기초부터 쌓아가는 머신러닝 #4
4주차 : 선형회귀 이론 및 실습
- 선형 회귀란 무엇인가
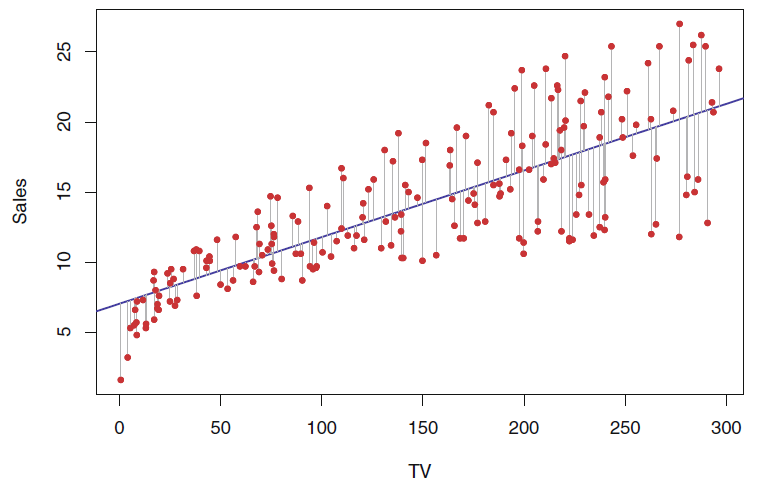
- 선형회귀는 하나 이상의 특성과 연속적인 타깃 변수 사이의 관계를 모델링 하는 것
- 연속적인 출력 값을 예측하는 것
- 특성이 하나인 선형 모델 공식
Y = W0 + W1*X
where W0 : y축 절편, W1 : 특성의 가중치
✔ 목적 : 특성과 타깃 사이의 관계를 나타내는 선형 방정식의 가중치(W)를 학습하는 것
- 선형 회귀 모델의 훈련과 비용함수
-
모델의 훈련이란
✔ 모델이 훈련 데이터에 잘 맞도록 모델 파라미터를 설정하는 것
✔ 모델이 훈련 데이터에 얼마나 잘 들어맞는지 측정해야 함 -
모델 훈련에 필요한 비용함수 종류
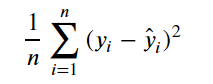
✔ MSE (Mean Squared Error)
1. 회귀 모델의 주요 손실 함수
2. 참값과 예측값의 차이인 오차들의 제곱 평균으로 정의
3. 제곱을 해주기 때문에 이상치(outlier)에 민감
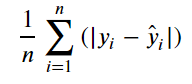
✔ MAE (Mean Absolute Error)
1. 참값과 예측값의 차이인 오차들의 절대값 평균
2. MSE보다 이상치에 덜 민감
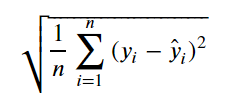
✔ RMSE (Root Mean Squared Error)
1. MSE에 root을 취해 준 것
2. 참값과 비슷한 값으로 변환하기 때문에 해석이 쉬워짐
👍 보통 quadratic(2차 곡선형태) 형태의 미분 편의성이 좋기 때문에, 회귀 모형의 비용함수로 MSE를 많이 사용한다.
- 선형 회귀 모델의 최적화 방법
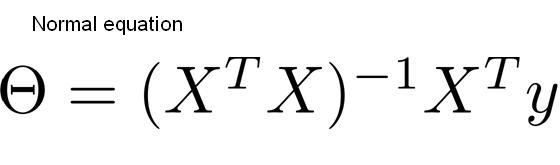
1.정규방정식
- 비용 함수를 최소화하는 θ 값을 찾기 위한 해석적 방법
- 정규방정식은 n개의 특성수에 따라서 (n+1) x (n+1)의 X XT 역행렬을 계산한다.
- 이 말은 특성의 수가 많아지면 정규방정식의 구현속도가 느려진다.
- 하지만 다행히도 모델의 복잡도가 훈련 세트의 샘플 수와 특성 수에 선형적으로 증가한다.
- 메모리 공간이 충분하다면 큰 훈련 세트도 효율적으로 처리 가능
- 비용함수(MSE)를 w에 대해 미분을 하면 아래와 같은 식이 나오게 된다.
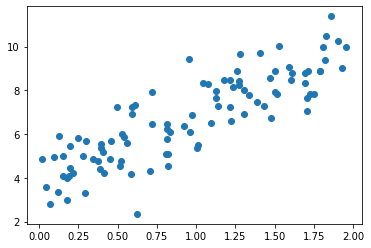
import matplotlib.pyplot as plt import numpy as np x = 2 * np.random.rand(100,1) # [0, 1) 범위에서 균일한 분포 100 X 1 array y = 4 + 3*x + np.random.randn(100,1) # normal distribution(mu=0,var=1)분포 100 X 1 array plt.scatter(x,y) plt.show()
x_b = np.c_[np.ones((100,1)),x] # 모든 샘플에 index 0번에 1을 추가 # np.linalg.inv는 넘파이 선형대수 모듈(linalg)의 inv(역함수) # .dot은 행렬 곱셈 theta_best = np.linalg.inv(x_b.T.dot(x_b)).dot(x_b.T).dot(y) theta_best > array([[ 4.93296992], [-0.41991499]])
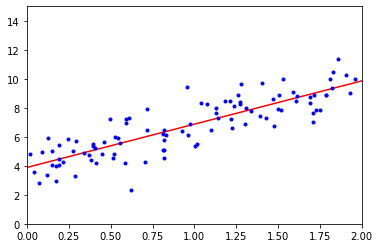
- 기존의 목적함수가 y = 4 + 3*x + np.random.randn(100,1)라서, 예측한 θ0 : 4, θ1 : 3을 기대했지만, 비슷하긴해도 노이즈 때문에 원래의 파라미터를 맞출 수 없었다.
# theta_best를 사용해서 y 값 예측 x_new = np.array([[0],[2]]) x_new_b = np.c_[np.ones((2,1)),x_new] prediction = x_new_b.dot(theta_best) prediction > array([[4.93296992], [4.09313993]]) plt.plot(x_new,prediction,"r-") plt.plot(x,y,"b.") plt.axis([0,2,0,15]) # x축 범위 0~2, y축 범위 0~15 plt.show()
- 위와 같은 작업을 아래와 같이 sklearn(사이킷런) 라이브러리를 사용하여 구현할 수 있다.
from sklearn.linear_model import LinearRegression lin_reg = LinearRegression() lin_reg.fit(x,y) print(lin_reg.intercept_,lin_reg.coef_) > [3.88883297] [[2.98499978]] print(lin_reg.predict(x_new)) >array([[3.88883297], [9.85883253]])
2.경사 하강법
-
여러 종류의 문제에서 최적의 방법을 찾을 수 있는 매우 일반적인 최적화 알고리즘
-
기본 메커니즘은 지정한 비용 함수를 최소화하기 위해 파라미터를 반복적으로 수정하는 것

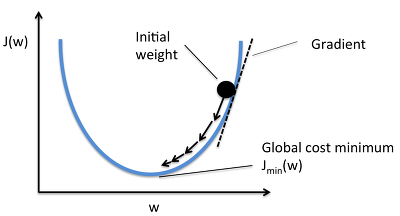
짙은 안개 속, 앞이 전혀 보이지 않고 오로지 발 끝에 산의 기울기만 느낄 수 있다고 생각해보자. 이 숲을 벗어나기 위한 가장 좋은 방법은 가장 기울기가 급한 길을 따라서 내려가는 것이다. 이것이 경사 하강법 원리다. -
무작위로 벡터 θ를 초기화한다.
-
파라미터 벡터 θ에 대해 비용 함수(Loss Function)의 현재 그래디언트를 계산한다.
-
그리고 그래디언트가 감소하는 방향으로 진행하면서, 최종적으로 계산된 그래디언트가 0이 되면 최솟값에 도달하도록 해야 한다.
-
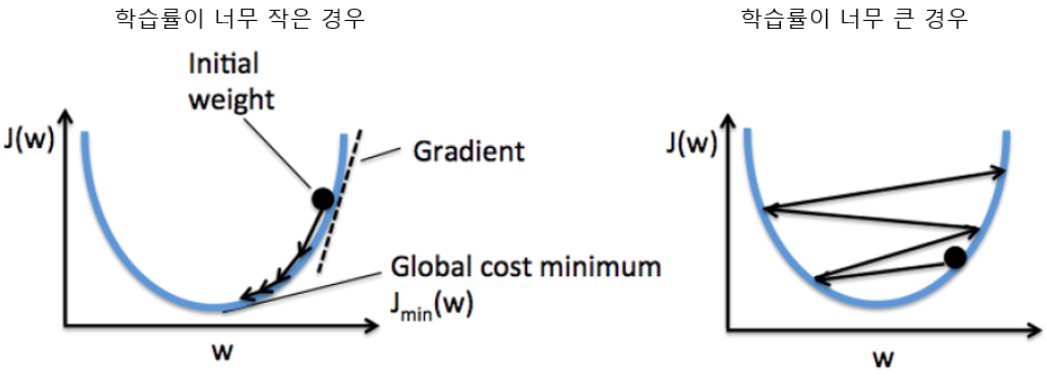
위 그림처럼 경사 하강법에서 최적화 시키는 방향으로 가게 하는 중요한 하이퍼파라미터 step(learning rate)를 결정해야 한다.
-
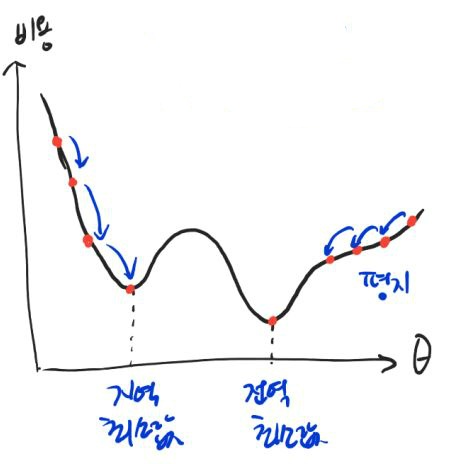
실제 모든 비용함수는 위와 같이 quadratic(이차원)하게 표현되지 않고 울긋불긋하게 솟았다가 내려앉았다가 한다.
-
학습률이 너무 작은 경우에는 local minumum(지역 최소값)에 빠지게 된다.
-
학습률이 너무 큰 경우에는 수렴이 되지 않게 된다.
-
그래서 위 그림처럼 학습률을 잘 조정해야지, global minumum(최적의 값)으로 잘 수렴할 수 있다.
-
다행히도 선형 회귀의 MSE 비용 함수는 convex function(볼록 함수)이기 때문에, local minum이 없고, global minimum만 존재한다.
-
그래서 충분한 시간과 적절한 학습률만 주어진다면, global minimum에 최대한 근접할 수 있다.
-
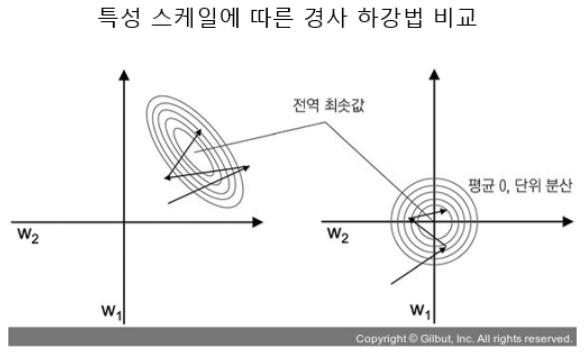
위 그림처럼 오른쪽의 경사 하강법은 곧장 global minimum으로 내려갈 수 있다.
-
왼쪽의 그림에서 완만한 경사를 만나게 되면 global minimum으로 내려갈 수는 있지만 더 오래 걸린다.
-
경사 하강법 전에는 반드시 모든 특성을 같은 스케일을 사용하여서 데이터 변환을 하여야 한다.
-
scikit learn(사이킷런) 라이브러리에서 각 특성에서 평균을 빼고 표준편차로 나누어 평균을 0 분산을 1로만드는 StandardScaler을 사용하곤 한다.
✔ 배치 경사 하강법
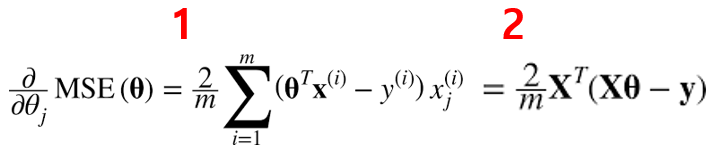
- 경사 하강법에서 각 모델의 θj에 대한 비용 함수의 partial derivative(편미분) 값을 1번 처럼 계산해야 한다.
- partial derivative를 각각 계산하는 대신 2번처럼 한번에 계산도 가능하다.
- 위 공식은 매 경사 하강 스텝에서 전체 훈련 세트에 대해 계산한다.
- 그래서 이 공식을 Batch Gradient Descent(배치 경사 하강법)이라고 한다.
- 전체 데이터를 다 사용하기 때문에 큰 훈련 세트에서는 아주 느리다.
- 🎈 장점으로는, 특성 수에 민감하지 않기 때문에 정규방정식보다 경사 하강법을 사용하는 것이 훨씬 빠르다.
- 위와 같이 그래디언트 벡터가 계산되면 학습률(alpha)에 그래디언트 벡터를 곱하고 이전 weight에 빼면 된다.
# 경사 하강법 구현(implementation) import numpy as np x = 2 * np.random.rand(100,1) # 100 x 1 크기의 0~1의 균일분포 x_b = np.c_[np.ones((100,1)),x] # bias(1)를 전체 데이터에 추가 y = 4 + 3*np.random.randn(100,1) # 100 x 1 크기의 표준정규분포 추출 learning_rate = 0.001 iterations = 1000 m = x_b.shape[0] # 100개 (x 데이터) theta = np.random.randn(2,1) # 2x1 크기의 평균 0, 분산1 정규 분포 추출 for iteration in range(iterations): gradients = 2/m * x_b.T.dot(x_b.dot(theta)-y) theta = theta - (learning_rate * gradients) # 정규방정식으로 찾은 것과 정확히 일치한다. theta > array([[ 4.93296992], [-0.41991499]])
✔ 확률적 경사 하강법
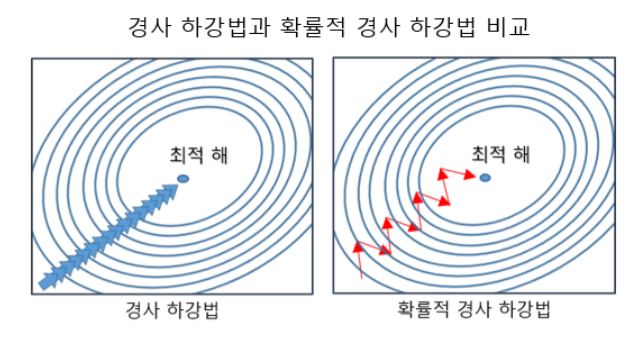
- 앞서, 배치 경사 하강법에서 언급한대로 매 스텝에서 전체 훈련 세트를 사용해서 그래디언트를 계산해야 하는 큰 문제가 있다.
- 이러한 문제를 극복하기 위해, 확률적 경사 하강법은 매 스텝마다 한 개의 샘플을 무작위로 선택 및 그 샘플에 대한 그래디언트를 계산한다.
- 매 반복에서 적은 양의 데이터로 그래디언트를 계산하고 업데이트 하기 때문에 최적화가 더 빠르다.
- 그리고 전체 데이터에서 샘플을 추출해서 최적화 시키기 때문에 매우 큰 훈련 데이터 역시 처리할 수 있다.
- 하지만 무작위 추출이기 때문에, 전체 데이터를 사용하는 것 보다 안정적이지는 못하다.
- 위 그림과 같이 비용 함수의 global minumum에 도달하기 까지 요동치며 평균적으로 감소한다.
- 요동치면서 최적의 해에 가까워지기는 하겠지만, 최소값에 도달하지 않을 수도 있다.
- 하지만 비용 함수가 MSE처럼 convex(볼록 함수)하지 않고 불균형하다면 배치 경사 하강법보다 global minimum에 도달할 가능성이 높다.
- 무작위성으로 인한 global minimum에 도달하지 않을 수 있다는 단점을 극복하기 위해서, 학습률을 점진적으로 감소시키는 해결책이 있다.(시작: 학습률 크게 => 진행단계: 학슬률 작게)
- 위 해결책을 위한 매 반복 학습률 결정 함수를 learning schedule(학습 스케쥴)이라고 부른다.
# 확률적 경사 하강법 구현(implementation) epochs = 1000 t0,t1 = 5,50 # 학습 스케쥴 (하이퍼 파라미터) m = x_b.shape[0] # 100개 (x 데이터) def learning_schedule(t): return t0 / (t+t1) theta = np.random.randn(2,1) # 2x1 크기의 평균 0, 분산1 정규 분포 추출 for epoch in range(epochs): for i in range(m): random_index = np.random.randint(m) # 0 ~ m-1까지 랜덤 숫자 1 xi = x_b[random_index:random_index:+1] # 1 x 2 크기 yi = y[random_index:random_index+1] # 1 x 1 크기 gradients = 2 * xi.T.dot(xi.dot(theta)-yi) # 1 => mini_m learning_rate = learning_schedule(epoch*m + i) theta = theta - learning_rate * gradients
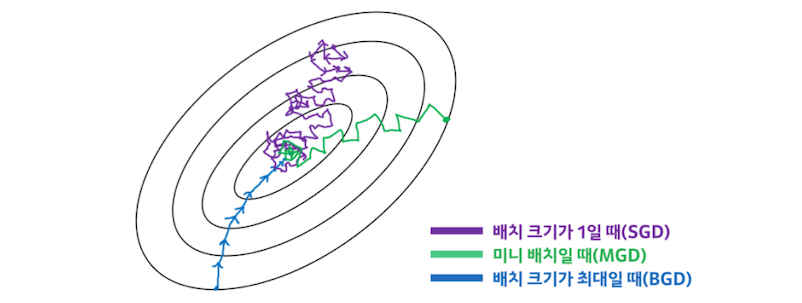
✔ 미니배치 경사 하강법
- 미니배치는 위 배치와 확률적 경사 하강법을 안다면 이해하기 쉽습니다.
- 각 Step에서 전체 훈련 세트를 일일이 다 학습하는 배치 경사 하강법이나 훈련 세트의 하나의 샘플을 통해서 학습하는 확률적 경사 하강법과 같이 그래디언트를 계산하는게 아니라, Mini Batch라 부르는 임의의 작은 샘플 세트에 대해 그래디언트를 계산하는 것이다.
- 확률적 경사 하강법에 비해 행렬 연산에 최적화된 GPU를 사용해서 성능을 더 올릴 수 있다.
- 미니 배치가 큰 경우, 파라미터 공간에서 SGD(확률적 경사 하강법)보다 덜 불규칙하게 움직인다.
- 곧, SGD보다 최소값에 도달할 수 있는 가능성이 더 높지만, Local Minimum(국소값)에 빠질 위험은 존재한다.
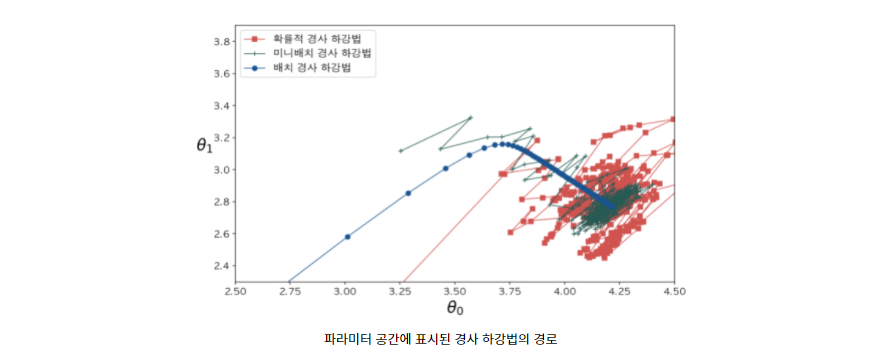
- 위 그림은 국소값이 많고 문제가 되는 파라미터 공간에서 배치, 미니배치, 확률적 경사 하강법을 비교한 그림이다.
- 모두 최소값에 도달하였지만, 배치 경사 하강법이 실제 최소값에서 도달하였고, 나머지 두 방법은 근처를 맴돌고 있다.
- 배치 경사 하강법이 최소값에 도달할 수는 있지만, 매 스텝에서 많은 시간과 비용이 든다.
- 확률적 경사 하강법과 미니 배치는 적절히 학습 스케쥴을 사용한다면 최소값에 마찬가지로 도달 할 수 있다.
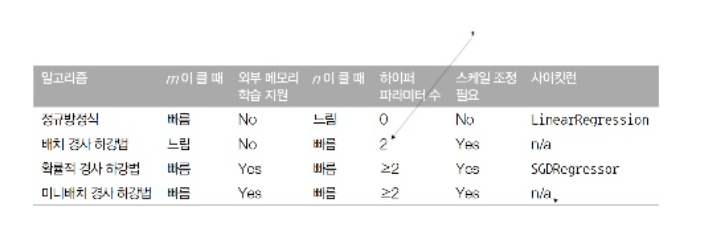
사이킷런의 SGDRegressor와 SGDClassifier에서 partial_fit 메서드를 사용하여 모델 파라미터를 초기화하지 않고 미니배치 학습을 위해 반복적으로 호출할 수 있다. 하지만 partial_fit 메서드는 fit 메서드와 동일하게 미니배치의 샘플을 하나씩 적용하므로 엄밀히 말하면 미니배치 경사 하강법 알고리즘은 아니다. - 핸즈온 머신러닝 -
- 다항 회귀
- 비선형성을 띄는 데이터도 선형 모델을 활용하여서 학습시킬 수 있다.
- 기존 특성에다가 log, exp, 제곱 등과 같은 basis function을 적용하여, 확장된 특성을 포함한 형태로 변형한 뒤 학습시키는 것을 다항 회귀 기법이라고 한다.
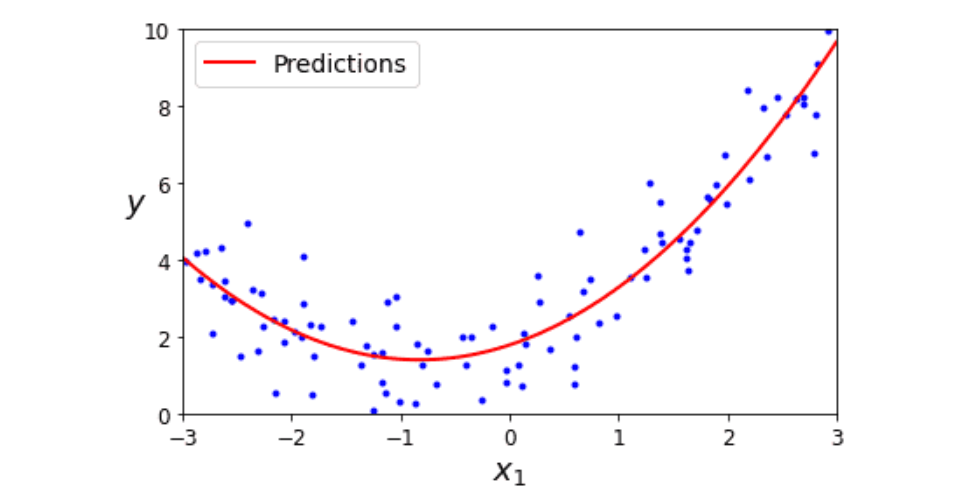
- 위와 같은 예시를 2차 방정식으로 간단하게 들어 보겠다.
import numpy as np data_num = 1000 x = 3 * np.random.rand(data_num,1) - 1 y = 0.2 * (x**2) + np.random.randn(1000,1) from sklearn.preprocessing import PolynomialFeatures poly_features = PolynomialFeatures(degree=2,include_bias=False) x_poly = poly_features.fit_transform(x) print(x[0]) print(x_poly[0]) >[0.35316774] >[0.35316774 0.12472745] from sklearn.linear_model import LinearRegression lin_reg = LinearRegression() lin_reg.fit(x_poly,y) print(lin_reg.intercept_,lin_reg.coef_) >[-0.0427474] [[-0.05998741 0.25104612]]
-
예측 모델의 식은 y_hat = 0.25x^2 - 0.05x^1 + 1 이다. 실제 원래 홤수와 거의 비슷해졌다.
-
특성이 여러 개 일 때 다항 회귀는 이 특성 사이의 관계를 찾을 수 있습니다.(PolynomialFeatures를 통해서 주어진 차수까지 특성 간의 모든 교차항을 추가할 수 있기 때문)
-
훈련 세트와 검증 세트의 모델 성능을 살펴 보는 것, (모델 과적합을 가시적으로 확인 하는 법)
from sklearn.metrics import mean_squared_error from sklearn.model_selection import train_test_split import matplotlib.pyplot as plt def plot_learning_curves(model,x,y): x_train,x_val,y_train,y_val = train_test_split(x,y,test_size=0.2) train_errors,val_errors = [],[] for num in range(1,len(x_train)): model.fit(x_train[:num],y_train[:num]) y_train_predict = model.predict(x_train[:num]) y_val_predict = model.predict(x_val) train_errors.append(mean_squared_error(y_train[:num],y_train_predict)) val_errors.append(mean_squared_error(y_val,y_val_predict)) plt.plot(np.sqrt(train_errors),'r-+',linewidth=2,label='train_set') plt.plot(np.sqrt(val_errors),'b-',linewidth=3,label='val_set') plt.legend() plt.show()
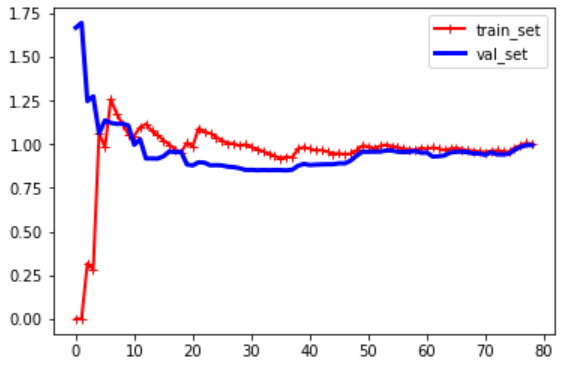
- basis function(4차 다항식)과 모델을 파이프라인을 거쳐서 바로 모델링 및 평가하는 법
from sklearn.pipeline import Pipeline data_num = 100 x = 3 * np.random.rand(data_num,1) - 1 y = 0.2 * x**2 + np.random.randn(100,1) polynomial_regression = Pipeline([ ("poly_features",PolynomialFeatures(degree=4,include_bias=False)), ("lin_reg",LinearRegression()) ]) plot_learning_curves(polynomial_regression,x,y)
- 규제가 있는 선형 모델
- 앞에서도 보았듯이 과대적합을 감소시키는 것이 아주 중요하고, 그 과대적합을 줄일 수 있는 방법을 강구해야 한다.
- 그 방법 중 loss에 새로운 term을 추가하여서 모델 weight에 대한 규제를 가하는 것이다.
- Lasso Regression (라쏘 회귀)
- Lasso(라쏘)회귀는 선형 회귀의 규제된 버전이다.
- 비용 함수에 L1 term(가중치에 절대값을 적용한 형태)을 사용하여서 weight에 규제를 한다.

from sklearn.linear_model import Lasso lasso_reg = Lasso(alpha=0.1) lasso_reg.fit(x,y) lasso_reg.predict([[1.5]]) >array([0.22365566])
- Ridge Regression (릿지 회귀)
- Ridge(릿지)회귀는 선형 회귀의 규제된 버전이다.
- 비용 함수에 L2 term(가중치에 제곱을 한 형태)을 사용하여 weight에 규제를 한다.

# 안드레 루이 숄레스키가 발견한 행렬 분해(matrix factorization) 사용 # 숄레스키 분해의 장점은 성능이다. 원래 ridge의 solver default값은 'auto'이며 희소 행렬이나 특이 행렬이 아니면 'cholesky'가 된다. from sklearn.linear_model import Ridge ridge_reg = Ridge(alpha=0.1,solver='cholesky') ridge_reg.fit(x,y) ridge_reg.predict([[1.5]]) >array([[0.29217567]])
- Elastic Net Regression (엘라스틱넷 회귀)
- Elastic Net(엘라스틱넷)은 릿지 회귀와 라쏘 회귀를 합성한 모델이다.
- 규제 term은 릿지회귀의 규제term과 단순히 더해서 사용하고, 혼합 비율 r을 조절해서 사용한다.
- r=0이면, 엘라스틱 넷은 => 릿지 회귀
- r=1이면, 엘라스틱 넷은 => 라쏘 회귀

from sklearn.linear_model import ElasticNet elastic_net = ElasticNet(alpha=0.1,l1_ratio=0.5) elastic_net.fit(x,y) elastic_net.predict([[1.5]]) >array([0.23234511])
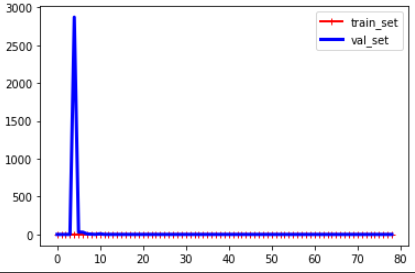
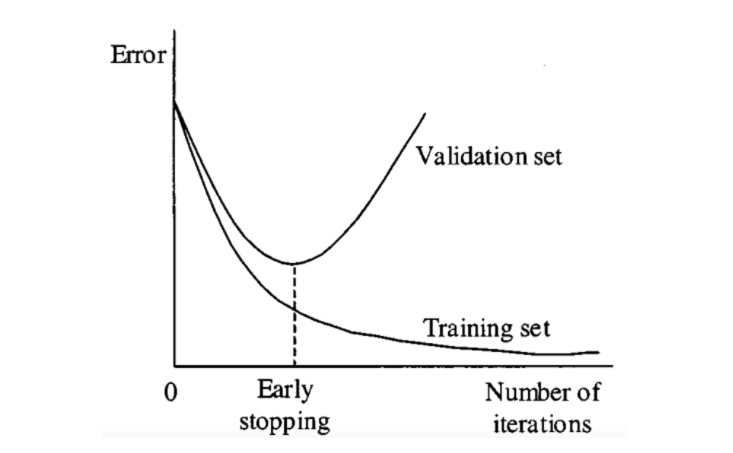
- Early Stopping (조기 종료)
- 경사 하강법과 같은 반복적인 학습 알고리즘을 규제하는 것은 실제 비용함수에 규제항을 추가하는 것 뿐만 아니라, 검증 에러가 훈련 에러에 비해 치솟게 되면 바로 훈련을 중지시키는 방법도 있다. 이를 early stopping이라 한다.
from sklearn.base import clone from sklearn.preprocessing import PolynomialFeatures,StandardScaler from sklearn.linear_model import SGDRegressor from sklearn.pipeline import Pipeline from sklearn.metrics import mean_squared_error x = 3 * np.random.rand(data_num,1) - 1 y = 0.2 * x**2 + np.random.randn(100,1) poly_scaler = Pipeline([ ("poly_features",PolynomialFeatures(degree=90,include_bias=False)), ('std_scaler',StandardScaler()) ]) x_train,x_val,y_train,y_val = train_test_split(x,y,test_size=0.2) x_train_poly_scaled = poly_scaler.fit_transform(x_train) x_val_poly_scaled = poly_scaler.transform(x_val) # warm_start=True 이면 fit 메서드가 호출될 때 처음부터 다시 하지 않고 이전 모델 파라미터에서 훈련 이어짐 # penalty : {‘l2’, ‘l1’, ‘elasticnet’}, default=’l2’ # n_iter_no_change : Number of iterations with no improvement to wait before stopping fitting # 'constant' : eta = eta0 # 'optimal' : eta = 1.0 / (alpha * (t + t0)) # 'invscaling' : eta = eta0 / pow(t, power_t) # 'adaptive' : eta = eta0, as long as the training keeps decreasing sgd_reg = SGDRegressor(n_iter_no_change=1,warm_start=True,penalty=None, learning_rate='constant',eta0=0.0005) SGDRegressor() minimum_val_error = float('inf') best_epoch = None best_model = None for epoch in range(1000): sgd_reg.fit(x_train_poly_scaled,y_train.ravel()) y_val_predict = sgd_reg.predict(x_val_poly_scaled) val_error = mean_squared_error(y_val,y_val_predict) if val_error<minimum_val_error: minimum_val_error = val_error best_epoch = epoch best_model = clone(sgd_reg) print('best_epoch : ',best_epoch) print('best_model : ',best_model)
오늘 배운 내용들은 뒤에서도 계속해서 반복되면서, 앞으로 모든 머신러닝의 원리에 적용되는 부분이니 잘 이해해두면 좋을 것이고, 오늘 긴 이 내용을 본 당신은 머신러닝의 첫 발을 내딛은 것이다.
