1. ROS 프로그래밍 전에 알아둬야 할 사항
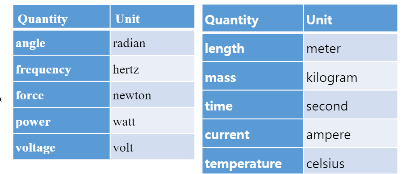
- 표준 단위
- SI 단위 사용
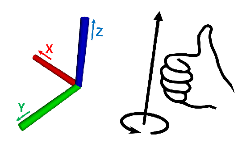
- 좌표 표현 방식
- x: forward, y: left, z: up
- 오른손 법칙(반시계 방향이
+)
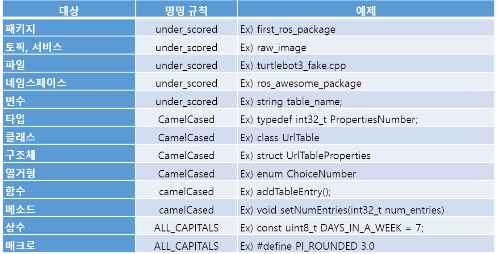
- 프로그래밍 규칙
2. 메시지 통신의 종류
ROS 메시지 통신
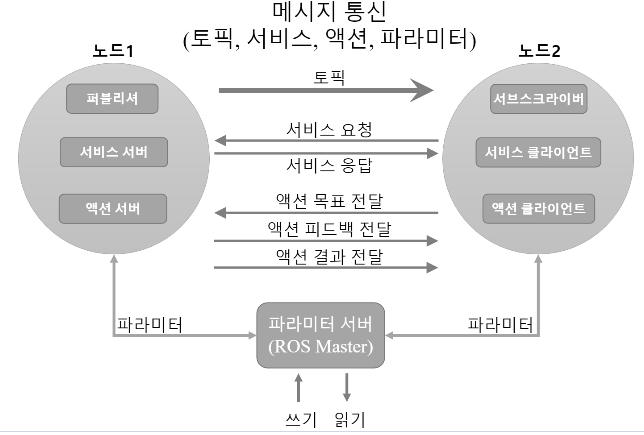
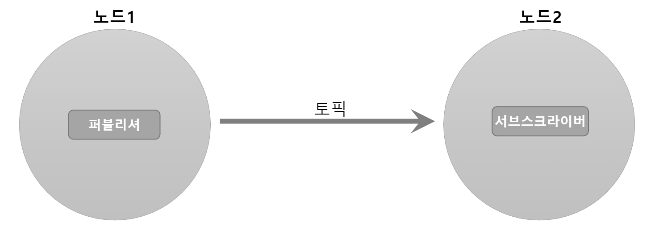
2-1. 토픽(Topic)
- 단방향 통신일 때 Topic이라는 메시지 통신 사용
- 송신 측을
Publisher, 수신 측을Subscriber라고 부름
📌Publisher & Subscriber 노드 작성 및 실행
1) 패키지 생성
2-2. 서비스(Service)
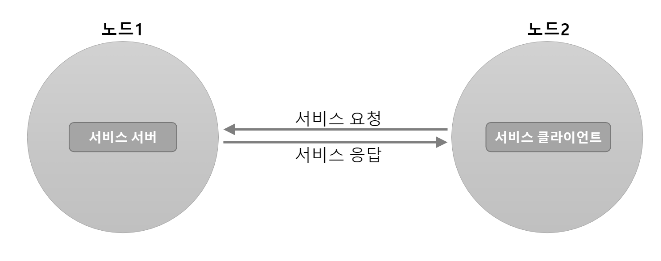
📌Service server & Service client 노드 작성 및 실행
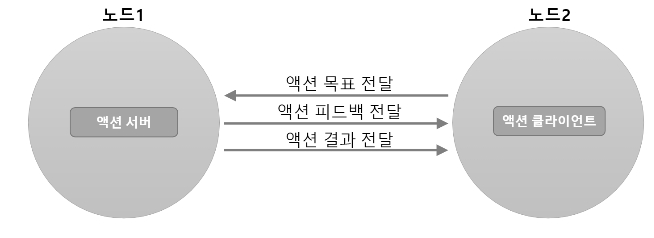
2-3. 액션(Action)
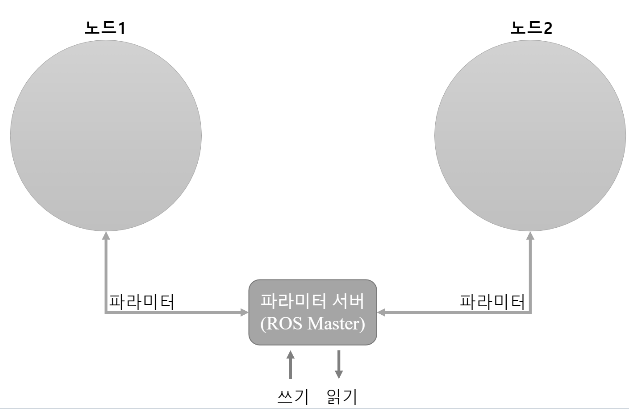
2-4. 매개변수(Parameter)
📌Paramerter 사용법
3. roslaunch 사용법
참고)
강의: https://www.youtube.com/watch?v=iGdQHi_wL1Y&list=PLRG6WP3c31_VIFtFAxSke2NG_DumVZPgw&index=7&ab_channel=ROBOTISOpenSourceTeam
자료: https://github.com/robotpilot/ros-seminar/blob/master/07_ROS_%EA%B8%B0%EB%B3%B8_%ED%94%84%EB%A1%9C%EA%B7%B8%EB%9E%98%EB%B0%8D.pdf
