1. rosserial
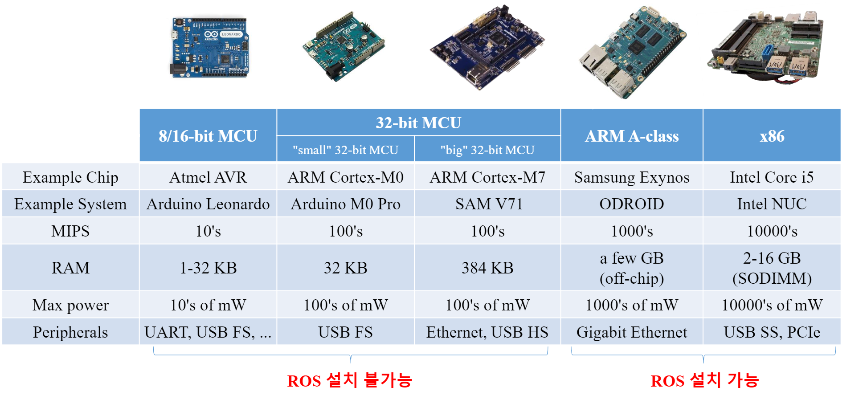
컴퓨터 자원의 종류와 ROS 지원
-
x86은 컴퓨터/노트북,ARM A-class는 스마트폰에 사용됨 -
MCU계열은 로봇 제어 관련
ROS에서 임베디드 시스템
-
PC와는 달리 임베디드 시스템에서는 ROS 설치가 불가능
-
실시간성 확보 및 하드웨어 제어를 위해서는 ROS가 설치된 PC와 임베디드 시스템 간의 연결이 요구됨
-
ROS에서는 이를 위해
rosserial이라는 패키지를 제공
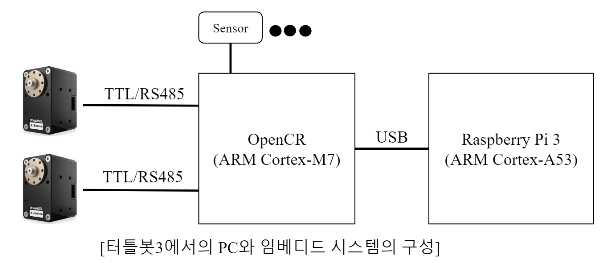
OpenCR과 Rasberry Pi 3를 USB 혹은 시리얼 연결.
이 둘 사이에 데이터를 주고받는데, Rasberry Pi 3에서는 ROS 메시지를 사용! 하지만 OpenCR에서는 바로 사용 불가능 ➡️ 이 변환을 담당하는 게 rosserial
rosserial
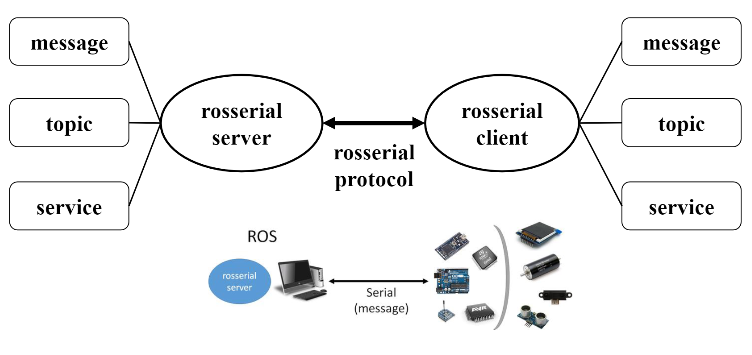
- PC와 제어기 간의 메시지 통신을 위해 중계자 역할을 수행하는 ROS 패키지
- 예) 제어기 ➡ 시리얼(rosserial 프로토콜) ➡ PC(ROS 메시지로 재전송)
- 예) 제어기 ⬅ 시리얼(rosserial 프로토콜) ⬅ PC(ROS 메시지를 시리얼로 변경)
rosserial server와 client
$ sudo apt install ros-kinetic-rosserial ros-kinetic-rosserial-server ros-kinetic-rosserial-arduino
-
rosserial serverrosserial_python: Python 언어 기반의 rosserial server, 매우 많이 사용됨rosserial_server: C++ 언어 기반의 rosserial server, 일부 기능 제약 있음rosserial_java: Java 언어 기반의 rosserial server, 안드로이드 SDK와 함께 사용
-
rosserial client:rosserial_arduino: Arduino와 Leonardo 지원, OpenCR은 수정하여 사용 중rosserial_embeddedlinux: 임베디드용 리눅스용 라이브러리rosserial_windows: 윈도우 운영체제 지원, 윈도우의 응용프로그램과 통신 지원rosserial_mbed: ARM사의 mbed 지원rosserial_tivac: TI사의 Launchpad 지원
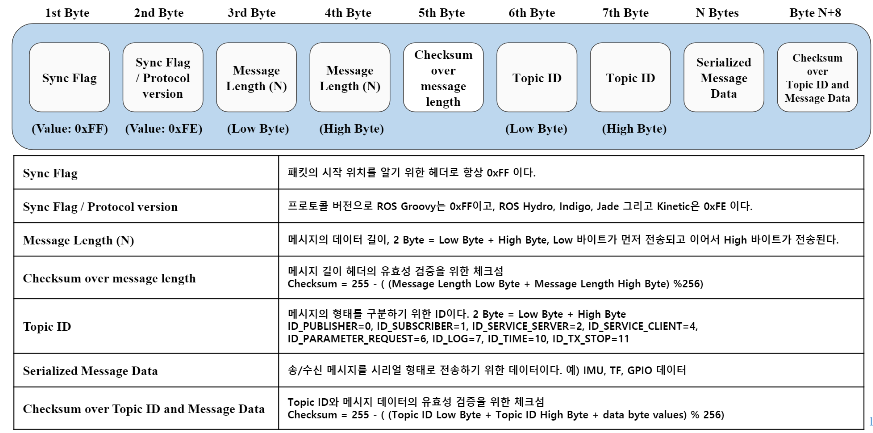
⭐rosserial 프로토콜
http://wiki.ros.org/rosserial/Overview/Protocol
rosserial 제약사항
-
메모리
- Publisher, Subscriber 개수 및 송신, 수신 버퍼의 크기를 미리 정의해야 함
-
Float64
- 마이크로컨트롤러는 64비트 실수연산을 지원하지 않아 32비트형으로 변경함
-
Strings
- 문자열 데이터를 String 메시지 안에 저장하지 않고 외부에서 정의한 문자열 데이터의 포인터 값만 메시지에 저장함
-
Arrays
- 메모리 제약사항으로 배열의 크기를 지정해서 사용
-
통신 속도
- UART 같은 경우 115200bps와 같은 속도로는 메시지의 개수가 많아지면 응답 및 처리 속도가 느려짐
2. OpenCR; Open-source Control module for ROS
-
ROS를 지원하는 임베디드 보드 -
터틀봇3에서 메인 제어기로 사용됨 -
오픈소스 H/W, S/W: 회로, BOM, 거버 데이터 등의 H/W 정보 및 OpenCR의 모든 S/W를 오픈소스로 공개 -
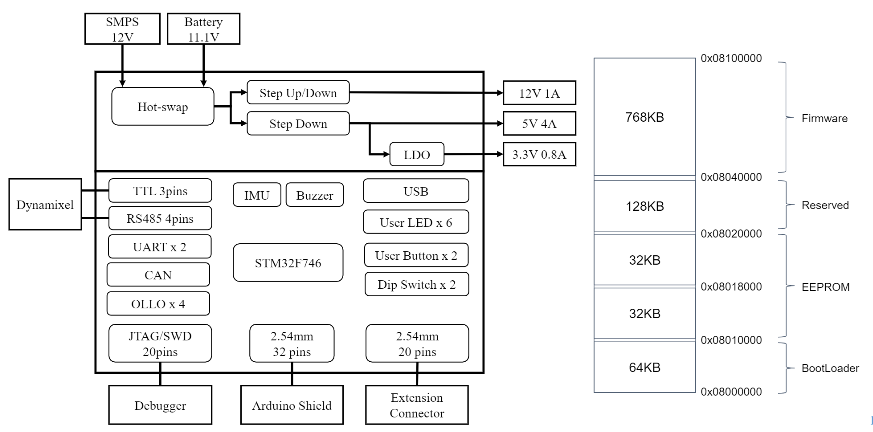
rosserial의 제약 사항을 극복하기 위한 구성- 32-bit ARM Cortex-M7 with FPU (216MHz, 462DMIPS)
- 1MB 플래시 메모리
- 320KB SRAM
- Float64 지원
- UART가 아닌 USB 패킷 전송 사용
-
SBC 계열의 컴퓨터와 다양한 센서와 함께 사용하기 위한
전원 설계- 12V@1A, 5V@4A, 3.3V@800mA
-
확장 포트- 32 pins(L 14, R 18) - Arduino connectivity
- OLLO Sensor module x 4 pins
- Extension connector x 18 pins
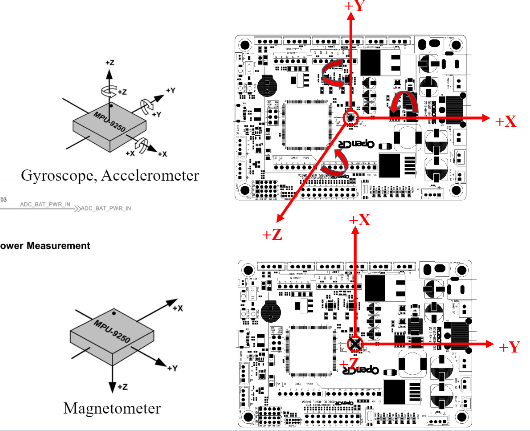
기본 장착 센서 및 통신 지원
- 기본 장착 센서
- Gyroscope 3Axis
- Accelerometer 3Axis
- Magnetometer 3Axis
- 전압 측정 회로
- 통신 지원
- USB, SPI, I2C
- TTL, RS485, CAN
블록 다이어그램 및 플래시 메모리 맵
개발환경 구축
- OpenCR은 Arduino IDE 지원
- OpenCR 개발환경 구축 방법
3. 터틀봇3 펌웨어
참고)
강의: https://www.youtube.com/watch?v=VKNVj9IDMeo&list=PLRG6WP3c31_VIFtFAxSke2NG_DumVZPgw&index=9&ab_channel=ROBOTISOpenSourceTeam
자료: https://github.com/robotpilot/ros-seminar/blob/master/09_%EC%9E%84%EB%B2%A0%EB%94%94%EB%93%9C_%EC%8B%9C%EC%8A%A4%ED%85%9C.pdf
