스미스-워터맨(Smith-Waterman) 알고리즘: DPX(Dynamic Programming eXtensions) 명령어
Artificial Intelligence
스미스–워터맨(Smith–Waterman) 알고리즘
-
두 서열(sequence)의 지역적 유사성(local similarity) 을 찾기 위한 지역 서열 정렬(Local Sequence Alignment) 알고리즘
- 생물정보학에서 DNA, RNA, 단백질 서열 비교에 자주 사용되며, Needleman–Wunsch 알고리즘(전역 정렬)과 대조되는 개념입니다.
-
목표: 두 서열의 가장 유사한 부분 구간(subsequence) 을 찾는다.
-
핵심 차이점
-
Needleman–Wunsch: 전체 서열을 처음부터 끝까지 정렬 (Global Alignment)
-
Smith–Waterman: 서열의 일부 구간만 최적 정렬 (Local Alignment)
-
-
즉, 전체 길이가 아니라 부분적으로 가장 닮은 영역을 찾는 데 집중합니다.
2. 점수 체계 (Scoring Scheme)
- 보통 다음과 같은 점수를 설정합니다.
MATCH = +1 (같은 문자일 때)
MISMATCH = -1 (다를 때)
GAP = -2 (공백 삽입 시)이 점수는 문제나 데이터에 따라 달라질 수 있습니다.
3. 알고리즘 단계
1) DP 테이블 초기화
-
길이가 각각
m,n인 두 서열A,B가 있다고 하면
(m+1) × (n+1)크기의 DP 테이블H를 만듭니다. -
모든 셀을 0으로 초기화합니다.
- 전역 정렬과 달리, 스미스–워터맨은 음수 점수를 허용하지 않기 때문에
0이 매우 중요합니다.
- 전역 정렬과 달리, 스미스–워터맨은 음수 점수를 허용하지 않기 때문에
H[0][j] = 0
H[i][0] = 02) 점수 계산식
- 각 셀
(i, j)에서 가능한 세 가지 방향을 고려합니다.
1) 대각선 ↖ : H[i-1][j-1] + (MATCH or MISMATCH)
2) 위쪽 ↑ : H[i-1][j] + GAP
3) 왼쪽 ← : H[i][j-1] + GAP- 이 중 가장 큰 값을 취하되, 음수일 경우 0으로 초기화합니다.
즉,
H[i][j] = max(
0,
H[i-1][j-1] + score(A[i], B[j]),
H[i-1][j] + GAP,
H[i][j-1] + GAP
)-
이 “0”이 들어가는 부분이 바로 지역 정렬(Local alignment) 의 핵심입니다.
- 점수가 0이 되는 순간, 새로운 지역 구간이 시작된다고 해석합니다.
3) 최댓값 찾기
-
DP 테이블을 모두 채운 후,
H[i][j]값 중 가장 큰 값이 최적 지역 정렬 점수입니다.- 그 셀이 바로 최적 구간의 끝을 의미합니다.
4) 추적(Traceback)
-
최댓값 위치에서 시작해서 대각선(↖), 위(↑), 왼쪽(←)으로 거슬러 올라가며 점수가 0이 되는 지점까지 역추적합니다.
- 이때 따라간 경로가 가장 유사한 지역 서열 구간을 나타냅니다.
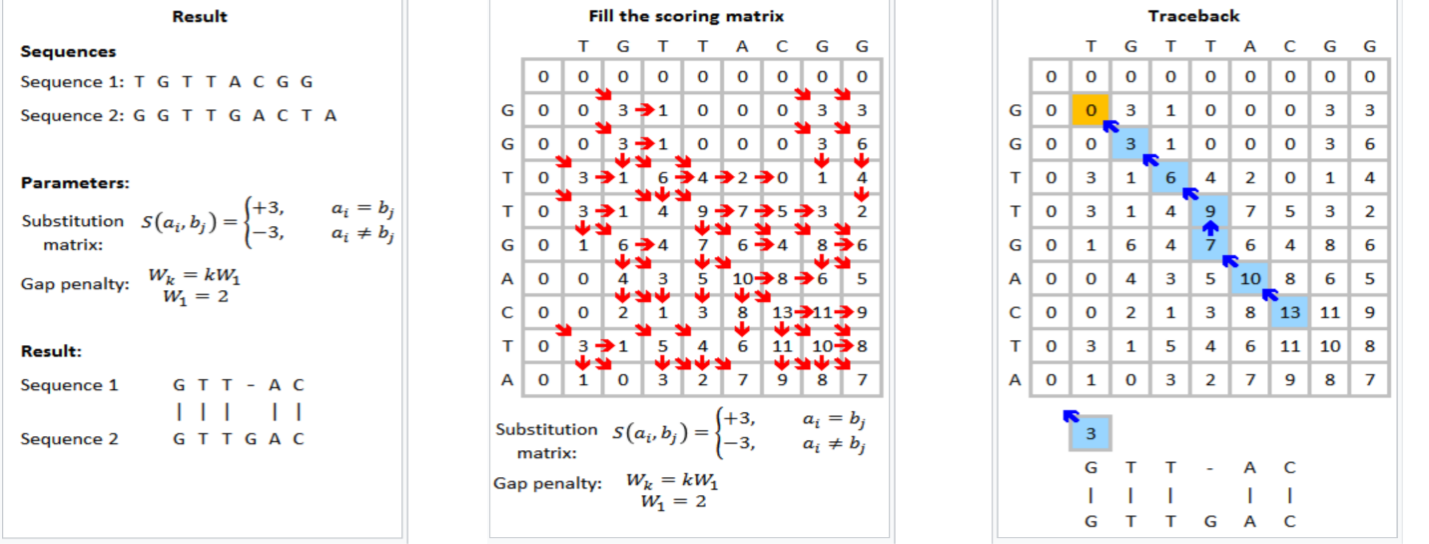
4. 예시
A = "ACACACTA"
B = "AGCACACA"- DP 계산 후 최댓값이 6이라면,해당 위치에서 역추적하면 예를 들어 이런 정렬이 나올 수 있습니다:
A: ACACACTA
B: AGCACACA
||||
CACA (local match)- 즉, 전체 서열이 아니라
"CACA"구간이 가장 유사한 부분으로 탐지됩니다.
5. 스미스–워터맨 vs 니들먼–운치 비교
| 구분 | Smith–Waterman | Needleman–Wunsch |
|---|---|---|
| 정렬 방식 | 지역 정렬 (부분 서열) | 전역 정렬 (전체 서열) |
| 초기화 | 전부 0 | 첫 행·열은 누적 gap |
| 음수 점수 | 0으로 클리핑 | 음수 허용 |
| 사용 예시 | 유사 구간 탐색, BLAST | 전체 서열 비교 |
| 최댓값 | DP 내 임의의 위치 | DP 마지막 셀 (끝점) |
6. 파이썬 예시 코드
import numpy as np
def smith_waterman(seq1, seq2, match=1, mismatch=-1, gap=-2):
m, n = len(seq1), len(seq2)
H = np.zeros((m+1, n+1), dtype=int)
max_score = 0
max_pos = None
# DP 테이블 채우기
for i in range(1, m+1):
for j in range(1, n+1):
score_diag = H[i-1][j-1] + (match if seq1[i-1] == seq2[j-1] else mismatch)
score_up = H[i-1][j] + gap
score_left = H[i][j-1] + gap
H[i][j] = max(0, score_diag, score_up, score_left)
if H[i][j] > max_score:
max_score = H[i][j]
max_pos = (i, j)
# Traceback
i, j = max_pos
aligned1, aligned2 = "", ""
while i > 0 and j > 0 and H[i][j] > 0:
if H[i][j] == H[i-1][j-1] + (match if seq1[i-1] == seq2[j-1] else mismatch):
aligned1 = seq1[i-1] + aligned1
aligned2 = seq2[j-1] + aligned2
i -= 1; j -= 1
elif H[i][j] == H[i-1][j] + gap:
aligned1 = seq1[i-1] + aligned1
aligned2 = "-" + aligned2
i -= 1
else:
aligned1 = "-" + aligned1
aligned2 = seq2[j-1] + aligned2
j -= 1
return max_score, aligned1, aligned2, H6. DPX(Dynamic Programming eXtensions) 명령어
-
Smith–Waterman의 셀 갱신 식을 Hopper(H100)에서 DPX( Dynamic Programming accelerators ) 내장 연산으로 묶어 주면, 전형적인
add + {min/max} + clamp(0)패턴을 한 번에 처리할 수 있다. -
NVIDIA가 공개한 DPX SIMD 내장함수(인트린식) 예시는 다음과 같습니다.
-
__vimax3_s16x2_relu(a,b,c)→ 반워드(16비트) 단위로max(max(max(a,b),c), 0)수행 -
__viaddmax_s16x2_relu(a,b,c)→ 반워드 단위로(a+b)와c의 max, 그리고 ReLU(0 하한 클램프) 까지 한 번에 수행 -
__viaddmin_s16x2_relu(a,b,c)→ 반워드 단위로(a+b)와c의 min, 그리고 ReLU 수행
-
- 이 인트린식들은 CUDA 12에서 DPX API로 노출되며, Hopper(Compute Capability 9.x)에서 하드웨어 가속되고 구세대에서는 소프트웨어 대체 경로가 사용됩니다. (NVIDIA Developer, NVIDIA Docs)
1) SW(로컬 정렬, affine gap)의 DPX 매핑 감각
-
Affine gap 버전의 전형적 재귀식(점수는 16비트 정수 가정, ReLU는 로컬 정렬의
max(…,0)에 해당)-
치환/대각(매치·미스매치):
M[i][j] = H[i-1][j-1] + s(x_i, y_j) -
삽입(위에서 내려옴)
I[i][j] = max(H[i-1][j] + go+ge, I[i-1][j] + ge)
-
삭제(왼쪽에서 옴)
D[i][j] = max(H[i][j-1] + go+ge, D[i][j-1] + ge)
-
최종 셀
H[i][j] = max(0, M[i][j], I[i][j], D[i][j])
-
-
여기서
go(gap open),ge(gap extend)는 음수 패널티고, 우리는 반워드 2개(s16x2)를 한꺼번에 갱신해 대역폭/스루풋을 끌어올립니다.I/D갱신은 “add 후 max” 패턴이므로__viaddmax_s16x2_relu와 잘 맞고, 최종H는 “3-way max + ReLU”라__vimax3_s16x2_relu가 적합합니다.
2) 예시 CUDA C++ 커널 (s16x2로 2셀씩 갱신)
교육·시작용 미니멀 예시입니다. 실제 서비스 수준에선 타일링, 워프 간 동기화, 메모리 coalescing, anti-diagonal 처리, bank 충돌 회피, traceback 압축 저장 등을 추가하세요.
// nvcc -O3 -arch=sm_90a sw_dpx.cu -o sw_dpx
#include <cuda_runtime.h>
#include <stdint.h>
// DPX SIMD intrinsics (CUDA 12+; Hopper에서 HW 가속)
// - __viaddmax_s16x2_relu(a,b,c): per-halfword ReLU(max(a+b, c))
// - __vimax3_s16x2_relu(a,b,c): per-halfword ReLU(max(a,b,c))
extern "C" __device__ unsigned int __viaddmax_s16x2_relu(unsigned int, unsigned int, unsigned int);
extern "C" __device__ unsigned int __vimax3_s16x2_relu(unsigned int, unsigned int, unsigned int);
// 유틸: s16x2 pack/unpack
__device__ inline unsigned pack_s16x2(short lo, short hi) {
return (unsigned)((uint16_t)lo | ((uint32_t)(uint16_t)hi << 16));
}
__device__ inline short lo_s16(unsigned u){ return (short)(u & 0xFFFF); }
__device__ inline short hi_s16(unsigned u){ return (short)((u >> 16) & 0xFFFF); }
// 간단한 점수표: match=+2, mismatch=-1 (16비트 안전)
__device__ inline short sub_score(char a, char b) { return (a==b) ? 2 : -1; }
// 커널 가정:
// - 한 워프가 한 anti-diagonal 스트립을 담당 (데모 목적)
// - H/I/D는 s16로 저장 (점수 범위 확인 필수)
// - traceback은 생략 (필요 시 방향 비트패킹 버퍼 추가)
__global__ void sw_dpx_kernel(
const char* __restrict__ A, int M,
const char* __restrict__ B, int N,
short gap_open, short gap_ext,
short* __restrict__ H, // (M+1) x (N+1)
short* __restrict__ I,
short* __restrict__ D)
{
// 간단화를 위해: 각 스레드가 (i,j)와 (i,j+1) 두 셀(s16x2)을 한 번에 처리한다 가정
int j = (blockIdx.x * blockDim.x + threadIdx.x) * 2 + 1; // 1..N-1
int i = blockIdx.y + 1; // 1..M
if (i > M || j > N) return;
// 이전 셀 값 로드
// 인덱싱: row-major, pitch = (N+1)
int pitch = N + 1;
// 상( i-1, j ), ( i-1, j+1 )
short H_up0 = H[(i-1)*pitch + j];
short H_up1 = (j+1 <= N) ? H[(i-1)*pitch + (j+1)] : 0;
short I_up0 = I[(i-1)*pitch + j];
short I_up1 = (j+1 <= N) ? I[(i-1)*pitch + (j+1)] : (short)0;
// 좌( i, j-1 ), ( i, j )
short H_lt0 = H[i*pitch + (j-1)];
short H_lt1 = H[i*pitch + j];
short D_lt0 = D[i*pitch + (j-1)];
short D_lt1 = D[i*pitch + j];
// 대각( i-1, j-1 ), ( i-1, j )
short H_dg0 = H[(i-1)*pitch + (j-1)];
short H_dg1 = H[(i-1)*pitch + j];
// 서브스코어 계산 (두 칸 패킹)
short s0 = sub_score(A[i-1], B[j-1]);
short s1 = (j+1 <= N) ? sub_score(A[i-1], B[j]) : (short)-1;
unsigned S = pack_s16x2(s0, s1);
// 상방향 갭 갱신: I = max(H_up + go+ge, I_up + ge), ReLU(0) 불필요 (음수가 유효) → 하지만
// 최종 H에서 ReLU 처리하므로 중간 I/D는 음수 허용. 여기서는 viaddmax_relu를 써도 무방(0클램프가 들어감).
// -> 정확하게 음수를 유지하려면 _relu가 없는 변형을 쓰는게 이상적이나, 공개 API는 _relu변형이 대표적.
// 교육용 예시: 0 하한이 들어가도 보통 gap이 음수 패널티이므로 max(…,0)이 H에서 걸리기 전에 I/D가 0에 눌릴 수 있음.
// 실제 프로덕션에선 CUDA 버전에 따라 _relu 없는 변형/정밀 흐름을 선택하거나 오프셋을 더해 양수영역으로 치우치는 구현을 고려하세요.
short go_ge = gap_open + gap_ext; // 음수
unsigned V_go_ge = pack_s16x2(go_ge, go_ge);
unsigned V_ge = pack_s16x2(gap_ext, gap_ext);
unsigned V_Hup = pack_s16x2(H_up0, H_up1);
unsigned V_Iup = pack_s16x2(I_up0, I_up1);
unsigned V_Hlt = pack_s16x2(H_lt0, H_lt1);
unsigned V_Dlt = pack_s16x2(D_lt0, D_lt1);
unsigned V_Hdg = pack_s16x2(H_dg0, H_dg1);
// I 갱신: max(H_up + go+ge, I_up + ge)
unsigned I_cand1 = __viaddmax_s16x2_relu(V_Hup, V_go_ge, V_Iup); // ReLU 포함
unsigned I_new = __viaddmax_s16x2_relu(V_Iup, V_ge, I_cand1);
// D 갱신: max(H_lt + go+ge, D_lt + ge)
unsigned D_cand1 = __viaddmax_s16x2_relu(V_Hlt, V_go_ge, V_Dlt);
unsigned D_new = __viaddmax_s16x2_relu(V_Dlt, V_ge, D_cand1);
// 대각 매치/미스매치: M = H_dg + S
// (ReLU는 H에서 처리)
short M0 = (short)(H_dg0 + s0);
short M1 = (short)(H_dg1 + s1);
unsigned V_M = pack_s16x2(M0, M1);
// 최종 H: max(0, M, I, D) → 3-way max + ReLU (M vs I vs D) 후 0과도 max
// vimax3_relu가 (a,b,c,0)을 모두 처리
unsigned H_tmp = __vimax3_s16x2_relu(V_M, I_new, D_new);
// 결과 저장
short H0 = lo_s16(H_tmp), H1 = hi_s16(H_tmp);
short I0 = lo_s16(I_new), I1 = hi_s16(I_new);
short D0 = lo_s16(D_new), D1 = hi_s16(D_new);
H[i*pitch + j] = H0;
if (j+1 <= N) H[i*pitch + (j+1)] = H1;
I[i*pitch + j] = I0;
if (j+1 <= N) I[i*pitch + (j+1)] = I1;
D[i*pitch + j] = D0;
if (j+1 <= N) D[i*pitch + (j+1)] = D1;
}
// 호스트 래퍼(데모용): 그리드/블록 구성은 시퀀스 길이에 맞게 조정
void launch_sw_dpx(const char* d_A, int M, const char* d_B, int N,
short go, short ge, short* d_H, short* d_I, short* d_D,
cudaStream_t stream=0)
{
dim3 block(128, 1, 1); // 128스레드 → j를 2칸씩 처리
dim3 grid((N + 1 + block.x*2 - 1)/(block.x*2), M, 1);
sw_dpx_kernel<<<grid, block, 0, stream>>>(d_A, M, d_B, N, go, ge, d_H, d_I, d_D);
}빌드/런 팁
- 컴파일:
nvcc -O3 -arch=sm_90a sw_dpx.cu -o sw_dpx
(H100은sm_90a/sm_90계열. 로컬 환경에 맞춰 지정)- CUDA 12+에서 DPX 인트린식이 제공되며 Hopper에서 하드웨어 가속. 구세대 GPU에서는 소프트웨어 에뮬레이션 경로라 속도 이점이 줄어듭니다. (NVIDIA Docs)
- 점수 범위가
int16을 넘지 않도록go,ge,match/mismatch와 서열 길이 상한을 조절하세요(오버플로 방지). CUDASW++4.0 같은 최신 구현은 DPX 활용 + 타일링/패킹 최적화를 통해 큰 이득을 얻습니다. (BioMed Central)
3) 정확도/성능 관련 주의
-
ReLU의 위치
-
위 예시는 교육용으로
I/D갱신에도_relu변형을 사용했지만, 이론적으로는I/D상태값이 음수도 유효합니다(최종H에서만 0 하한). -
CUDA 버전에 따라
_relu없는 변형을 선택하거나, 내부 점수에 상수 오프셋을 더해 양수 영역에서 연산한 뒤 마지막에 오프셋 제거하는 테크닉을 쓰면 수학적으로 더 깔끔합니다. (공식 블로그는_relu변형을 SW에서 적극 활용하는 예시를 보여줍니다.)
-
-
패킹과 동시성
- 여기선 s16x2로 “가로 2셀”을 처리했지만, 실제론 anti-diagonal 파이프라이닝, 타일 단위 공유메모리 캐싱, 워프 셔플 등을 조합해야 메모리 병목을 줄이고 DPX의 장점을 극대화할 수 있습니다. CUDASW++4.0은 이 부분을 정교하게 구현합니다.
-
스피드업 기대치
-
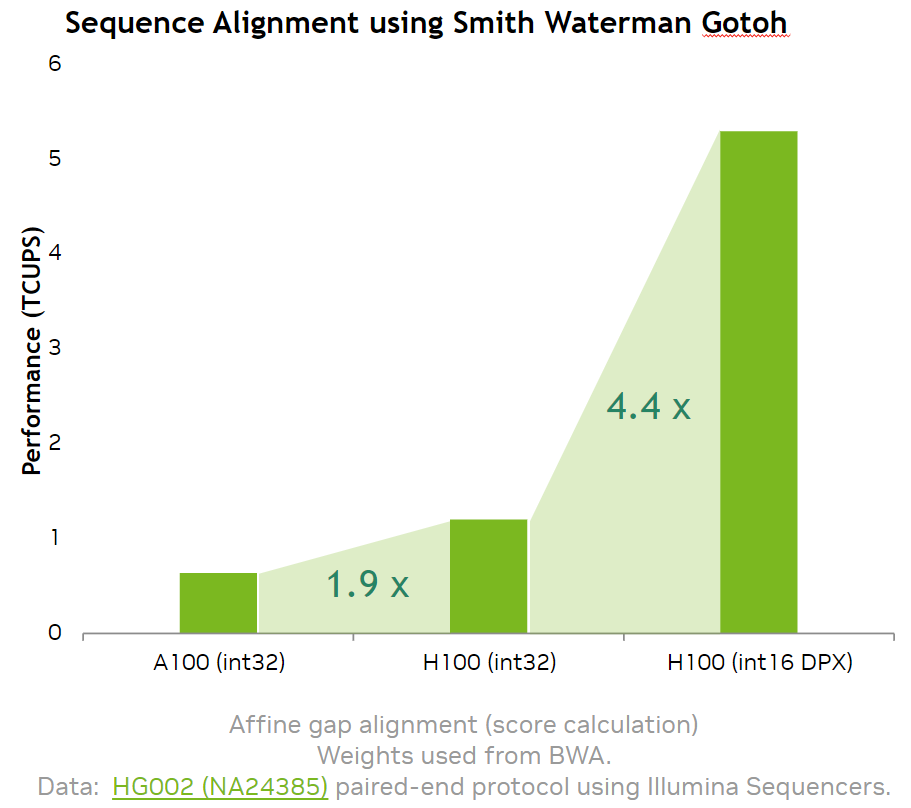
NVIDIA는 H100에서 SW 스코어링 단계가 A100 대비 ~7–8× 가속된다고 보고합니다(내부 루프 DPX화).
- 워크로드/길이/구현에 따라 달라집니다.
-
