1. 로봇 패키지
아래의 사이트에 들어가서 확인하면 된다.
http://robots.ros.org/
2. 센서 패키지
아래의 사이트에 들어가서 확인하면 된다.
http://wiki.ros.org/Sensors
센서 패키지의 종류
-
1D Range Finders- 저가의 로봇을 만들 때 사용할만한 적외선 방식의 직선거리 센서
-
2D Range Finders- 2차 평면상의 거리를 계측할 수 있는 센서로 주로 내비게이션에 많이 사용되는 센서
-
3D Sensors- Intel 사의 RealSense, Microsoft 사의 Kinect, ASUS 사의 Xtion과 같은 3차원 거리 측정에 사용되는 센서
-
Audio/Speech Recognition- 현재 음성인식 관련 부분은 매우 적지만, 지속해서 추가될 것으로 보임
-
Cameras- 물체인식, 얼굴인식, 문자판독 등에 많이 사용되는 카메라의 드라이버 및 각종 응용 패키지
-
Sensor Interfaces- USB 및 웹 프로토콜을 지원하는 센서는 매우 적음
- 아직까지도 많은 센서들은 마이크로프로 센서에서 정보를 쉽게 얻을 수 있는 센서가 많음
- 이러한 센서는 마이크로프로세서의 URAT 및 미니 PC 계열에서 ROS와의 연결을 지원함
3. 센서 패키지 실습
1) USB Camera
아래의 명령어를 통해 관련 패키지를 다운받는다.
$ sudo apt-get install ros-kinetic-uvc-camera
아래의 명령어를 통해 관련 노드를 실행시킨다.
i) 카메라가 한 대인 경우
$ rosrun uvc_camera uvc_camera_node
ii) 카메라가 두 대 이상인 경우
$ rosrun uvc_camera uvc_camera_node_device:=/dev/video?
이때 ?에 사용하기 원하는 디바이스 번호를 입력한다.(특히, 노트북의 경우)
아래의 세 가지 명령어 중 하나를 선택해서 이미지 메시지를 확인한다.
$ rosrun image_view image_view image:=/image_raw
$ rqt_image_view image:=/image_raw
$ rviz
참고) RViz의 Displays 옵션 변경
-
Fixed Frame 변경
- Global Options >
Fixed Frame = camera
- Global Options >
-
이미지 디스플레이 추가
- rviz 좌측 하단의 Add 클릭한 후,
Image선택하여 추가
- rviz 좌측 하단의 Add 클릭한 후,
-
토픽 값 변경
- Image > Image Topic의 값을 "
/image_raw"로 변경
- Image > Image Topic의 값을 "
2) 원격으로 이미지 전송
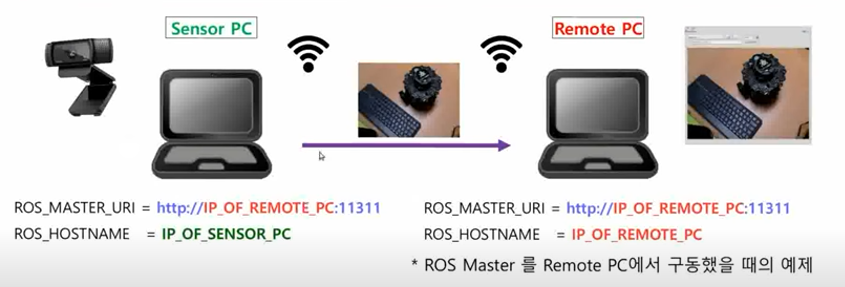
- 각 PC의 ~/.bashrc 파일 수정(ROS_MASTER_URI 및 ROS_HOSTNAME)
- Remote PC에서
roscore및rqt_image_view image:=/iamge_raw실행 - Sensor PC에서
rosrun uvc_camera uvc_camera_node실행
3) 카메라 캘리브레이션
$ sudo apt-get install ros-kinetic-camera-calibration
$ rosrun uvc_camera uvc_camera_node
$ rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/image_raw camera:=/camera
4) Depth Camera
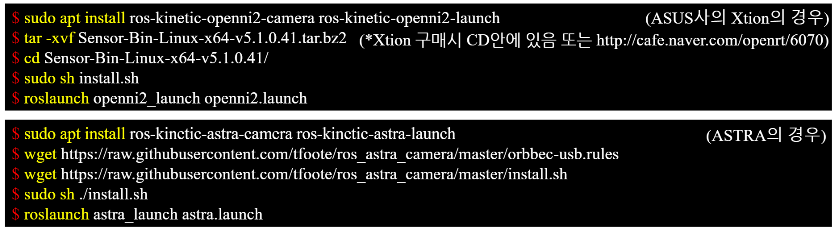
아래는 RealSense의 경우

RealSense D400 시리즈의 경우는 아래의 사이트 참조
http://wiki.ros.org/libcalsense2
http://wiki.ros.org/realsense2_camera
참고) RViz의 Displays 옵션 변경
-
Fixed Frame 변경
- Global Options >
Fixed Frame = camera_depth_frame으로 변경
- Global Options >
-
PointCloud2 추가 및 설정
- rviz 좌측 하단의 Add 클릭한 후,
PointCloud2선택하여 추가
- rviz 좌측 하단의 Add 클릭한 후,
-
Topic 이름 및 세부 설정 변경
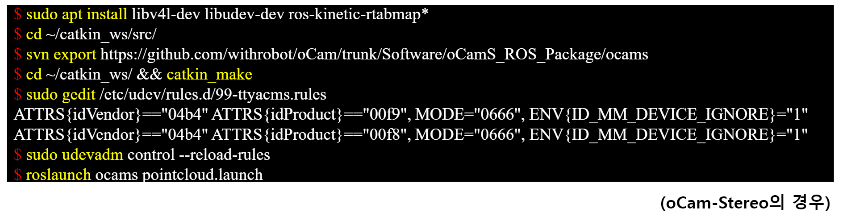
5) Stereo Camera
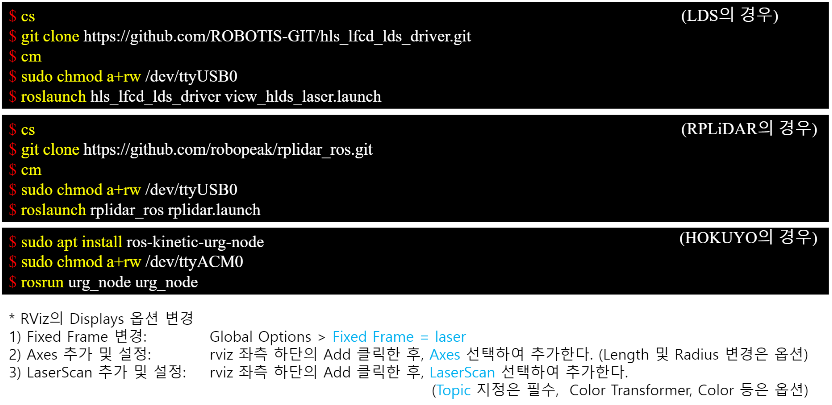
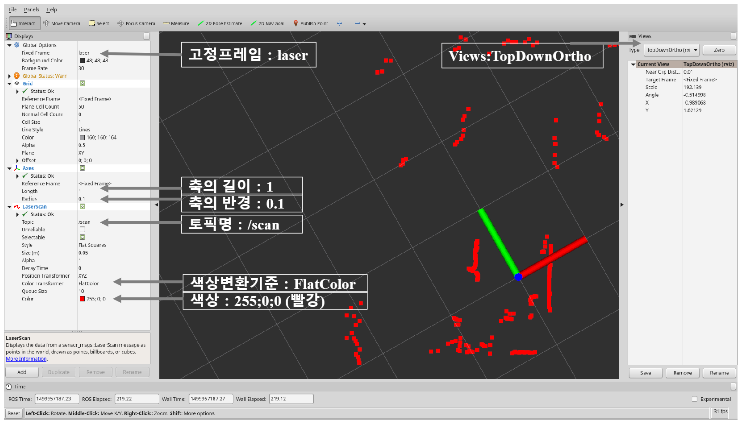
6) LDS
7) IMU

4. 모터 패키지
http://wiki.ros.org/Motor%20Controller%20Drivers
- PhidgetMotorControl HC
- Roboteq AX2550 Motor Controller
- ROBOTIS Dynamixel
ROS 패키지를 이용하여 다이나믹셀 제어하기
-
DynamixelSDK(http://wiki.ros.org/dynamixel_sdk)- 3대 OS 지원 (Linux, Windows, MacOS)
- C, C++, C#, Python, Java, MATLAB, LabVIEW 등의 프로그래밍 언어 지원
- ROS 지원
-
dynamixel_workbench(http://wiki.ros.org/dynamixel_workbench)- ROS에서 사용하기 쉽도록 다양한 예제 제공
- ROS 대응 GUI 툴 제공
참고)
강의: https://www.youtube.com/watch?v=IIlvF9c8Wzw&list=PLRG6WP3c31_VIFtFAxSke2NG_DumVZPgw&index=8&ab_channel=ROBOTISOpenSourceTeam
자료: https://github.com/robotpilot/ros-seminar/blob/master/08_%EB%A1%9C%EB%B4%87_%EC%84%BC%EC%84%9C_%EB%AA%A8%ED%84%B0.pdf
