1. 3차원 시각화 도구 (RViz)
RViz (ROS Visualization Tool)
-
ROS의 3D 시각화툴
- 센서 데이터의 시각화
- 레이저 거리 센서(LDS)의 거리 데이터
- RealSense, Kinect, Xtion 등의 Depth Camera의 포인트 클라우드 데이터
- 카메라의 영상 데이터
- IMU 센서의 관성 데이터 등...
-
로봇 외형의 표시와 계획된 동작을 표현
- URDF (Unified Robot Description Format)
-
내비게이션
-
매니퓰레이션
-
원격 제어
RViz 사용 예
-
Kinect의 Point Cloud Data
https://youtu.be/OqOkpZBOpxY
거리 값을 Point Cloud Data로 표시 -
레이저 거리 센서의 거리 값
https://youtu.be/qtoAJIwzB6s
rgb로 depth 표시 -
IMU 센서의 관성 값
https://youtu.be/j5v5tKppcQo
드론에 많이 장착 -
RealSense의 Point Cloud와 Color, Depth 영상
https://youtu.be/Jf4kgPEzY4s -
사람의 골격과 지시 방향 표시
https://youtu.be/ath8uNv9c_Q
가리키는 곳으로 로봇 이동 명령 -
R2-D2 로봇 모델
$ sudo apt-get install ros-kinetic-urdf-tutorial
$ roslaunch urdf_tutorial display.launch ??? -
환경 모델, 로봇 모델, 경로까지
https://youtu.be/9lbuLADlc_4 -
지도 표시, 내비게이션, 목적지 지정
https://youtu.be/VYlMywwYALU -
인터렉티브 마커를 이용한 IK 목표 위치 지정 및 경로 표시
-
재난구조로봇의 경우 (2015 DARPA Robotics Challenge)
https://www.youtube.com/user/DAPRAtv
RViz 설치 및 실행
1) RViz 설치
RViz 설치는 아래의 명령어를 입력하면 된다.
ros-kinetic-desktop-full을 설치했었으면 RViz가 기본 설치되어있기 때문에 필요 없다.
$ sudo apt install ros-kinetic-rviz
2) RViz 실행
$ rosrun rviz rviz 또는 $ rviz
RViz 화면 구성 (LDS의 경우)

RViz 디스플레이 종류
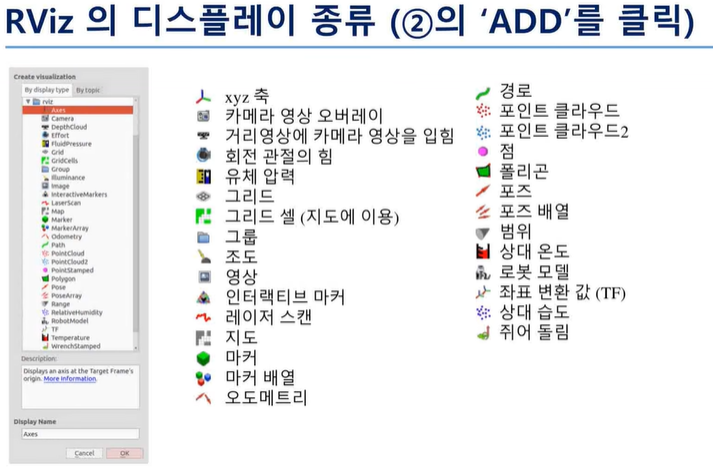
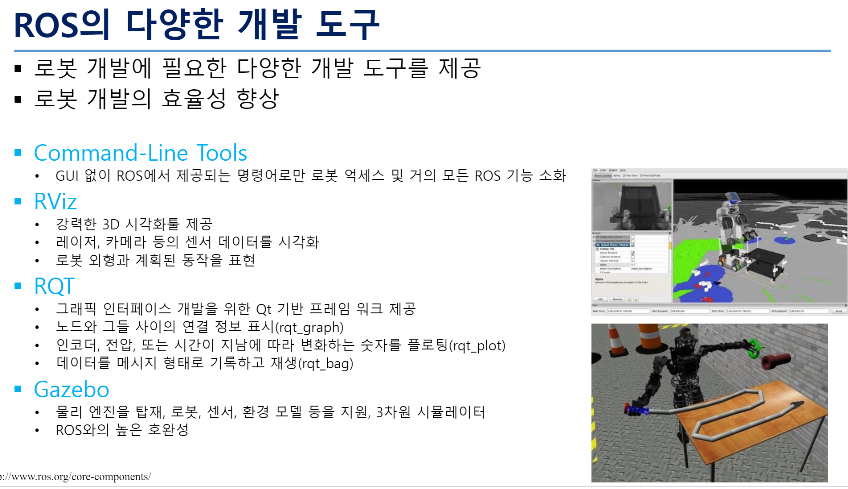
RViz를 이용하면 센서 및 로봇 관련 "데이터 시각화"가 매우 간단!
2. ROS GUI 개발 도구 (RQT)
RQT: 플러그인 방식의 ROS의 종합 GUI 툴
-
ROS Fuerte 버전부터는 rqt라는 이름으로 기존의 rxbag, rxplot, rxgraph 등이 통폐합되어 rqt_bag, rqt_plot, rqt_graph 등을 플러그인으로 하는
ROS의 통합 GUI 툴로써 사용 가능해졌다. -
rqt는 QT로 개발되어 있기 때문에 유저들이 자유롭게
플러그인을 개발하여 추가 가능 -
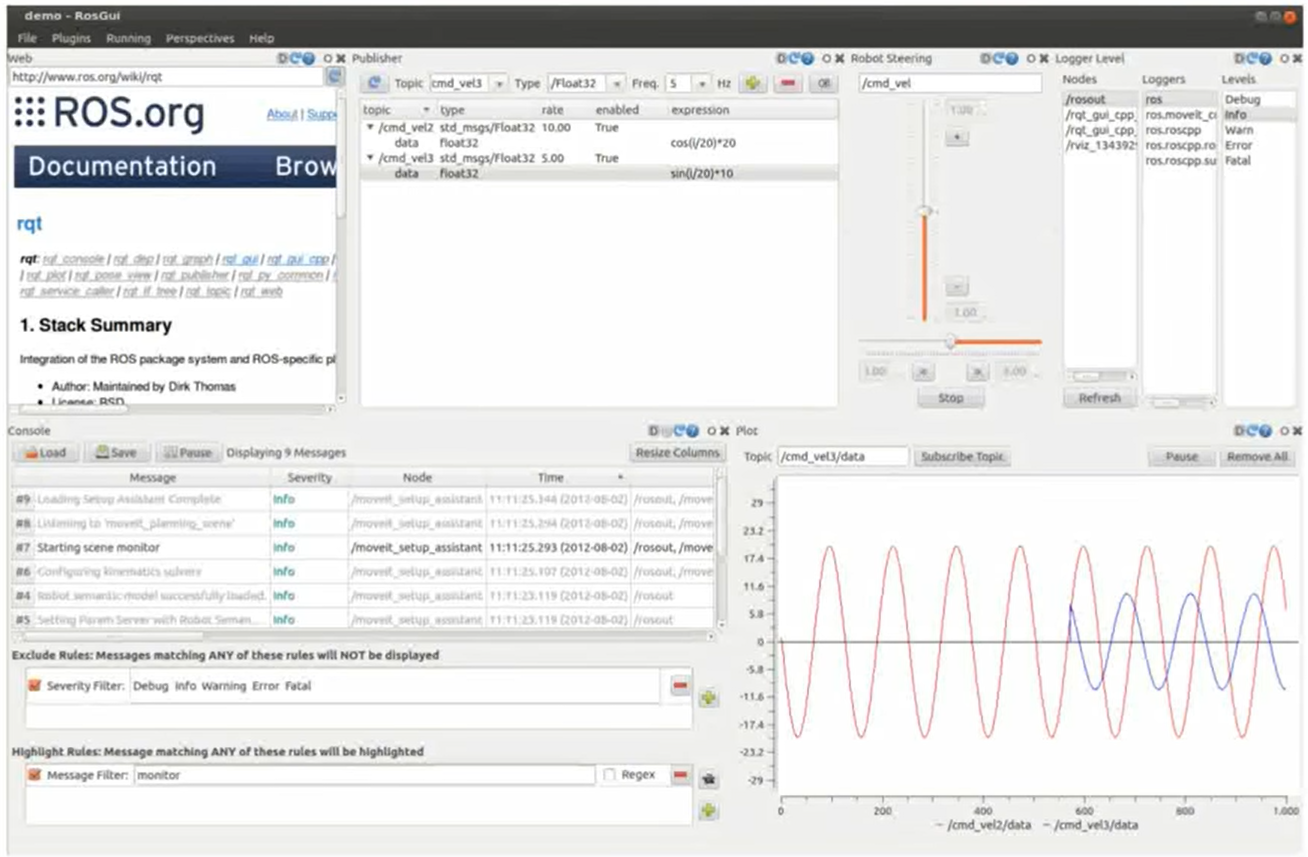
rqt의 대표적인 플러그인
rqt_image_viewrqt_graphrqt_plotrqt_bag
RQT 설치 및 실행
1) RQT 설치
$ sudo apt install ros-kinetic-rqt ros-kinetic-rqt-common-plugins
이것도 마찬가지로 ros-kinetic-desktop-full을 설치했었으면 이미 깔려있음
2) RQT 실행
$ rqt
RQT 플러그인
-
액션 (Action)
Action Type Browser: Action 타입의 데이터 구조를 확인
-
구성 (Configuration)
Dynamic Reconfigure: 노드들에서 제공하는 설정값 변경을 위한 GUI 설정값 변경Launch: roslaunch의 GUI 버전
-
내성 (Introspection)
Node Graph: 구동중인 노드들의 관계도 및 메시지의 흐름을 확인 가능한 그래프 뷰Package Graph: 노드의 의존 관계를 표시하는 그래프 뷰Process Monitor: 실행중인 노드들의 CPU 사용률, 메모리 사용률, 스레드 수 등을 확인
-
로깅 (Logging)
Bag: ROS 데이터 로깅Console: 노드들에서 발생되는 경고(Warning), 에러(Error) 등의 메시지를 확인Logger Level: ROS의 Debug, Info, Warn, Error, Fatal 로거 정보를 선택하여 표시
-
다양한 툴 (Miscellaneous Tools)
Python Console: 파이썬 콘솔 화면Shell: 쉘(Shell)을 구동Web: 웹 브라우저를 구동
-
로봇 (Robot)
- 사용하는 로봇에 따라 계기판(dashboard) 등의 플러그인을 이곳에 추가
-
로봇 툴 (Robot Tools)
Controller Manager: 컨트롤러 제어에 필요한 플로그인Diagnostic Viewer: 로봇 디바이스 및 에러 확인Moveit! Monitor: 로봇 팔 계획에 사용되는 Moveit! 데이터를 확인Robot Steering: 로봇 조정 GUI 툴, 원격 조정에서 이 GUI 툴을 이용하여 로봇 조종Runtime Monitor: 실시간으로 노드들에서 발생되는 에러 및 경고를 확인
-
서비스 (Services)
Service Caller: 구동중인 서비스 서버에 접속하여 서비스를 요청Service Type Browser: 서비스 타입의 데이터 구조를 확인
-
토픽 (Topics)
Eash Message Publisher: 토픽을 GUI 환경에서 발행Topic Publisher: 토픽을 생성하여 발행Topic Type Browser: 토픽 타입의 데이터 구조 확인Topic Monitor: 사용자가 선택한 토픽의 정보를 확인
-
시각화 (Visualization)
Image View: 카메라의 영상 데이터를 확인Navigation Viewer: 로봇 네비게이션의 위치 및 목표지점 확인Plot: 2차원 데이터 플롯 GUI 플러그인, 2차원 데이터의 도식화Pose View: 현재 TF의 위치 및 모델의 위치 표시RViz: 3차원 시각화 툴인 RViz 플러그인TF Tree: tf 관계를 트리로 나타내는 그래프 뷰
RQT의 사용 예시
RQT 실습
실습 명령어는 다 각각 다른 터미널에 입력
1) rqt_image_view
$ rosrun uvc_camera uvc_camera_node
$ rqt (메뉴에서 [Plugins] -> [Visualization] -> [Image View] 선택)
또는 $ rqt_image_view
2) rqt_graph
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
$ rosrun uvc_camera uvc_camera_node
$ rosrun image_view image_view image:=image_raw
$ rqt (메뉴에서 [Plugins] -> [Introspection] -> [Node_Graph] 선택)
또는 $ rqt_graph
3) rqt_plot
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
$ rqt (메뉴에서 [Plugins] -> [
Visualization] -> [Plot] 선택)
또는 $ rqt_plot /turtle1/pose/
4) rqt_bag
$ rosrun uvc_camera uvc_camera_node
$ rosbag record /image_raw
$ rqt (메뉴에서 [Plugins] -> [Logging] -> [Bag] 선택)
또는 $ rqt_bag
RQT를 이용하면
1. GUI 형태로 ROS 이용 가능
2. GUI Tool 제작이 간단!
3. 3D Simulator: Gazebo
Gazebo
-
로봇 개발에 필요한 3차원 시뮬레이션을 위한 로봇, 센서, 환경 모델 등을 지원하고
물리 엔진을 탑재하여 실제와 근사한 결과를 얻을 수 있는3차원 시뮬레이터 -
최근에 나온 오픈 진영 시뮬레이터 중 가장 좋은 평가를 받고 있고, 미국
DARPA Robotics Challenge의 공식 시뮬레이터로 선정되어 개발에 더욱 박차를 가하고 있음 -
ROS에서는 그 태생이 Player/Stage, Gazebo를 기본 시뮬레이터로 사용하고 있어서
ROS와의 호완성도 매우 좋음
"시뮬레이션"이 필요하다면 ROS와 연동하기 쉬운 Gazebo 사용!
참고)
강의: https://www.youtube.com/watch?v=fB2YINZOIng&list=PLRG6WP3c31_VIFtFAxSke2NG_DumVZPgw&index=6&ab_channel=ROBOTISOpenSourceTeam
자료: https://github.com/robotpilot/ros-seminar/blob/master/06_ROS_%EB%8F%84%EA%B5%AC.pdf
