
MLP의 중요 개념들
일반적으로 훈련 샘플의 개수는 아주 많다.
풀배치 학습(full batch learning)온라인 학습(online learning)미니배치 학습(mini batch learning)
📗 풀배치 학습
풀 배치 학습은 신경망 학습에서 모든 훈련 샘플을 한 번에 처리하는 방식이다.
이 방법은 평균 그래디언트를 계산하여 가중치를 업데이트하는 방식으로 진행된다.
하지만, 많은 샘플을 한번에 처리하기 때문에 시간이 많이 걸리고 계산이 느릴 수 있다.
-
가중치와 바이어스를 0부터 1 사이의 난수로 초기화.
-
수렴할 때까지 모든 가중치에 대해 다음을 반복.
-
모든 훈련 샘플을 처리하여 평균 그래디언트
-
가중치 업데이트:
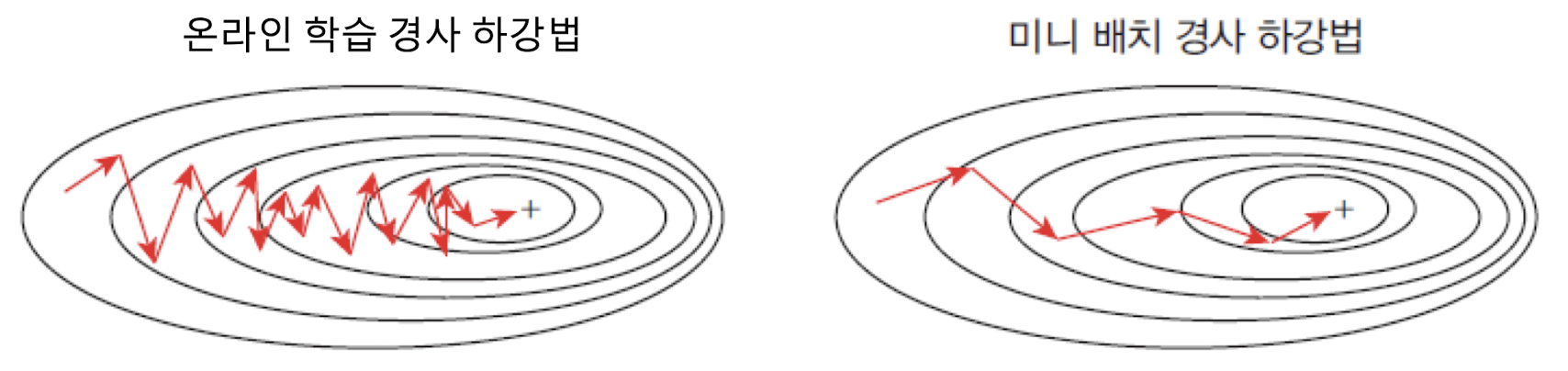
📘 온라인 학습
온라인 학습은 훈련 샘플 중에서 무작위로 하나의 샘플을 선택하여 가중치를 업데이트하는 방식이다.
이 방법은 계산이 쉽고 샘플마다 빠르게 학습이 가능하지만, 샘플 선택에 따라 우왕좌왕하기 쉽다.
-
가중치와 바이어스를 0부터 1 사이의 난수로 초기화.
-
수렴할 때까지 모든 가중치에 대해 반복.
-
훈련 샘플 중에서 무작위로 i번째 샘플을 선택.
-
그래디언트 계산:
-
가중치 업데이트: $w(t+1) = w(t) - \eta \cdot \frac{\partial E}
📙 미니배치 학습
미니배치 학습은 풀 배치와 온라인 학습의 중간 형태로, 훈련 샘플을 B개씩 묶어서 처리하는 방식이다.
빠르게 계산하면서도 안정적인 학습을 할 수 있다.
-
가중치와 바이어스를 0부터 1 사이의 난수로 초기화.
-
수렴할 때까지 반복.
-
훈련 샘플 중에서 무작위로 B개의 샘플을 선택.
-
그래디언트 계산:
-
가중치 업데이트:

📦 미니배치 실습 code
import numpy as np
import tensorflow as tf
# 데이터를 학습 데이터와 테스트 데이터로 나눈다.
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.mnist.load_data()
data_size = x_train.shape[0]
batch_size = 12 # 배치 크기
# 배치 크기 많큼 랜덤하게 선택
selected = np.random.choice(data_size, batch_size)
print(selected)
x_batch = x_train[selected]
y_batch = y_train[selected]
# 미니 배치 사용할 경우 MSE 함수
def MSE(t, y):
size = y.shape[0]
return 0.5 * np.sum((y - t) ** 2) / size
[58298 3085 27743 33570 35343 47286 18267 25804 4632 10890 44164 18822]🖇️ 미니배치 행렬로 구현하기
XOR 연산 학습을 위한 신경망 설계:
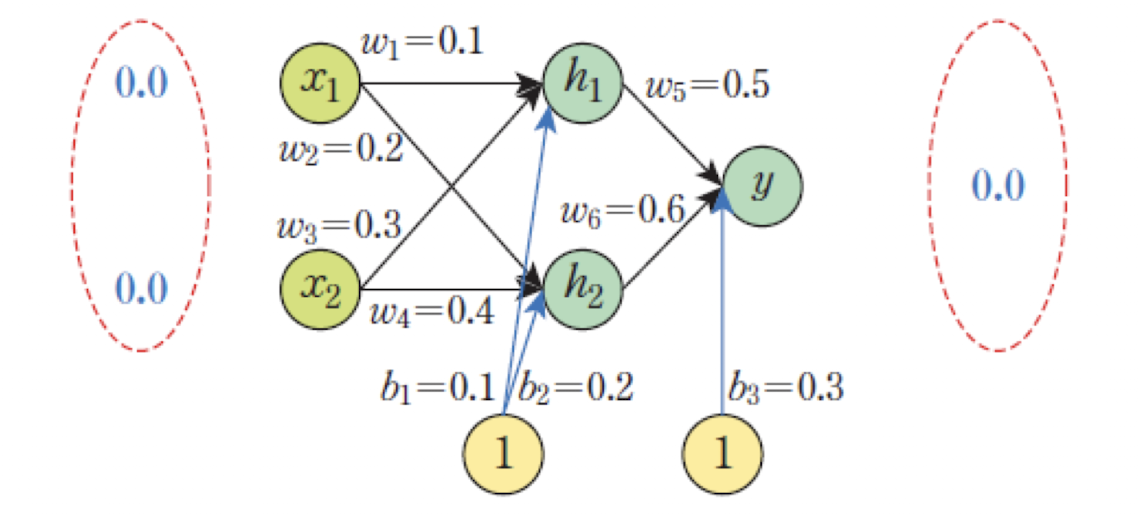
행렬계산:
- : 은닉층 유닛이 받은 입력의 총합을 나타내는 행렬
- : 활성화 함수 적용 후 은닉층의 출력
- : 출력층 유닛이 받은 입력의 총합
- : 출력층의 활성화 함수 적용 후 최종 출력
- 은 은닉층 유닛이 받는 입력의 총합을 나타내는 행렬
- 은 을 활성화함수에 대입한 후의 행렬
- 는 출력층 유닛이 받는 입력의 총합을 나타내는 행렬
- 는 에 출력층의 활성화함수를 적용하여 얻은 출력층 유닛의 출력
🖇️ 미니배치 오차 역전파
- Loss Function:
- Activation Function:
①
②
③

가중치 업데이트:
샘플이 4개 이므로 4로 나누어서 평균 gradient를 계산하고 여기에 학습률을 곱하여 를 업데이트한다.
📦 미니배치의 구현
import numpy as np
# 시그모이드 함수
def actf(x):
return 1 / (1 + np.exp(-x))
# 시그모이드 함수의 미분치
def actf_deriv(x):
return x * (1 - x)
# 입력유닛, 은닉유닛 및 출력유닛의 개수
inputs, hiddens, outputs = 2, 2, 1
learning_rate = 0.5
# 훈련 입력과 출력
X = np.array([[0, 0], [0, 1], [1, 0], [1, 1]])
T = np.array([[0], [1], [1], [0]])
# 가중치를 –1.0에서 1.0 사이의 난수로 초기화한다.
W1 = 2 * np.random.random((inputs, hiddens)) - 1
W2 = 2 * np.random.random((hiddens, outputs)) - 1
B1 = np.zeros(hiddens)
B2 = np.zeros(outputs)# 순방향 전파 계산
def predict(x):
layer0 = x # 입력을 layer0에 대입한다.
Z1 = np.dot(layer0, W1) + B1 # 행렬의 곱을 계산한다.
layer1 = actf(Z1) # 활성화 함수를 적용한다.
Z2 = np.dot(layer1, W2) + B2 # 행렬의 곱을 계산한다.
layer2 = actf(Z2) # 활성화 함수를 적용한다.
return layer0, layer1, layer2
# 역방향 전파 계산
def fit():
global W1, W2, B1, B2
for i in range(60000):
layer0, layer1, layer2 = predict(X)
layer2_error = layer2 - T
layer2_delta = layer2_error * actf_deriv(layer2)
layer1_error = np.dot(layer2_delta, W2.T)
layer1_delta = layer1_error * actf_deriv(layer1)
W2 += -learning_rate * np.dot(layer1.T, layer2_delta) / 4.0
W1 += -learning_rate * np.dot(layer0.T, layer1_delta) / 4.0
B2 += -learning_rate * np.sum(layer2_delta, axis=0) / 4.0
B1 += -learning_rate * np.sum(layer1_delta, axis=0) / 4.0# 테스트 함수
def test():
for x, y in zip(X, T):
x = np.reshape(x, (1, -1)) # 하나여도 2차원 형태이어야 한다.
layer0, layer1, layer2 = predict(x)
print(x, y, layer2)
# 학습 및 테스트 실행
fit()
test()[[0 0]] [0] [[0.0124954]]
[[0 1]] [1] [[0.98683933]]
[[1 0]] [1] [[0.9869228]]
[[1 1]] [0] [[0.01616628]]🏫 학습률
learning rate
-
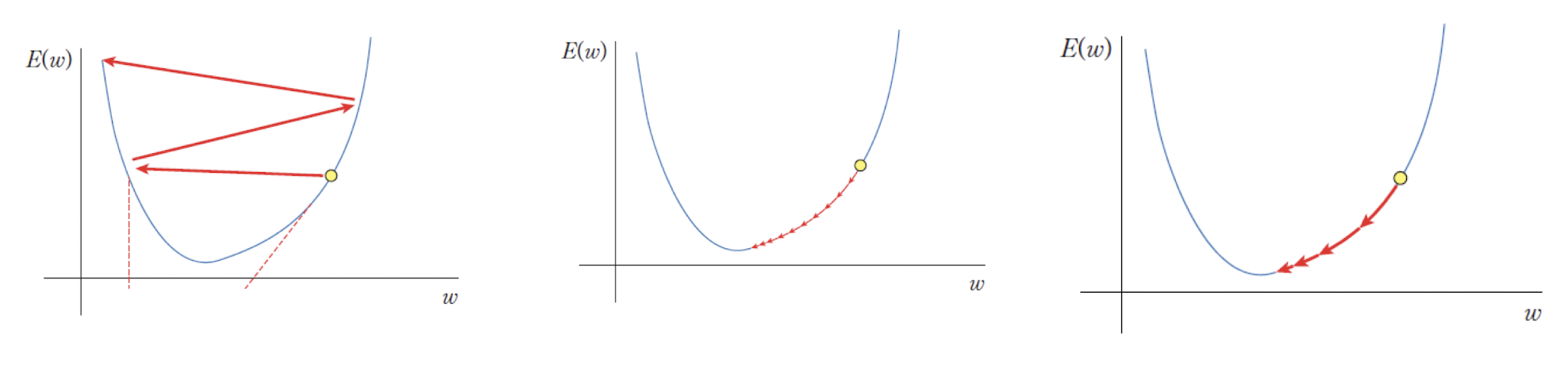
학습률은 신경망 학습에서 가중치를 얼마나 크게 변경할지 결정하는 값이다. -
너무
큰학습률은오버슈팅을 발생시켜 최적점을 지나치게 될 수 있다. -
너무
작은학습률은 학습 속도가 느려지며,지역 최소값에 빠질 위험이 있다. -
적절한 학습률을 설정하면 최적화 과정이 원활하게 진행된다.
momentum
-
모멘텀은 이전 가중치 변화량을 반영하여 가속도를 추가하는 방법이다. -
이 방법을 통해 가중치가
지역 최솟값을 벗어나전역 최솟값을 찾는 데 도움이 된다.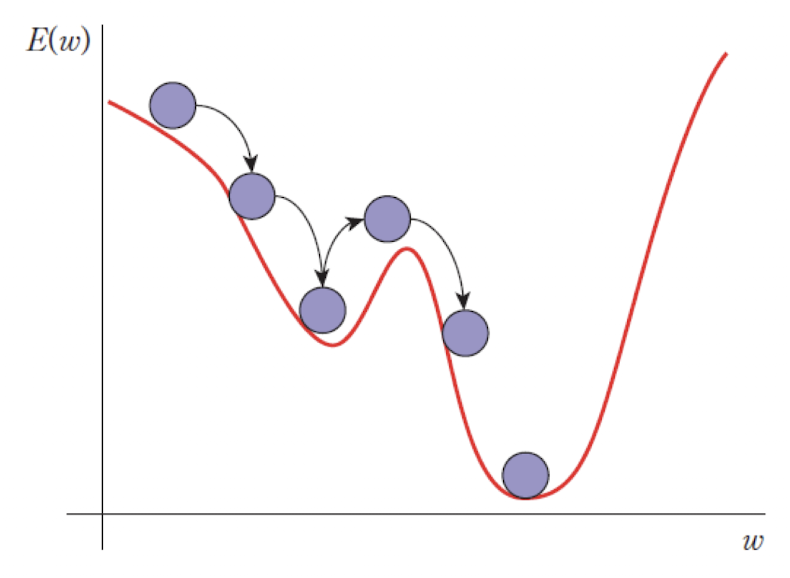
Adagrad
가변 학습률을 사용하는 방법으로 SGD 방법을 개량한 최적화 방법이다.- 주된 방법은
학습률 감쇠(learning rate decay)이다. - Adagrad는 학습률을 이전 단계의
기울기들을누적한 값에 반비례하여서 설정한다.
RMSprop
- Adagrad에 대한 수정판
- Adadelta와 유사하지만 그래디언트 누적 대신에
지수 가중 이동 평균을 사용한다.
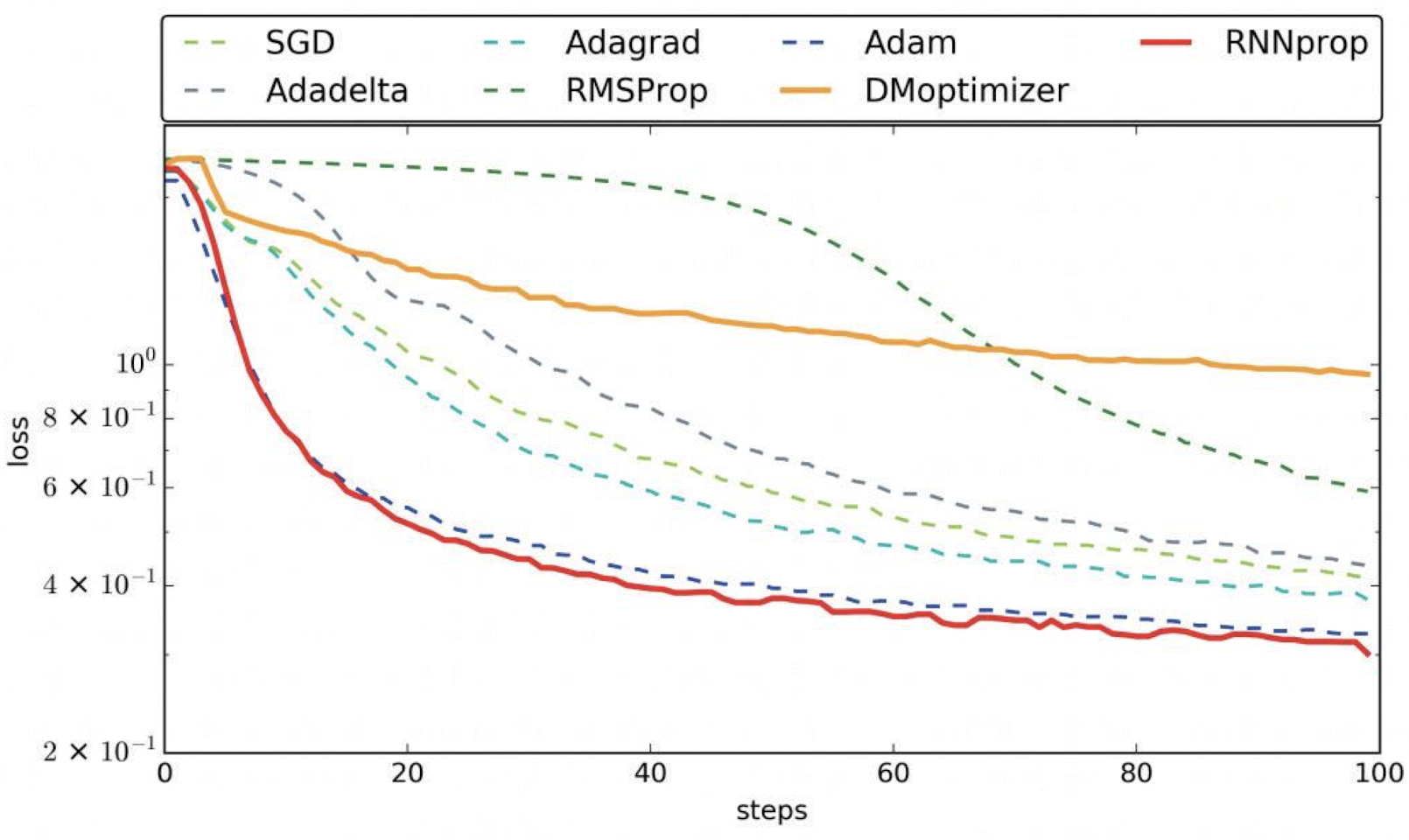
Adam
- Adaptive Moment Estimation의 약자이다.
- Adam은 기본적으로 (RMSprop+모멘텀)이다.
현재가장 인기 있는최적화 알고리즘 중에 하나이다.
🏷️ Summary
학습 방법과 학습률
-
풀 배치는 전체 데이터를 처리한 후 가중치를 업데이트하며 안정적이지만 느리다.
-
SGD는 하나의 샘플만 보고 업데이트하므로 빠르지만 불안정하다.
-
미니 배치는 그 중간으로, 여러 샘플을 묶어 균형 잡힌 학습을 진행한다.
-
학습률은 핵심 하이퍼파라미터이며, RMSprop, Adam과 같은 알고리즘은 적응적으로 학습률을 조정한다.
