지난 포스팅(LesNet-5)에 이어서 AlexNet model로 image classification을 진행해보고자 한다. 데이터와 진행 절차는 동일하며, 모델만 갈아 끼웠다고 생각하면 된다.
👀 AlexNet
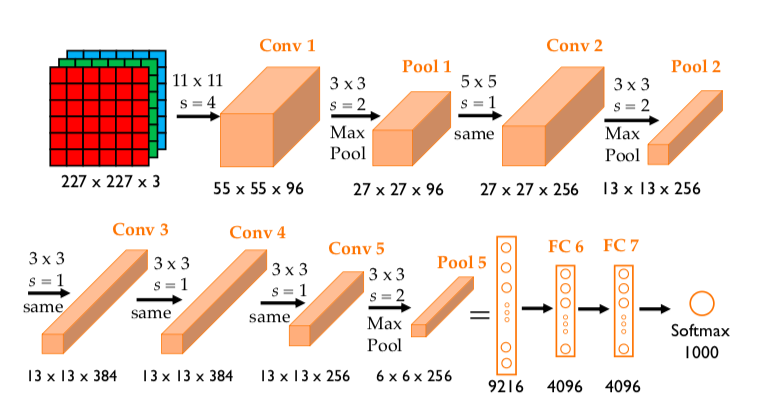
합성곱 층 총 5개와 완전연결층 3개로 구성되어 있으며,
마지막 완결연결층은 카테고리 1000개를 분류하기 위한 소프트맥스 활성화 함수를 사용하고 있다.
| 계층 유형 | 특성 맵 | 크기 | 커널 크기 | 스트라이드 | 활성화 함수 |
|---|---|---|---|---|---|
| 이미지 | 1 | 227X227 | - | - | - |
| 합성곱층 | 96 | 55X55 | 11X11 | 4 | ReLU |
| 최대 풀링층 | 96 | 27X27 | 3X3 | 2 | - |
| 합성곱층 | 256 | 27X27 | 5X5 | 1 | ReLU |
| 최대 풀링층 | 256 | 13X13 | 3X3 | 2 | - |
| 합성곱층 | 384 | 13X13 | 3X3 | 1 | ReLU |
| 합성곱층 | 384 | 13X13 | 3X3 | 1 | ReLU |
| 합성곱층 | 256 | 13X13 | 3X3 | 1 | ReLU |
| 최대 풀링층 | 256 | 6X6 | 3X3 | 2 | - |
| 완전연결층 | - | 4096 | - | - | ReLU |
| 완전연결층 | - | 4096 | - | - | ReLU |
| 완전연결층 | - | 1000 | - | - | Softmax |
네트워크에는 학습 가능한 변수가 6600만개 있다.
네트워크에 대한 입력은 227X227X3 크기의 RGB 이미지이며, 각 클래스(카테고리)에 해당하는 1000X1 확률벡터를 출력한다.
그러면 AlexNet를 활용한 개, 고양이 이미지 분류를 수행해 보자.
Image classification with AlexNet
# import library
import torch
import torchvision
from torch.utils.data import DataLoader, Dataset
from torchvision import transforms
from torch.autograd import Variable
from torch import optim
import torch.nn as nn
import torch.nn.functional as F
import os
import cv2
import random
import time
from PIL import Image
from tqdm import tqdm_notebook as tqdm
import matplotlib.pyplot as plt
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')# data preprocessing
class ImageTransform() :
def __init__(self, resize, mean, std) :
self.data_transform = {
'train' : transforms.Compose([
transforms.RandomResizedCrop(resize, scale=(0.5, 1.0)),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize(mean, std)
]),
'val' : transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(resize),
transforms.ToTensor(),
transforms.Normalize(mean, std)
])
}
def __call__(self, img, phase) :
return self.data_transform[phase](img)# data load & split
cat_dir = '../080289-main/chap06/data/dogs-vs-cats/Cat/'
dog_dir = '../080289-main/chap06/data/dogs-vs-cats/Dog/'
cat_images_filepath = sorted([os.path.join(cat_dir, f) for f in os.listdir(cat_dir)])
dog_images_filepath = sorted([os.path.join(dog_dir, f) for f in os.listdir(dog_dir)])
images_filepath = [*cat_images_filepath, *dog_images_filepath]
correct_images_filepath = [i for i in images_filepath if cv2.imread(i) is not None]
random.seed(3)
random.shuffle(correct_images_filepath)
train_image_filepaths = correct_images_filepath[:400]
val_image_filepaths = correct_images_filepath[400:-10]
test_image_filepaths = correct_images_filepath[-10:]
print(len(train_image_filepaths), len(val_image_filepaths), len(test_image_filepaths))# define custom dataset
class DogvsCatDataset(Dataset) :
def __init__(self, file_list, transform=None, phase='train') :
self.file_list = file_list
self.transform = transform
self.phase = phase
def __len__(self) :
return len(self.file_list)
def __getitem__(self, idx) :
img_path = self.file_list[idx]
img = Image.open(img_path)
img_transformed = self.transform(img, self.phase)
label = img_path.split('/')[-1].split('.')[0]
if label == 'dog' :
label = 1
elif label == 'cat' :
label = 0
return img_transformed, label# define variables
size = 256
mean = (0.485, 0.456, 0.406)
std = (0.229, 0.224, 0.225)
batch_size = 32train_dataset = DogvsCatDataset(train_image_filepaths, transform=ImageTransform(size, mean, std),
phase='train')
val_dataset = DogvsCatDataset(val_image_filepaths, transform=ImageTransform(size, mean, std),
phase='val')
test_dataset = DogvsCatDataset(val_image_filepaths, transform=ImageTransform(size, mean, std),
phase='val')
index = 0
print(train_dataset.__getitem__(index)[0].size())
print(train_dataset.__getitem__(index)[1])# load dataset to memory
train_dataloader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
val_dataloader = DataLoader(val_dataset, batch_size=batch_size, shuffle=False)
test_dataloader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
dataloader_dict = {'train' : train_dataloader, 'val' : val_dataloader}
batch_iterator = iter(train_dataloader)
inputs, label = next(batch_iterator)
print(inputs.size())
print(label)# define model network
class AlexNet(nn.Module) :
def __init__(self) -> None :
super(AlexNet, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=11, stride=4, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(64, 192, kernel_size=5, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(192, 384, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(384, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
)
self.avgpool = nn.AdaptiveAvgPool2d((6, 6))
self.classifier = nn.Sequential(
nn.Dropout(),
nn.Linear(256*6*6, 4096),
nn.ReLU(inplace=True),
nn.Dropout(),
nn.Linear(4096, 512),
nn.ReLU(inplace=True),
nn.Linear(512, 2),)
def forward(self, x :torch.Tensor) -> torch.Tensor :
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x# create model
model = AlexNet()
model.to(device)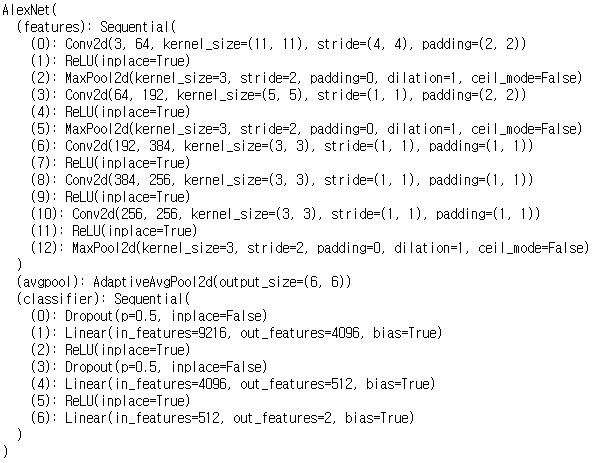
# optimizer, loss function
optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
criterion = nn.CrossEntropyLoss()# check model Network
from torchsummary import summary
summary(model, input_size=(3, 256, 256))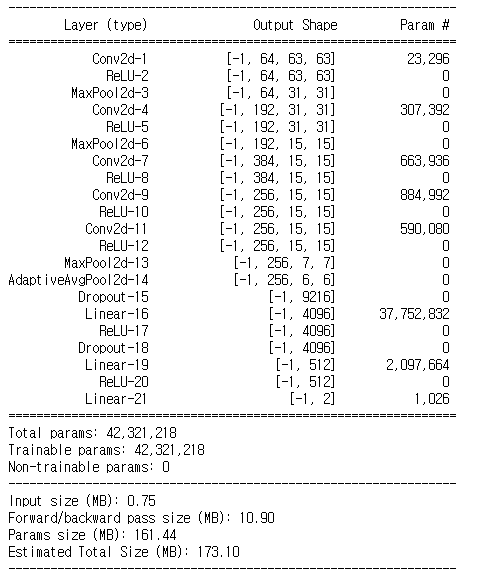
# define training function
def train_model(model, dataloader_dict, criterion, optimizer, n_epochs) :
since = time.time()
best_acc = 0.0
for epoch in range(n_epochs) :
print(f'Epoch {epoch+1}/{n_epochs}')
print('-' * 20)
for phase in ['train', 'val'] :
if phase == 'train' :
model.train()
else :
model.eval()
epoch_loss = 0.0
epoch_corrects = 0
for inputs, labels in tqdm(dataloader_dict[phase]) :
inputs = inputs.to(device)
labels = labels.to(device)
optimizer.zero_grad()
with torch.set_grad_enabled(phase == 'train') :
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
loss = criterion(outputs, labels)
if phase == 'train' :
loss.backward()
optimizer.step()
epoch_loss += loss.item() * inputs.size(0)
epoch_corrects += torch.sum(preds == labels.data)
epoch_loss = epoch_loss / len(dataloader_dict[phase].dataset)
epoch_acc = epoch_corrects.double() / len(dataloader_dict[phase].dataset)
print(f'{phase} Loss : {epoch_loss:.4f} Acc : {epoch_acc:.4f}')
time_elapsed = time.time() - since
print(f'Training complete in {time_elapsed // 60:.0f}m {time_elapsed %60:0f}')
return modeln_epochs = 10
model = train_model(model, dataloader_dict, criterion, optimizer, n_epochs)# make prediction
import pandas as pd
id_list = []
pred_list = []
_id = 0
with torch.no_grad() :
for test_path in tqdm(test_image_filepaths) :
img = Image.open(test_path)
_id = test_path.split('/')[-1].split('.')[1]
transform = ImageTransform(size, mean, std)
img = transform(img, phase='val')
img = img.unsqueeze(0)
img = img.to(device)
model.eval()
outputs = model(img)
preds = F.softmax(outputs, dim=1)[:, 1].tolist()
id_list.append(_id)
pred_list.append(preds[0])
res = pd.DataFrame({'id' : id_list,
'label' : pred_list})
res.to_csv('./alexnet.csv', index=False)# result visualization
class_ = classes = {0 : 'cat', 1 : 'dog'}
def display_image_grid(images_filepaths, pred_labels=(), cols=5) :
rows = len(images_filepaths) // cols
figure, ax = plt.subplots(nrows=rows, ncols=cols, figsize=(12, 6))
for i, image_filepath in enumerate(images_filepaths) :
image = cv2.imread(image_filepath)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
a = random.choice(res['id'].values)
label = res.loc[res['id'] == a, 'label'].values[0]
if label > 0.5 :
label = 1
else :
label = 0
ax.ravel()[i].imshow(image)
ax.ravel()[i].set_title(class_[label])
ax.ravel()[i].set_axis_off()
plt.tight_layout()
plt.show()display_image_grid(test_image_filepaths)
📚 reference
- (길벗) 딥러닝 파이토치 교과서 / 서지영 지음
- github

AI에 대체되지 않는 인재가 되자