile Index) 등이 있다.
기존의 도로 거칠기 시스템은 종종 세 가지 유형으로 분류된다. 처음 두 가지 유형은 각각 정적 직접 측정 (static direct measurement), 동적 직접 측정 (dynamic direct measurement) 이다.
-
static direct measurement
이 방법은 접촉 센서를 사용해 도로 표면의 수직 변위를 측정한다. 오차가 적다는 장점이 있지만 작업 속도가 느리고 인력 투입이 필요해 대규모 도로 조사에 적합하지 않다. -
dynamic direct measurement
차량의 동적 반응을 측정해 노면의 거칠기를 파악한다. 가속도계와 기타 센서를 사용해 도로의 거칠기로 인한 차량 서스펜션 시스템의 가속도와 변위를 측정한다. 이 방법은 static 방법보다 빠르고 적은 인력이 필요하지만, 전문적인 장비가 필요하며 차량 속도와 하중 같은 외부 요인에 영향을 받을 수 있다. -
RTRRMS (Response Type Torad Roughness Measurement System)
차량에 장착된 계측기를 사용해 수행된다. 자동차의 총 누적 서스펜션 편향을 측정한다.
2.2 GPS / INS 모바일 측정 / 매핑 시스템과 통한된 Roughness Measurement
3. Data Acquisition
3.1 Equipments
4. Methodology
특정 방향의 순간 가속도 및 회전 가속도를 기록하는 IMU 의 신호는 자동차의 진동에 따라 변경된다. 이 아이디어를 바탕으로 우리는 도로의 거칠기와 IMU 신호 사이에 일정한 관계가 있다고 가정했다.
IMU 데이터는 실제로 6개의 개별 디지털 신호이다.
일반적으로 이산 신호를 분석하는 데는 시간 영역 분석과 주파수 영역 분석의 두 가지 관점이 있다. 어떤 정보는 시간 영역에서 시각화하기 쉽고, 어떤 정보는 주파수 영역에서 시각화하기 쉽다.
- 범프 감지 방법
범프를 통과할 때는 6개의 IMU 변수 각각의 신호가 급격하게 진동한다. 이러한 신호 범프는 주차수 영역이 아닌 시간 영역에서 명확하게 표현된다. 결과적으로 시간 영역에 따른 신호의 급격한 진동 정도를 감지하는 것 만으로도 큰 도움이 될 수 있다. 이때 노이즈를 제거하는 과정이 선행되어야 한다.
- Road Texture Description
이 기술은 '질감 평가(Texture Evaluation)' 와 '질감 분류(Texture Classification)' 두 단계로 수행된다.
'질감 평가' 의 목적은 특정 도로 구간의 전반적인 거칠기를 평가하는 것이다. 시간 영역에서 신호는 도로 범프, 도로 텍스쳐, 자동차 엔진 등과 같은 다양한 소스로 구성된다. 전체 도로 구간을 처리하는 경우 일부 큰 도로 범프에 의해 그 특성이 크게 영향을 받는다. 결과적으로 이 경우 주파수에 대한 분석이 더 유용하다.
따라서 원시 데이터 파일을 일정 길이를 가진 여러 개의 도로 세그먼트로 분할하고, 각 세그먼트에 대한 푸리에 분석을 수행했다.
4.2 Overall Workflow
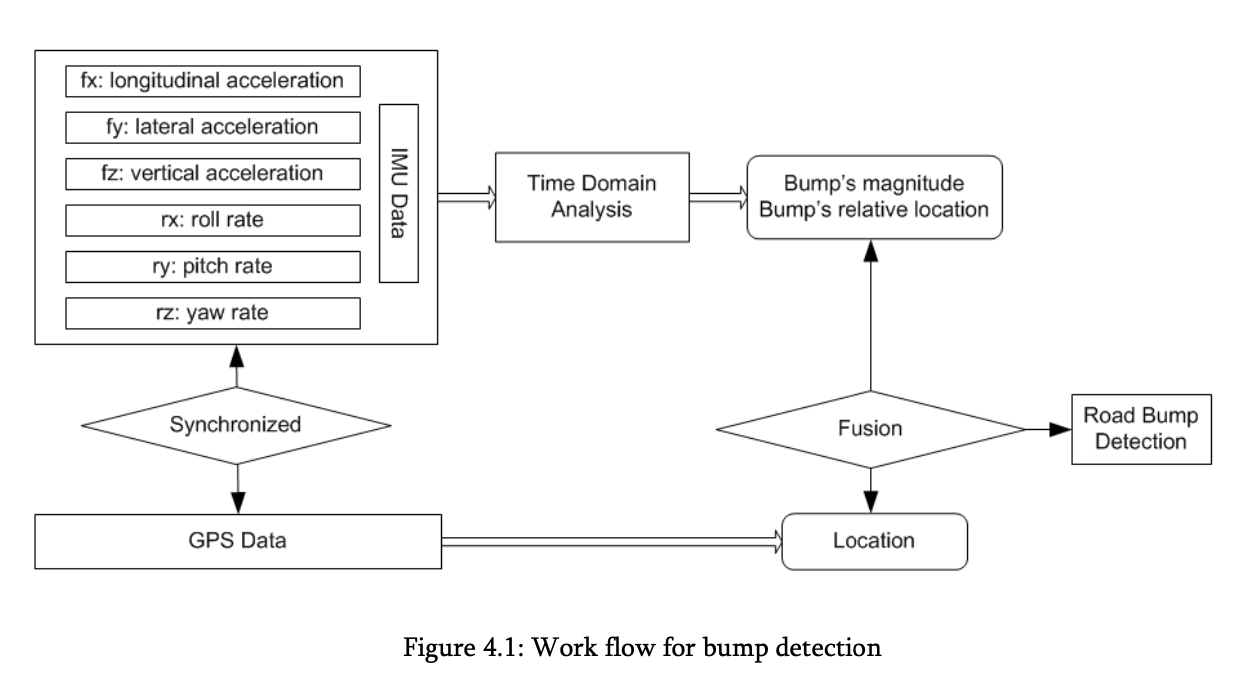
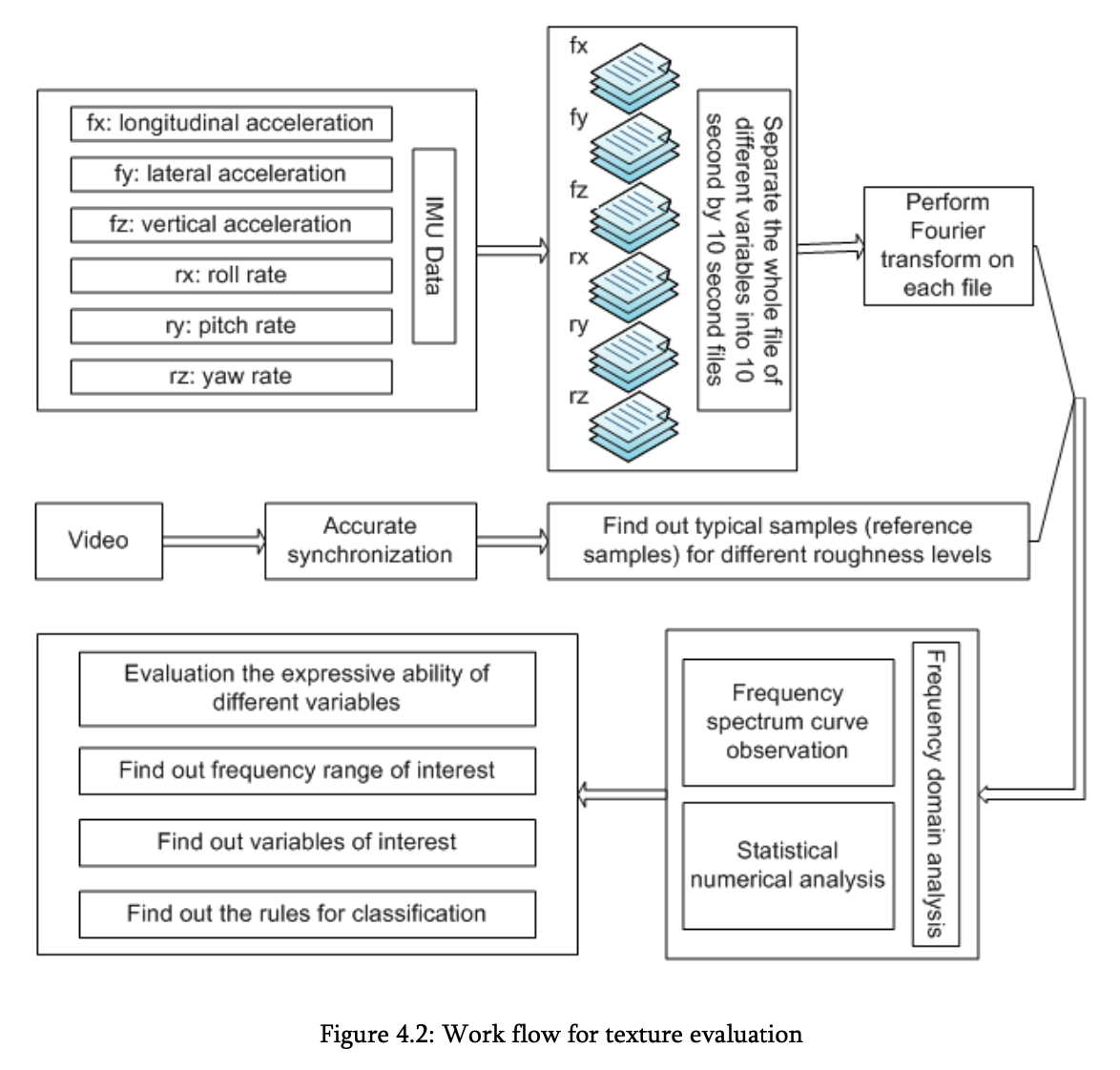
시간 영역 분석 (그림 4.1) 과 주파수 영역 분석 (그림 4.2)
주파수 영역 :
푸리에 분석은 10초 간격으로 수행된다. 전체적인 노면 질감을 가장 잘 보여주는 주파수 대역 (ROI) 를 찾아서 이 부분만 분석을 진행한다.
Texture Evaluation
6.1 Experimental Strategy
우리의 목표는 10초 길이의 전체 도로 구간의 거칠기를 평가하는 것이므로 신호에서 우선 개별 범프의 기여도를 차단해야 한다. 따라서 주파수 도메인에서의 분석을 시행했다.
거친 도로는 자동차를 많이 진동시키지만 매끄러운 도로는 자동차를 많이 진동시킬 수 없다. 따라서 주파수 축의 특정 범위를 알아내고 이 범위에 대한 수치 해석과 확률 연구를 기반으로 평가 규칙을 구축할 수 있다면 목표를 달성할 수 있을 것이다.
6.2 Procedure and Results
1) 데이터 준비
전체 데이터 파일을 10초 간격 파일로 분할한다. 데이터는 이름이 rx, ry, rz, fx, fy, fz 인 6개의 폴더로 나뉜다.
2) 원시 데이터에서 추세 (trend) 제거
IMU 신호는 차체의 움직임에 영향을 받는다. 따라서 원시 데이터에는 Fourier 변환에서 허용되지 않는 큰 (macro) 범위에의 일부 trend 가 포함된다.
따라서 푸리에 변환을 수행하기 전에 원시 데이터의 trend 를 제거해야 한다.
이 절차는 다항식 곡선을 사용해 원시 데이터를 피팅하고 이 곡선에 따라 원시 데이터를 수평선에 맞춤으로써 수행된다.
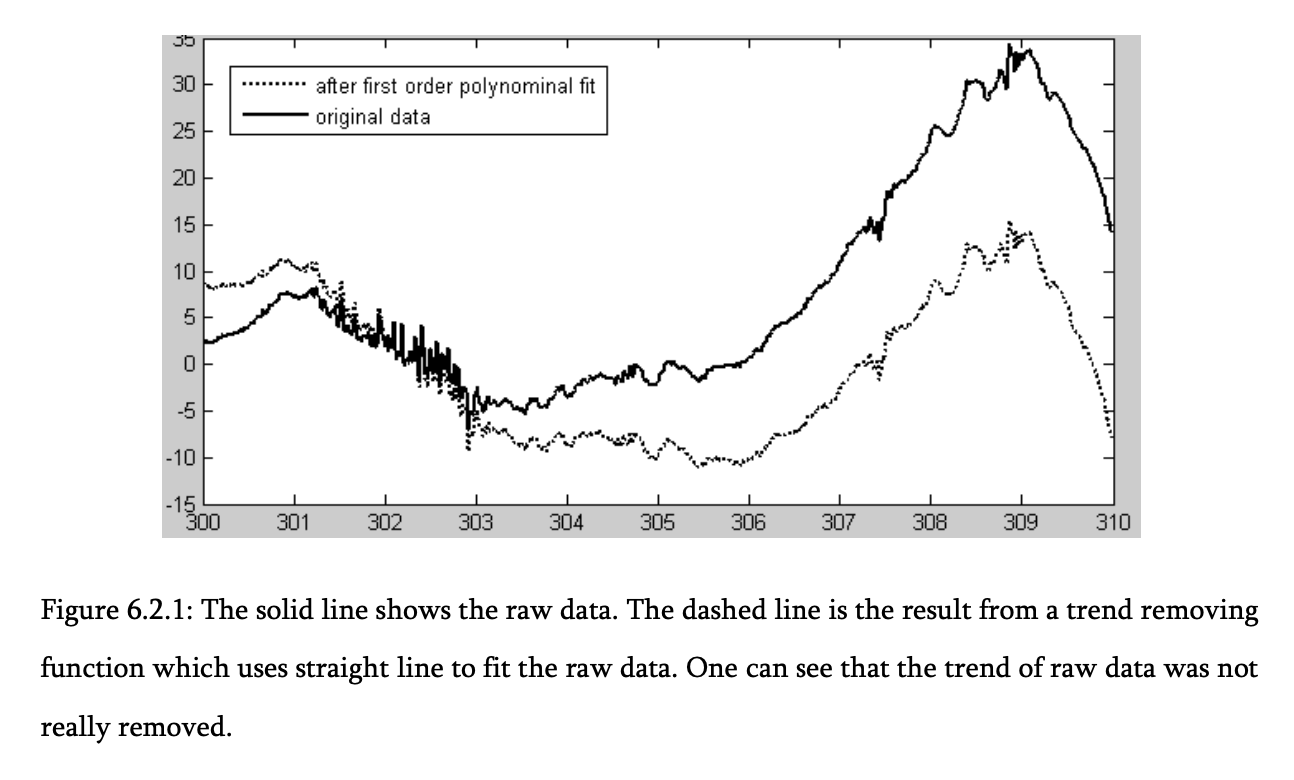
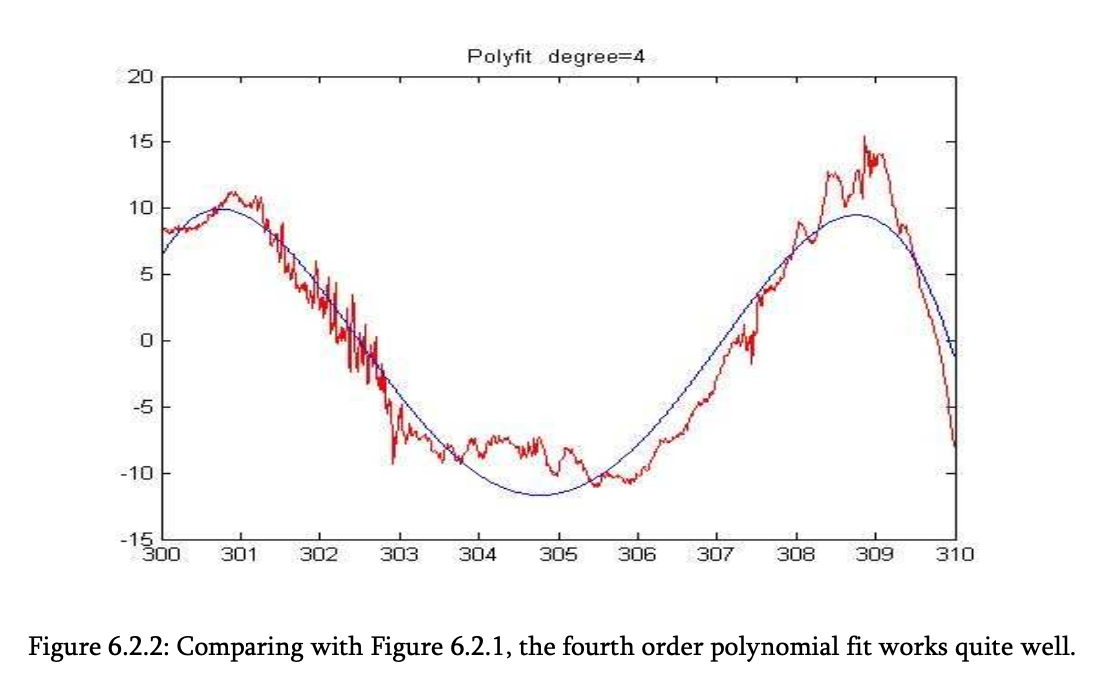
서로 다른 파일의 trend 는 다양하다. 대부분의 세그먼트에서 직선이면 trend 를 제거하기 충분하다. 그러나 운전 속도가 짧은 시간 내에 크게 변화는 일부 특수한 장소에서는 고차 다항식 피팅이 필요하다.
일부 세그먼트의 경우 고차 다항식 회귀는 일부 저주파 구성 요소를 제거한다. 그러나 이러한 저주파 구성 요소는 도로 질감과 관련되기에는 여전히 너무 낮기 때문에 쓸모가 없다. 실험 결과 우리는 4차 다항식 정합이 우리가 가진 모든 경우에 충분하다는 것을 발견했다.
3) 푸리에 변환
