Basic Equations of Control
Open-loop control system

Open-loop system의 출력은 다음과 같다.
Yol=GDolR+GW
출력과 Reference간의 오차는 다음과 같다.
Eol=R−Yol=R−[GDolR+GW]=[1−GDol]R−GW=[1−Tol]R−GW
Feedback control system with disturbance and noise
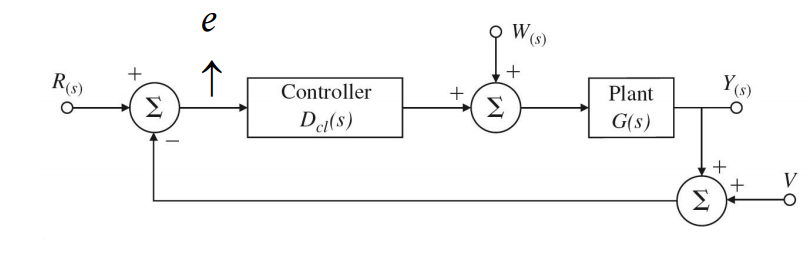
여기서 V는 sensor noise를 의미한다.
Feedback control의 출력은 다음과 같다.
Ycl=1+GDclGDclR+1+GDclGDclW−1+GDclGDclV
U=1+GDclDclR−1+GDclGDclW−1+GDclDclV
출력과 Reference간의 오차는 다음과 같다.
Ecl=1+GDcl1R−1+GDclGW+1+GDclGDclV
Stability
Open loop systems
open loop system에서 stable하려면은 plant와 controller의 pole이 모두 LHP에 있어야 한다.
그렇다면 unstable한 pole을 RHP의 zero로 없앨 수 있을까?
noise나 disturbance와 같이 unstable한 pole의 위치를 정확히 알지 못한다면, 그 근처에 zero가 있어 영향이 적다고 하더라도 시간이 지남에
따라 영향을 받을 정도로 값이 커지게 되어 결국 unstable해지게 된다.
Feedback systems
System의 pole은 1+GDcl=0이다.
이때, G(s)=a(s)b(s),Dcl(s)=d(s)c(s)이라면, system의 pole은 a(s)d(s)+b(s)c(s)=0가 되어 unstable한 pole이 존재하더라도 stable하게 만들 수 있다.
Tracking
Tracking problem은 output이 reference input을 가능한 가깝게 쫓아가는 것을 말한다.
Open-loop case
- plant가 stable한 상태에서 고려한다.
- controller가 proper(분모의 차수가 분자보다 높은 경우)해야한다.
- controller가 너무 빠르거나 큰 입력을 받으면 안된다.
- sensitivity problem(stable한 pole이 허수축에 가까운 경우)
Feedback을 사용하여 만들 수 있다.
Regulation
Regulation problem은 reference가 상수이고 disturbance의 영향을 없애면서 오차를 작게 유지하는 것이다.
Open-loop case : controller가 disturbance에 영향을 줄 수 없다.
Feedback case : disturbance와 noise간의 적절한 구간을 찾아 controller를 조절할 수 있다. 이때, disturbance는 low frequency에서 크고, noise는 high frequency에서 크다. 따라서, low frequency 영역에서는 disturbance를 줄이는 방향으로 가고 high frequency에서는 noise를 줄이는 방향으로 간다.
Sensitivity
plant gain이 G→G+δG로 바뀌었을 때
Open-loop : (Steady-state gain : Tol=GDol)
Tol+δTol=Dol(G+δG)=DolG+DolδG=Tol+DolδG
여기서 Normailized error 는 다음과 같다.
TolδTol=DolGDolδG=GδG
Sensitivity는 G가 1%바뀔 때 Tol이 몇 %바뀌는 지를 의미한다.
→fractionalchangeinGfractionalchangeinTol→SGT=GδGTolδTol
따라서 open loop system에서는 plant의 전달함수가 1% 바뀌면 전체 전달함수도 1% 바뀐다.
Feedback case :
- steady-state gain : Tcl+δTcl=1+(G+δG)Dcl(G+δG)Dcl,Tcl=1+GDclGDcl
- 1st-order variation : δTcl=dGdTclδG
TclδTcl=Tcl1dGdTclδG=(TclGdGdTcl)GδG=(sensitivity)GδG
따라서, Plant의 전달함수에 따른 Tcl의 sensitivity는 다음과 같다.
SGTcl:=TclGdGdTcl
SGTcl=GDcl/(1+GDcl)G(1+GDcl)2(1+GDcl)Dcl−Dcl(GDcl)=1+GDcl1
Dcl(orGDcl)이 적당히 크다면은 plant의 sensitivity는 변하지 않는다.
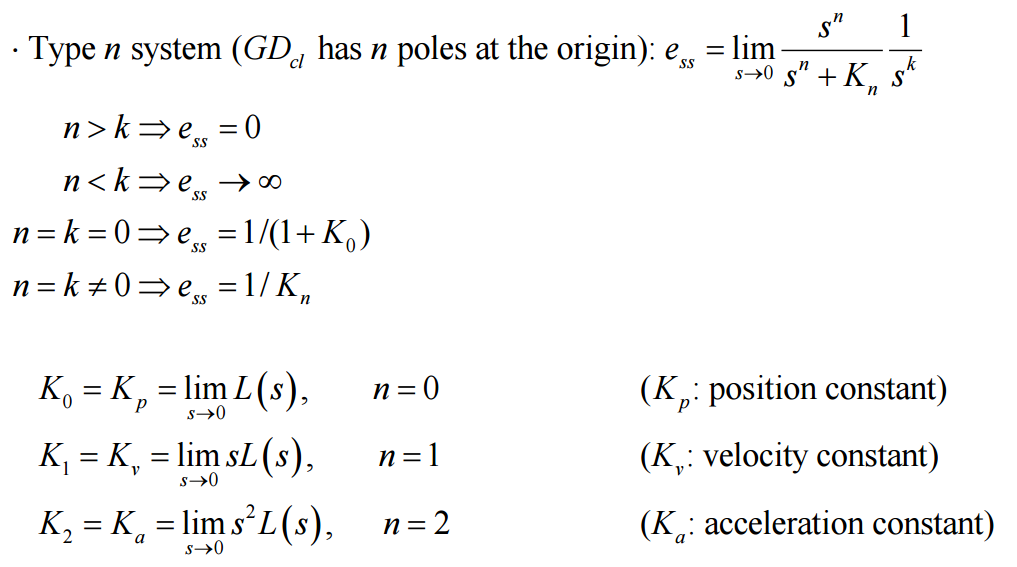
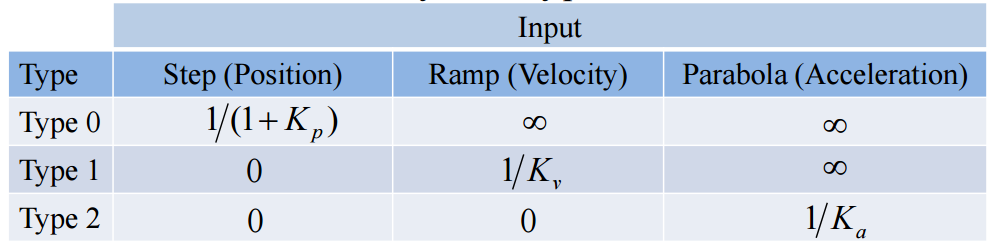
Control of Steady-State Error : System Type
Steady-state system error가 0 이 아닌 유한한 상수일 때 polynomial reference input의 Degree를 System Type이라 부른다.
System Type for Reference Tracking
t→∞lime(t)=ess=s→0limsE(s)=s→0lim1+GDcl1sk1
- Type 0 system (GDcl의pole이원점에없을때) : G(0)Dcl(0)=Kp,R(s)=1/s
→ess=lims→0s1+GDcl1s1=1+GDcl(0)1
- Type n system (GDcl의pole이원점에n개있을때) : GDcl(s)=snGDclo(s),GDclo(0)=Kn
ess=lims→0s1+snGDclo(s)1sk1=lims→0sn+Knsnsk1
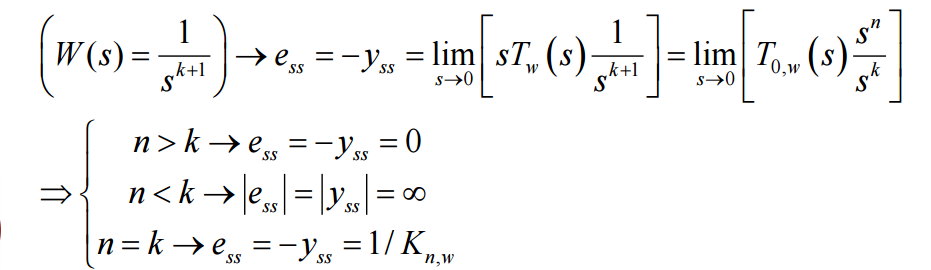
System Type : Regulation and Disturbance Rejection
Disturbance또한 Reference때와 비슷하게 w(t)=k!tk의 형식으로 나타냈을 때로 가정한다. 이때, Reference와 noise는 0이다.
Disturbance Rejection에서는 Reference때와는 다르게 Controller의 pole이 원점에 몇개 있는지로 확인한다.
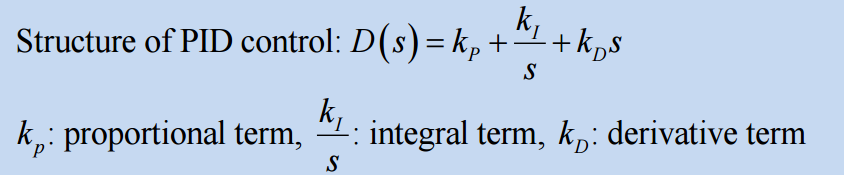
The Three-Trem Controller : PID Control
Proportional Control (P)
u=kpe,E(s)U(s)=Dcl(s)=kp
이때, plant는 2nd order form G(s)=s2+a1s+a2A이라고 하자.
Closed-loop characteristic equation :
1+kpG(s)=0s2+a1s+a2+kpA=0
이를 통해 2nd order form에서 상수항을 변화 시킬 수 있다는 것을 알 수 있다. 이는 natural frequency를 바꿀수 있으며, 이를 통해 감쇠비 또한 조절 할 수 있다. natural frequency가 커지면 감쇠비는 작아진다. 따라서 크게 진동하게 된다.
Proportional plus Integral Control (PI)
u(t)=kpe(t)+kI∫tte(τ)dτE(s)U(s)=Dcl=kp+skI
Integral term은 Type 1이다.
ex)
Plant가 1st order form에서
Y=τs+1A(U+W)PIcontrol:U=kp(R−Y)+kIsR−Y(τs+1)Y=A(kp+skI)(R−Y)+AW(τs2+(Akp+1)s+AkI)Y=A(kps+kI)R+sAW
Characteristic equation :
τs2+(Akp+1)s+AkI=0
따라서, 내가 원하는 natural frequency와 감쇠비가 있다면 그것에 맞게 고칠 수 있다.
Plant가 2nd order form에서
Characteristic equation :
1+skps+kIs2+a1s+a2A=0s3+a1s2+a2s+Akps+AkI=s3+a1s2+(a2+Akp)s+AkI=0
여기서도 2개의 계수만 바꿀 수 있다.
Proportional-Integral-Derivative Control (PID)
u(t)=kpe(t)+kI∫te(τ)dτ+kDdtde(t)
transfer function : Dcl(s)=E(s)U(s)=kp+skI+kDs=skps+kI+kDs2
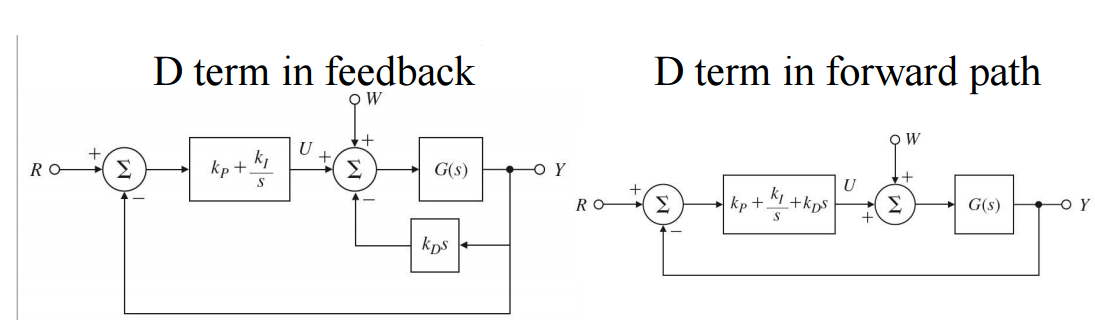
왼쪽 그림은 reference가 미분되기를 원치 않을 때 사용하면 된다.
Plant가 2nd order form일 때
Characteristic equation :
1+(kp+skI+kDs)s2+a1s+a2A=0s3+a1s2+a2s+A(kps+kI+kDs2)=0→s3+(a1+AkD)s2+(a2+Akp)s+AkI=0
2nd order plant에서는 모든 계수를 바꿀수 있어 원하는 pole로 이동이 가능하다.
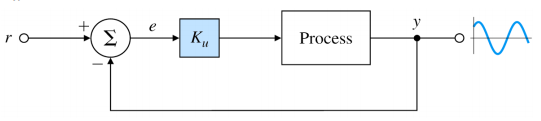
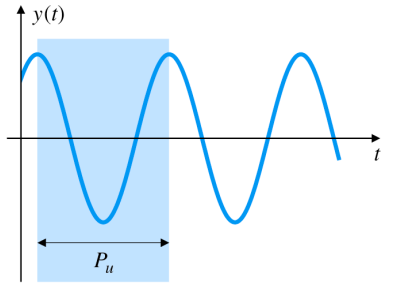
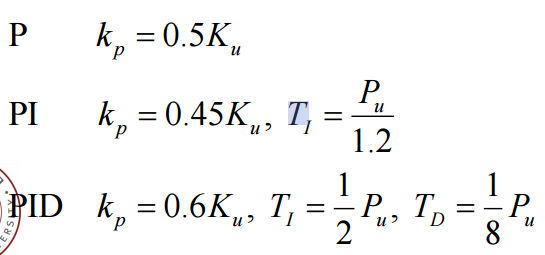
Ziegler-Nichols Tuning of the PID Controller
대부분의 경우 시스템의 모델을 알지 못한다. 이때, PID Control을 편히 사용하기 위해서 Ziegler-Nichols 방법을 사용해서 Gain을 튜닝한다.

시스템이 1st-order system with time delay td (U(s)Y(s)=τs+1Ae−std)이라 가정 한다.
R=A/τ,L=td
PID control : Dc(s)=kp[1+TIs1+TDs]