Paper read
1.A Survey on Deep Learning for Localization and Mapping: Towards the Age of Spatial Machine Intelligence
AbstractIntroduction with learning-based (data-driven) localization and mapping. Revisit the problem of perceiving self-motion and scene understanding
2.SuperPoint: Self-Supervised Interest Point Detection and Description (CVPRW 2018)
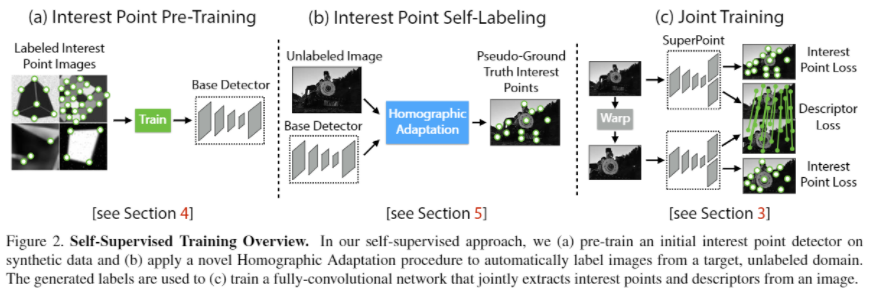
Homographic Adaptation을 제안하여 multi-scale에 대한 interest point detection을 잘해보겠다. 기존 Homography estimation의 모델의 수준을 능가하였다. Interest point: MVG에서 Image mat
3.DeepVO: Towards End-to-End Visual Odometry with Deep Recurrent Convolutional Neural Networks (ICRA 2017)
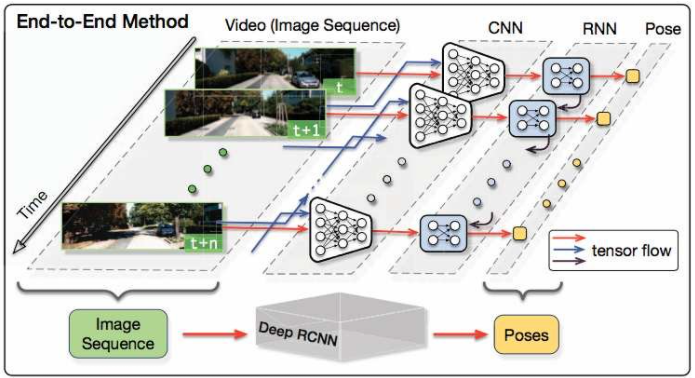
제기한 문제점: different environment에 잘 동작하기 위해서는 정교한 fine-tuning이 필요하다., monocular slam에서 absolute scale을 잘 복원하기 위해서는 prior knowledge가 필요하다.본 논문에서는 RCNN을 이
4.Unsupervised Learning of Depth and Ego-Motion from Video (CVPR 2017)
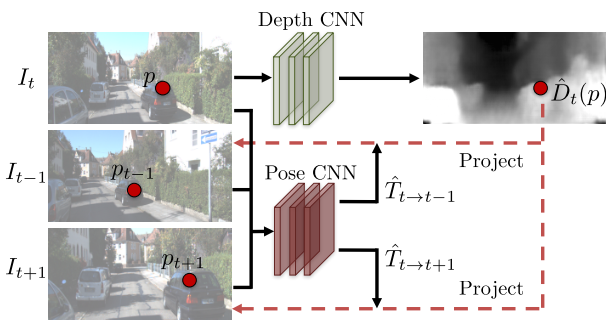
Depth라고 생각할 수 있는 출력값과 pose라고 생각할 수 있는 출력 벡터를 이용하여 아래 식을 통해 target의 주변 이미지 $I{t-1}$, $I{t+1}$을 warping하여 relocate하고, target 이미지($I_t$)를 복원하도록 학습할 수 있는
5.SuperGlue: Learning Feature Matching with Graph Neural Networks (CVPR 2020)
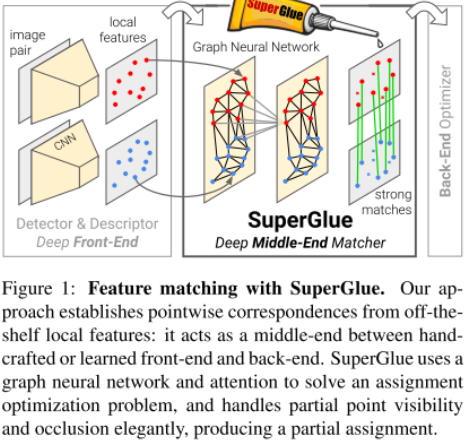
Task of matching two sets of local features.Solving differentiable optimal transport problem derived from graph neural network.introduce flexible cont
6.D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry (CVPR 2020)
Deep monocular visual odometry - Deep depth, pose and uncertainty estimation 3가지 를 이용해서 SLAM에 접목해보겠다.self-supervised learning trained on stereo videos
7.A Fourier Perspective on Model Robustness in Computer Vision (Neurlps 2019)
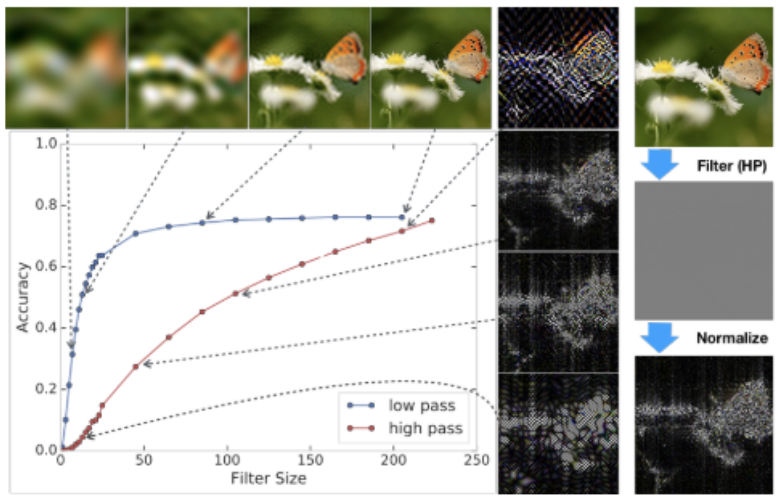
Data augmentation 방법에 trade-off가 존재 => Fourier 관점에서 해석=> A type에 대한 corruption에 대해 robustness를 늘려주면, B type에 대한 corruption에 대해 퍼포먼스가 감소=> 최근 Gaussian