[Photogrammetry] 7-2. Visual Feature Part1: Computing Keypoints
Photogrammetry (Cyrill Stachniss)
SIFT - 5 Minutes with Cyrill
SIFT(Scale Invariant Feature Transform)
: 이미지의 크기나 회전에 불변하는 특징을 추출하는 알고리즘
: 서로 다른 두 이미지에서 SIFT 특징을 각각 추출한 다음에 서로 가장 비슷한 특징끼리 매칭해주면 두 이미지에서 대응되는 부분을 찾을 수 있다는 것이 기본 원리
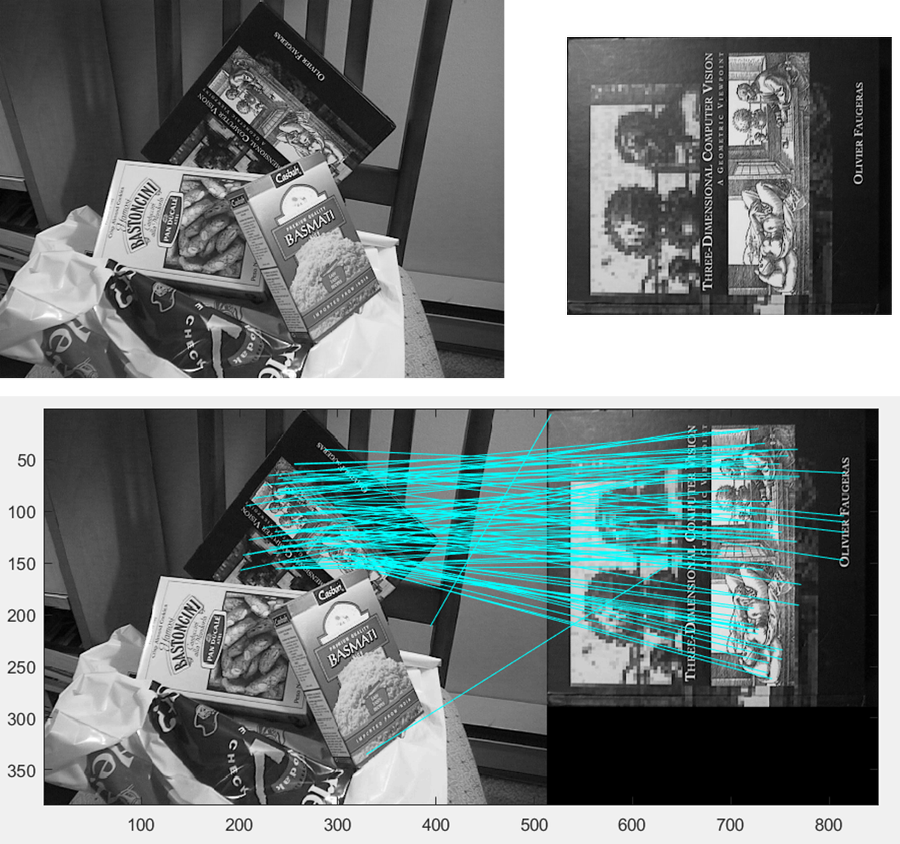 다음 그림과 같이 크기와 회전은 다르지만,
다음 그림과 같이 크기와 회전은 다르지만,
일치하는 내용을 갖고 이미지에서 동일한 물체를 찾아 매칭해줄 수 있는 알고리즘
이미지의 크기도 다르고, 책이 회전된 정도도 다르고, 물체들에 가려져 있는데도 불구하고 일치되는 부분을 잘 매칭해준 것을 확인 (occlusion)😄
⇒ SIFT의 장점
++NCC는 occlusion인 경우는 다루지 못했다.
Motivation
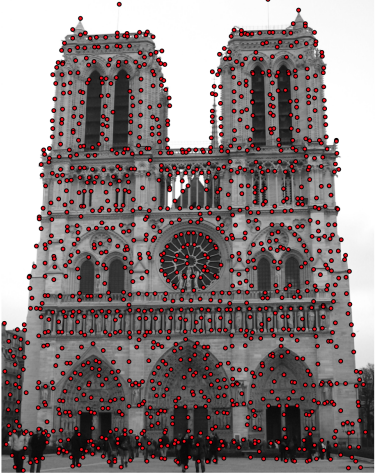 locally distinct한 point들을 표시한 사진
locally distinct한 point들을 표시한 사진
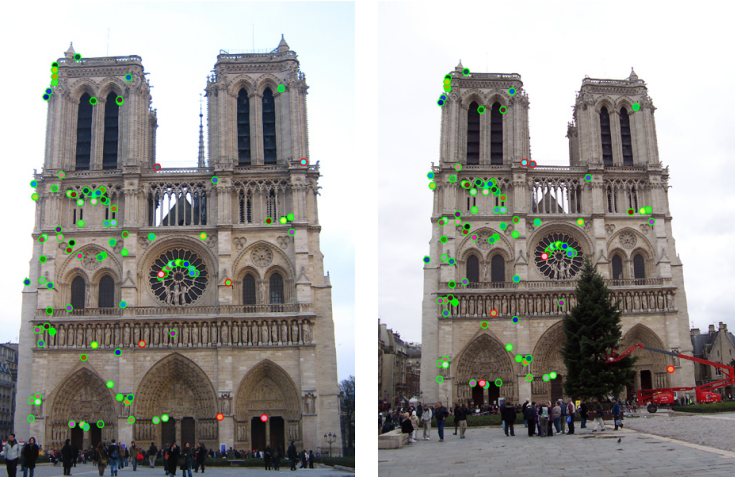 keypoint들을 표시한 사진(이미지의 크기나 회전에 불변하는 특징)
keypoint들을 표시한 사진(이미지의 크기나 회전에 불변하는 특징)
Visual Features: KeyPoints and Descriptors
Keypoint
: (locally) distinct location in an image
: noise, 회전, 크기변환, 밝기변환에 강인한 point
: 이 조건에 맞는 특징점 중 하나를 코너점이라고 얘기할 수 있음코너점이란?
상하좌우로 움직였을 때, 모두 큰 변화가 일어나는 곳
Descriptors
: keypoint를 설명하는 방식 - 128개의 숫자
: keypoint 주변의 local structure 요약
하나의 keypoint는 다음과 같은 하나의 vector = descriptor로 표현될 수 있음
Today’s Topics
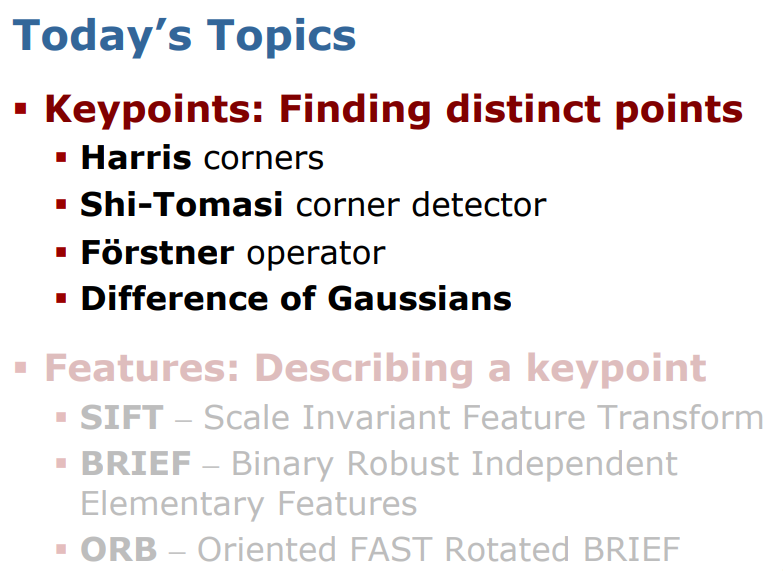
Keypoints : Part 1 _ Corners
Corners & Edges
- corners는 translation, rotation, illumination에 불변함
corner
: roughly orthogonal directions(직교방향)의 2개의 edgesedges
: sudden brightness change
ex. bright→dark, dark→bright
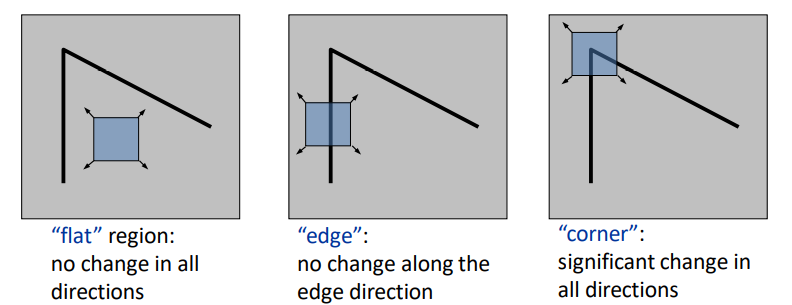
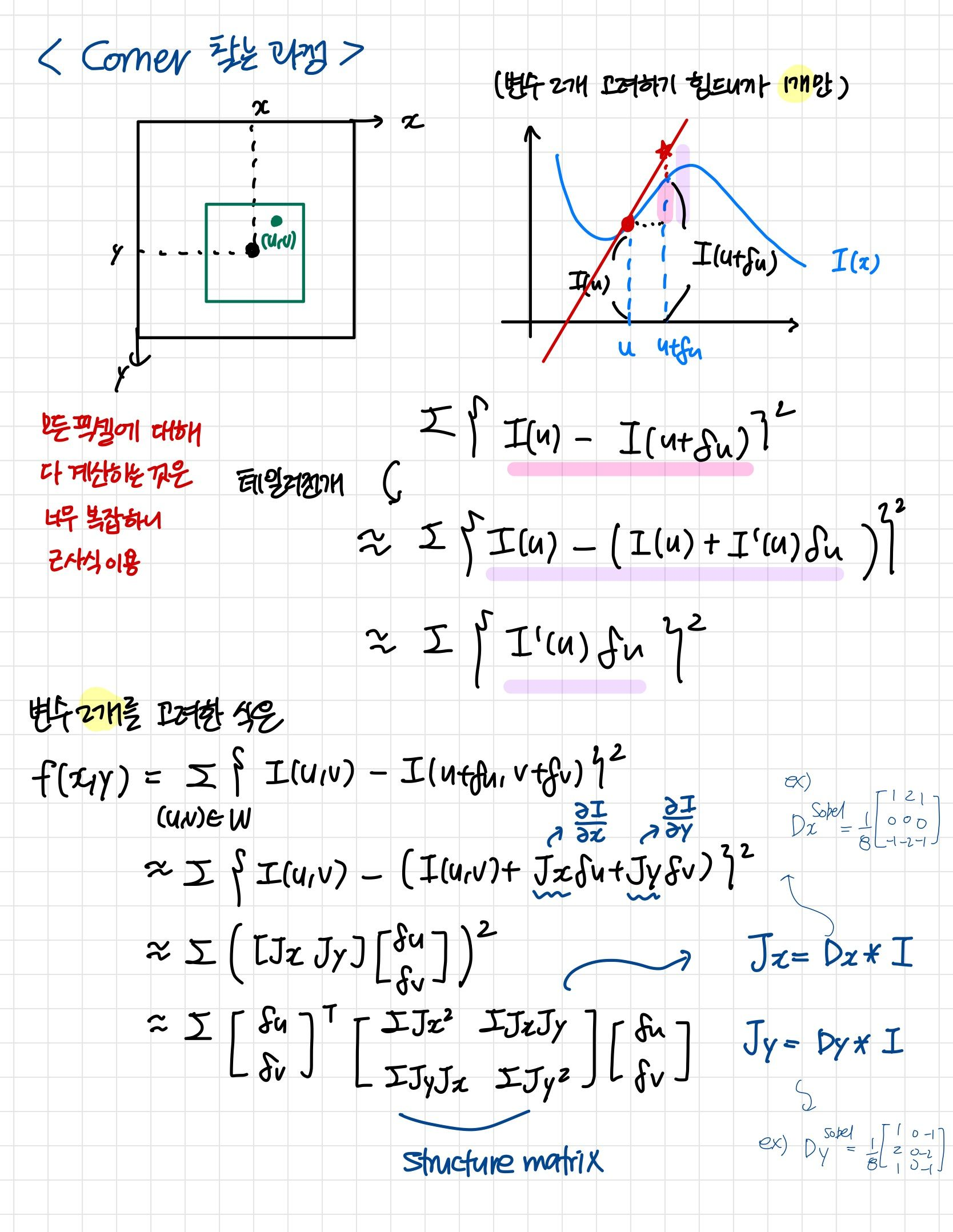
Finding Corners
- corners 찾기 위해서, 우리는 two directions에서 intensity changes를 찾아야 함
- 주변의 neighbor pixel의 SSD를 계산하기
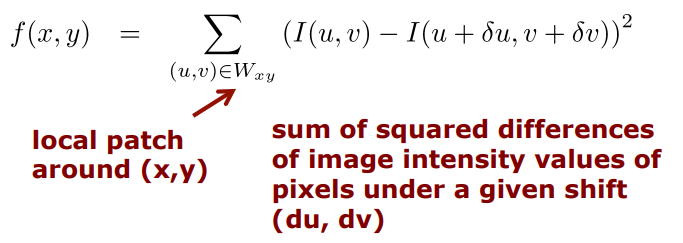 새롭게 옮겨진 위치에서의 값과 원래 위치에서의 값의 차를 구한 후 제곱한 식이다. (값이 클수록 변화가 크다는 것)
새롭게 옮겨진 위치에서의 값과 원래 위치에서의 값의 차를 구한 후 제곱한 식이다. (값이 클수록 변화가 크다는 것)
Talyor expansion
하지만,, 모든 픽셀을 계산하는 것은 좋지 못한 방법 ㅠ.ㅠ 따라서 제안된 것이 Talyor expansion
Talyor expansion
: 어떤 함수 f(x)를 다항함수로 근사시키는 것
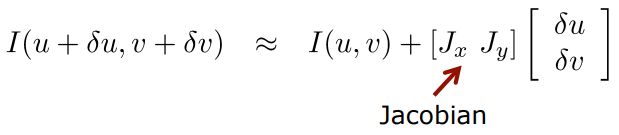 Taylor approximation은 다음과 같은데..
Taylor approximation은 다음과 같은데..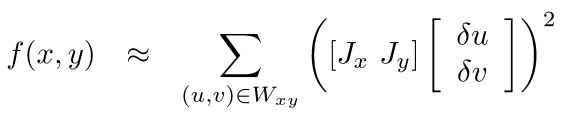 matrix form으로 쓰면
matrix form으로 쓰면 sum의 기호를 matrix 안으로 쓰면
sum의 기호를 matrix 안으로 쓰면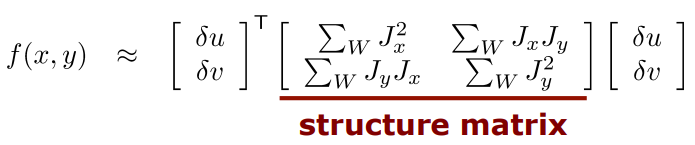
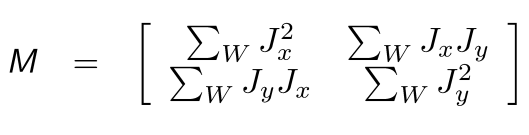
Structure Matrix
Structure Matrix
: first derivative에 대한 모든 정보를 담고 있는 가장 중요한 식이겠지!
- edges와 corners를 찾아내는 key와 같은 역할
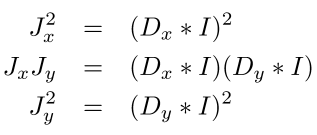
- image gradients로부터 만들어짐
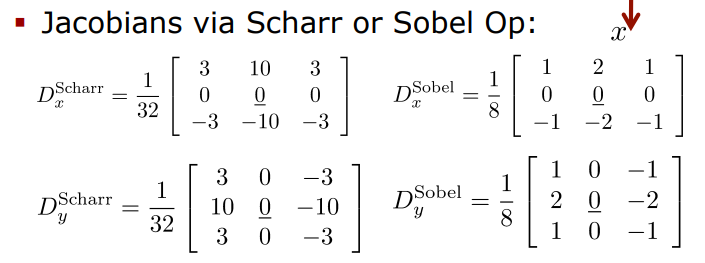
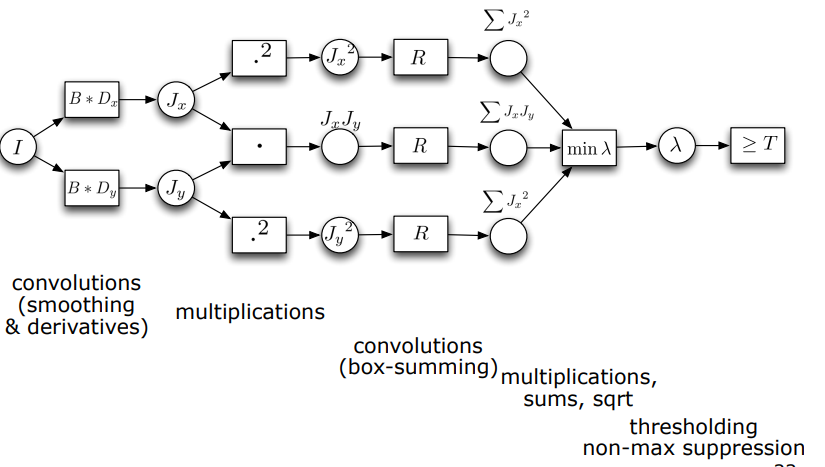
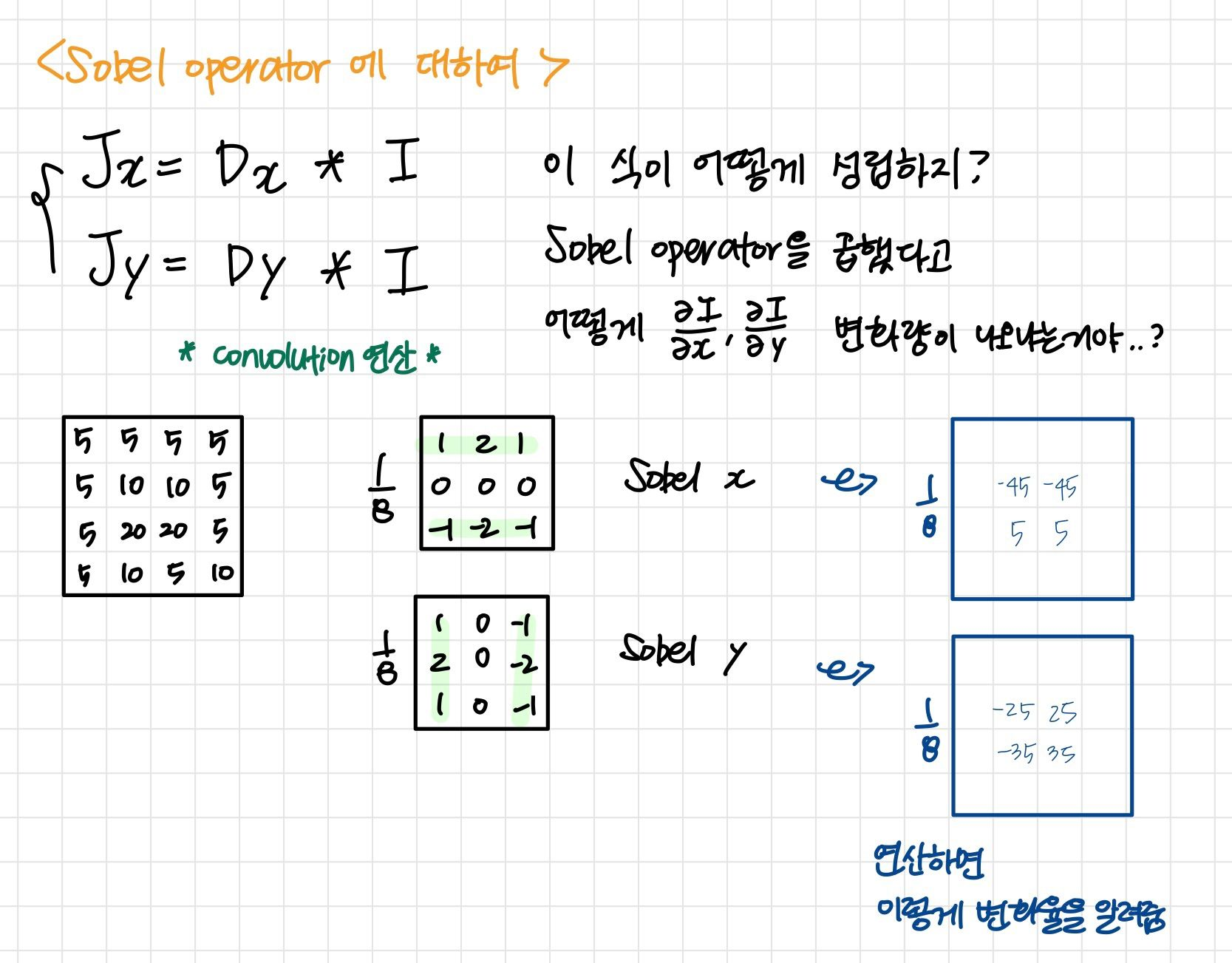
Computing the Structure Matrix
- Jacobians는 Scharr 또는 Sobel과 같은 gradient kernel를 이용하여 convolution으로 계산됨
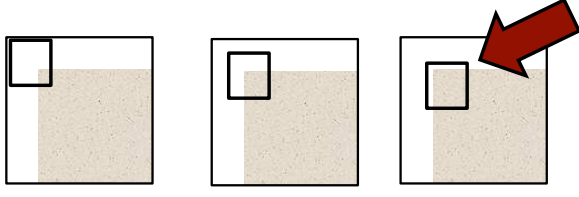
Structure Matrix Examples
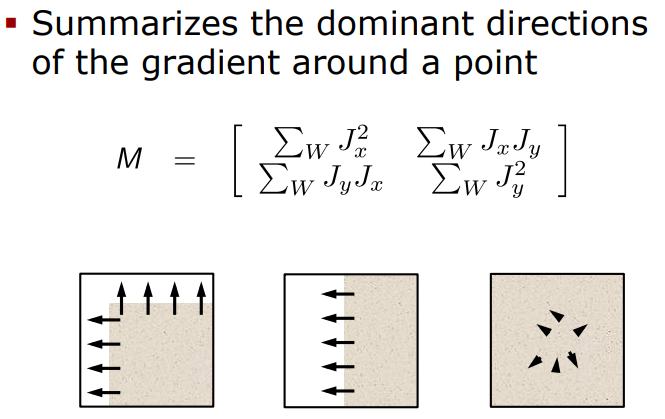
- 첫번째 사진: gradient가 X방향과 Y방향 모두 있기 때문에 가장 good
- 두번째 사진: gradient가 한 방향밖에 없기 때문에 별로 좋지 않음
(가로 방향으로는 localize할 수 있지만, 세로 방향으로는 할 수 없으므로) - 세번째 사진: intensity value 차이가 없기 때문에 제일 bad - local structure을 많이 갖지 않음
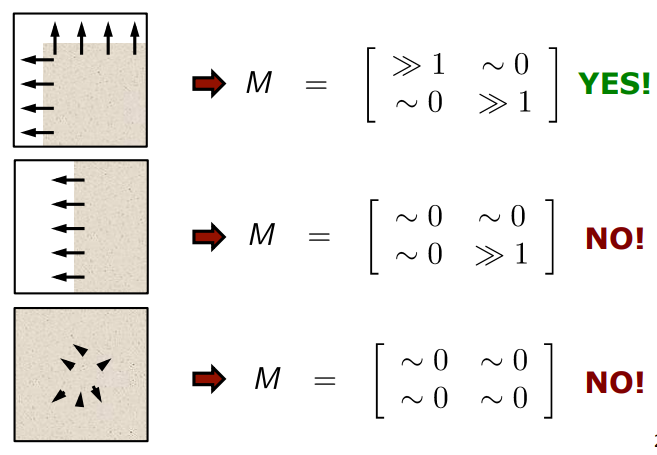 locally distinct라는 것의 정의는 첫번째만 !
locally distinct라는 것의 정의는 첫번째만 !KEY IDEA
structure matrix가 2개의 large eigenvalue(고유값)을 가질 때에만 !
points를 corners라고 생각하라.
Harris, Shi-Tomasi & Forstner
corner을 정의하기 위한 3개의 비슷한 연구들이 있었음
- 1987: Forstner
- 1988: Harris
- 1994: Shi-Tomasi
모든 연구는 structure matrix를 기반으로 point가 corner인지 아닌지 결정할 때 서로 다른 기준(criterion) 사용
Fostner은 subpixel estimation 방법을 사용
1. Harris Corner Criterion
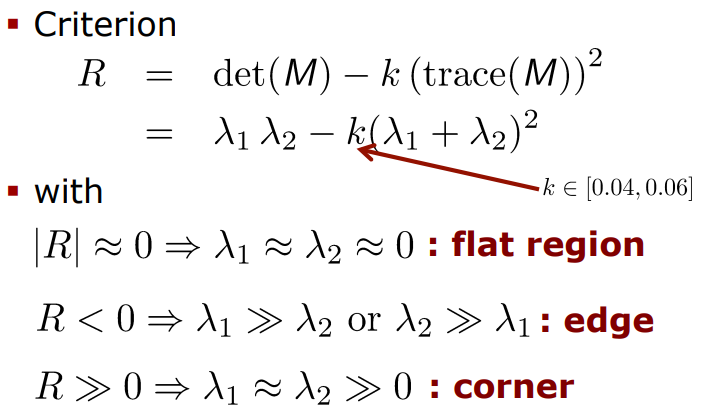 : 고윳값(eigenvalue)를 의미함
: 고윳값(eigenvalue)를 의미함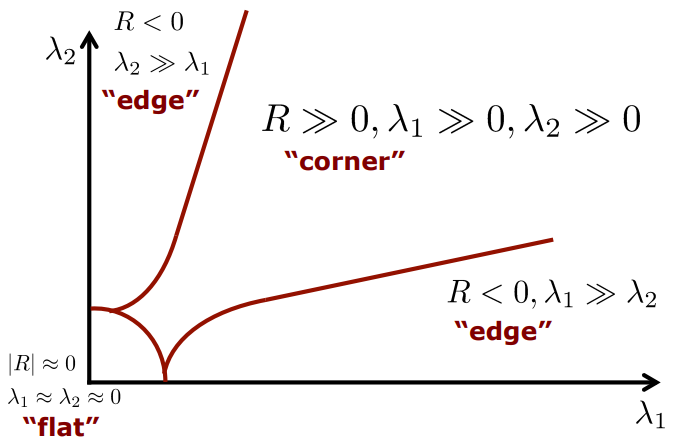
2. Shi-Tomasi Corner Detector
대부분의 libraries는 Shi-Tomasi를 default corner detector로 사용한다. (e.g. openCV)
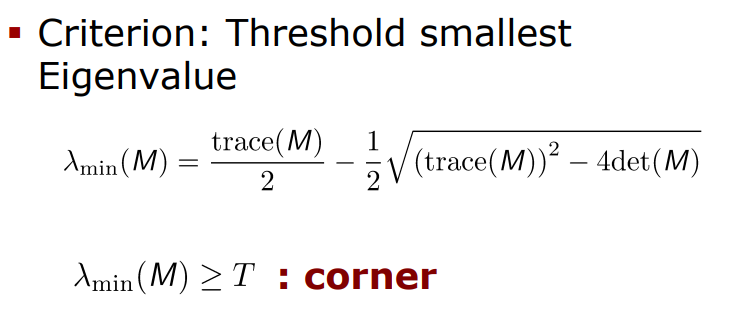 기준점이 될 가장 작은 eigenvalue값을 구함
기준점이 될 가장 작은 eigenvalue값을 구함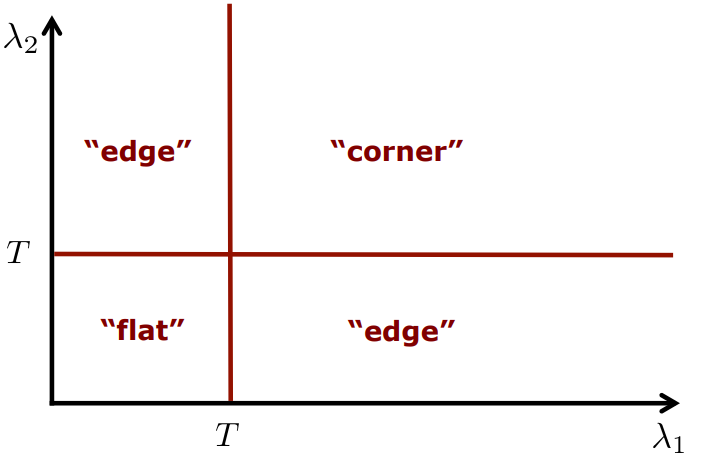
3. Forstner Operator Criterion
Harris corner dector 방법과 매우 비슷
sub-pixel estimation의 확장
Non-Maxima Supression
local region 안에서, maximum value( or )로 position을 찾고 이 point를 선택함
 3개의 그림 중에 무엇이 가장 best일까?
3개의 그림 중에 무엇이 가장 best일까?
3번째 사진!
number of gradients가 더 크기 때문에
Summary Corner Detection
 여기서는 Shi-Tomasi를 사용하였음
여기서는 Shi-Tomasi를 사용하였음
Keypoints : Part 2 _ Difference of Gaussians(DoG)
corner detection의 variant(또 다른 형태)
corners, edges, blobs에 대한 반응을 제공
blob
: 주로 constant region이지만, surroundings와 차이가 있는 곳
Keypoints
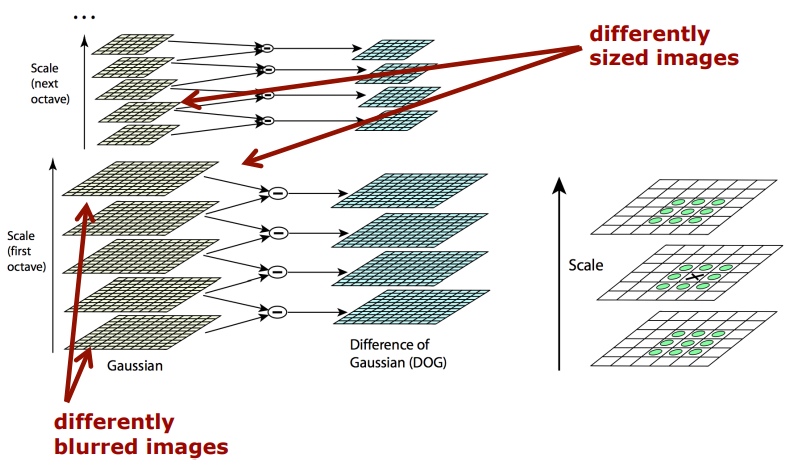
: Difference of Gaussians(DoG) over Scale-Space Pyramid
Procedure
다양한 이미지들은 pyramid levels 거쳐서...
(STEP1)Gaussian smoothing : blur 처리 하는 것
(STEP2)Difference-of-Gaussians(DoG)
(STEP3)maxima suppression at edges
Illustration
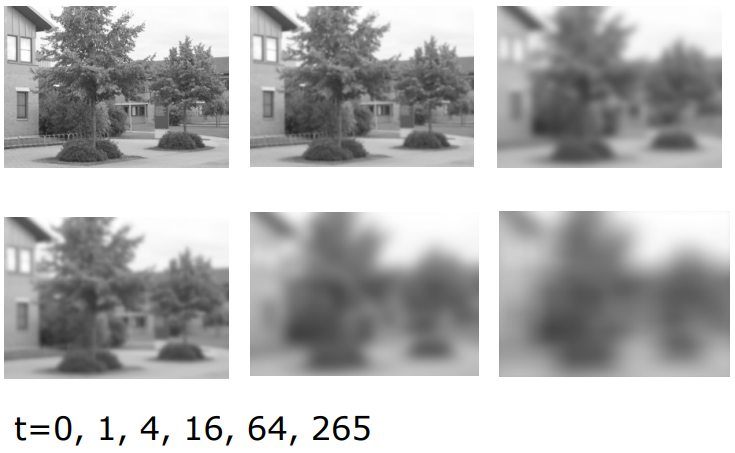
Difference of Gaussians (DoG)
- 다르게 blurred된 images를 서로 뺀 결과는 다음과 같이 나와

왼쪽 사진이 원본이고
오른쪽 사진이 blurred된 정도가 다른 두 image를 뺀 결과 - corners, edges, other detail에 대한 가시성이 더 높아진 것을 확인해볼 수 있음 😄
- DoG는 band-pass filter와 같은 역할을 함
band-pass filter
: 특정한 주파수만 통과시키는 filter
Scale Space Representation
 Keypoints는 different (smoothing) scales을 걸쳐 DoG의 결과로 얻게 되는 극값(extrema)
Keypoints는 different (smoothing) scales을 걸쳐 DoG의 결과로 얻게 되는 극값(extrema)
Summary
- locally distinct points를 찾을 때 2가지 접근법이 존재
Corners via structure matrix- Harris
- Shi-Tomasi
- Forstner
Difference of Gaussians(DoG)- scale과 blur에 걸쳐서 계속 반복
- corner과 blob를 찾기
한눈에 정리
참고자료
