이전 포스팅에서는 핀홀 카메라를 기준으로 캘리브레이션을 수행했었는데, 화각이 넓은 어안 카메라(fisheye camera)의 경우 조금 다른 방식으로 intrinsic parameter를 구하게 된다.
opencv의 fisheye module에서 어안 카메라의 캘리브레이션 과정을 지원하고 있으며, 이 방식대로 캘리브레이션을 수행해 보겠다.
fisheye camera calibration
fisheye camera에서의 intrinsic parameters는 K와 D가 있다.
캘리브레이션(calibration)
본 캘리브레이션 과정에서도 약 20장 정도의 10 * 15 체커보드 이미지를 촬영하여 사용하였는데, 테두리 부분을 제외하고 CHECKERBOARD = (14, 9) 로 표시한다.
(처음에 15, 10 했다가 안되길래 한참 헤맸다.. 꼭 체크 개수 -1 씩 해줘야 함 !!!😖)
import cv2
assert cv2.__version__[0] == '3', 'The fisheye module requires opencv version >= 3.0.0'
import numpy as np
import os
import glob
CHECKERBOARD = (14,9)
subpix_criteria = (cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 0.1)
calibration_flags = cv2.fisheye.CALIB_RECOMPUTE_EXTRINSIC+
cv2.fisheye.CALIB_CHECK_COND+cv2.fisheye.CALIB_FIX_SKEW
objp = np.zeros((1, CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
_img_shape = None
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
images = glob.glob('./cali_images/*.jpg')
for fname in images:
img = cv2.imread(fname)
if _img_shape == None:
_img_shape = img.shape[:2]
else:
assert _img_shape == img.shape[:2], "All images must share the same size."
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# Find the chess board corners
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD,
cv2.CALIB_CB_ADAPTIVE_THRESH+cv2.CALIB_CB_FAST_CHECK+cv2.CALIB_CB_NORMALIZE_IMAGE)
if ret == True:
objpoints.append(objp)
cv2.cornerSubPix(gray,corners,(3,3),(-1,-1),subpix_criteria)
imgpoints.append(corners)
N_OK = len(objpoints)
K = np.zeros((3, 3))
D = np.zeros((4, 1))
rvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)]
tvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)]
rms, _, _, _, _ = \
cv2.fisheye.calibrate(
objpoints,
imgpoints,
gray.shape[::-1],
K,
D,
rvecs,
tvecs,
calibration_flags,
(cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 1e-6)
)
print("Found " + str(N_OK) + " valid images for calibration")
print("DIM=" + str(_img_shape[::-1]))
print("K=np.array(" + str(K.tolist()) + ")")
print("D=np.array(" + str(D.tolist()) + ")")왜곡 보정(undistort)
def undistort(image, balance=0.0, dim2=None, dim3=None):
dim1 = image.shape[:2][::-1]
assert dim1[0]/dim1[1] == DIM[0]/DIM[1],
if not dim2:
dim2 = dim1
if not dim3:
dim3 = dim1
scaled_K = K * dim1[0] / DIM[0]
scaled_K[2][2] = 1.0
new_K = cv2.fisheye.estimateNewCameraMatrixForUndistortRectify(scaled_K,
D,dim2, np.eye(3), balance=balance)
map1, map2 = cv2.fisheye.initUndistortRectifyMap(scaled_K, D,
np.eye(3), new_K,dim3, cv2.CV_16SC2)
undistorted_img = cv2.remap(image, map1, map2,
interpolation=cv2.INTER_LINEAR, borderMode=cv2.BORDER_CONSTANT)
cv2.imshow("undistorted", undistorted_img)
cv2.waitKey(0)
cv2.destroyAllWindows()calibration에서 검출된 파라미터들을 위에서 정의한 후, undistort 함수를 사용하면 왜곡이 보정된 이미지를 획득할 수 있다. 내가 테스트한 카메라의 파라미터는 다음과 같이 나왔다.
DIM=(1920, 1080)
K=np.array([[1041.721033566984, 0.0, 982.4318615455983], [0.0, 1041.0260709694585, 431.8071863472761], [0.0, 0.0, 1.0]])
D=np.array([[-0.07960228346280786], [0.4447533452768294], [-1.6226455570763598], [1.907617662076584]])
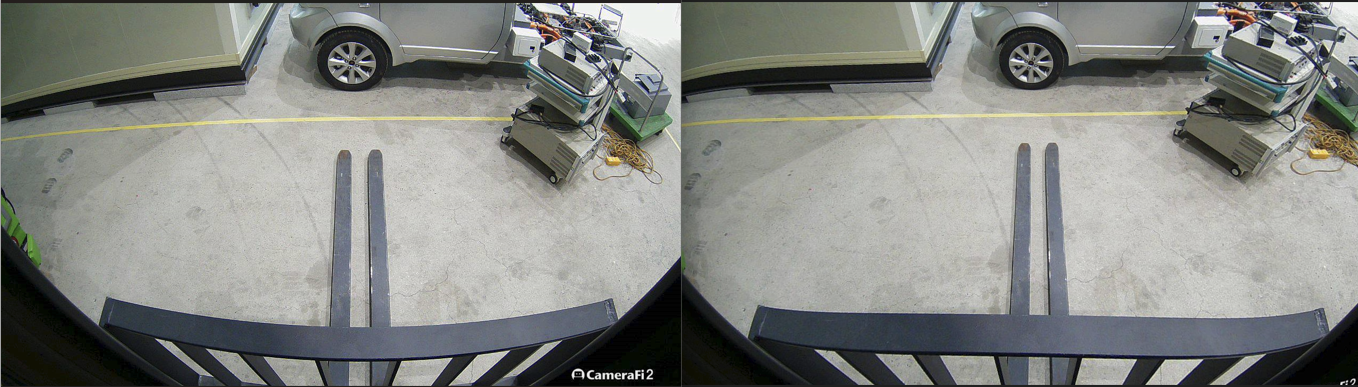
왼쪽이 보정 전, 보정 후의 이미지인데 노란 선 부분과 검은색 판의 곡선 부분이 많이 개선된 것을 볼 수 있다.

안녕 하세요 체커 보드 한변의 길이는 어디서 수정 하나요?? mm 참고하신 원문에서 제공하는 a4 사이즈 체커 보드가 다운로드 불가능하네요