IMU 센서 활용
imu raw data 확인
xycar_ws
├ src
│ └ my_imu
│ ├ src
│ ├ └ roll_pitch_yaw.py
│ └ launch
│ └ roll_pitch_yaw.launch
├ build
└ develroslaunch my_imu roll_pitch_yaw.launch
/imu 토픽 정보 확인
Header : 시퀀스번호와 시간, 아이디 정보
Quarternion : 기울어짐 정보

IMU 데이터 시각화
차량 기울기 정보를 RVIZ 뷰어로 확인
xycar_ws
├ src
│ └ rviz_imu
│ ├ src
│ ├ launch
│ │ └ imu_3d.launch
│ └ rviz
│ └ imu_3d.rviz
├ build
└ develroslaunch rviz_imu imu_3d.launch
RVIZ기반 IMU뷰어
주어진 imu_data.txt 파일에서 Imu 메시지 타입에 맞게 가공
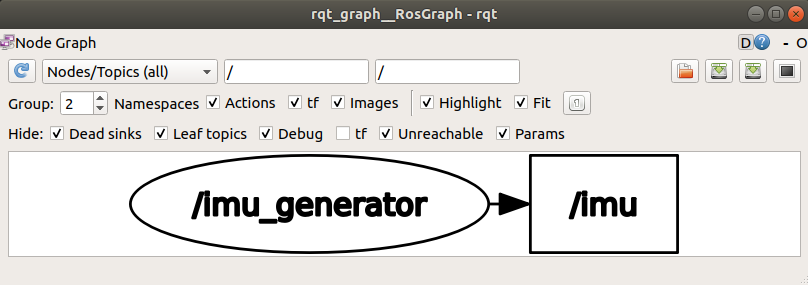
가공된 데이터를 /imu 토픽에 넣은 후 RVIZ 뷰어로 발행
xycar_ws
├ src
│ └ rviz_imu
│ ├ src
│ │ └ imu_generator.py
│ │ └ imu_data.txt
│ ├ launch
│ │ └ imu_generator.launch
│ └ rviz
│ └ imu_generator.rviz
├ build
└ develroslaunch rviz_imu imu_generator.launch
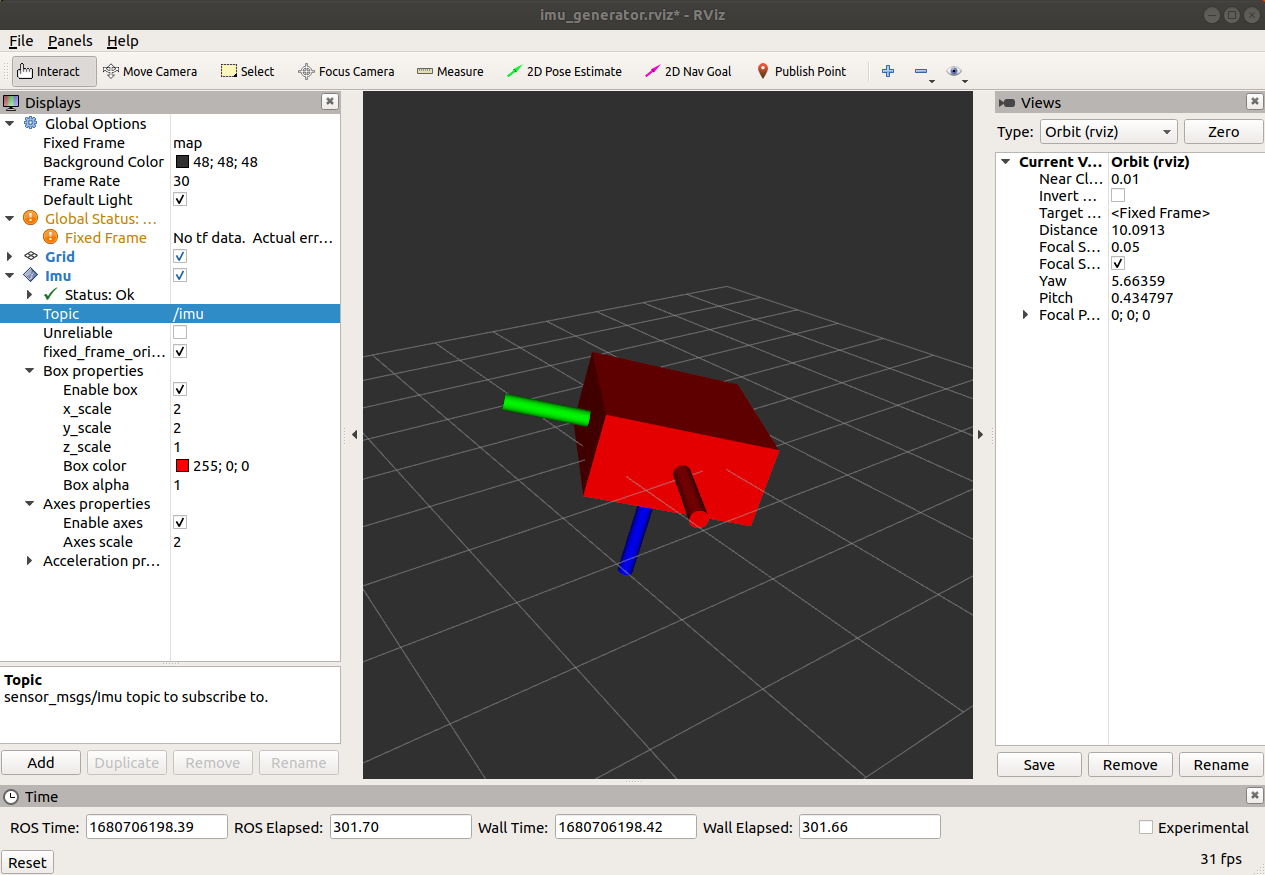
RVIZ 설정
ADD > rviz_imu_plugin > Imu
Imu > Topic : /imu
Imu > Box properties > Enable box
Imu > Axes Properties > Axes scale : 2
설정 저장
Ctrl Shift S
