xycar_ws
├ src
│ └ xycar_device
│ └ xycar_lidar
├ build
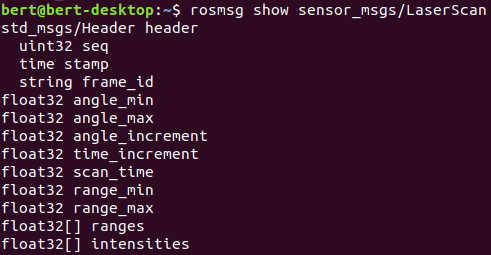
└ devel/scan 토픽 정보 확인
Header : 시퀀스번호와 시간, 아이디 정보
range : 장애물까지의 거리정보
LIDAR 센서 활용
라이다를 이용하여 장애물까지의 거리정보를 획득하여 화면에 출력
360 주변을 30씩 나누어 12개 값만 표시
xycar_ws
├ src
│ └ my_lidar
│ ├ src
│ │ ├ lidar_scan.py
│ │ └ lidar_topic.bag
│ └ launch
│ └ lidar_scan.launch
├ build
└ develroslaunch my_lidar lidar_scan.launch
LIDAR 센싱 데이터 시각화
라이다 정보를 RVIZ 뷰어로 확인
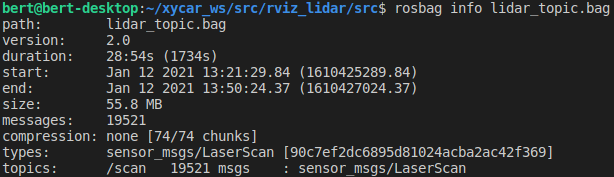
rosbag이용
라이다에서 발행하는/scan토픽을 저장해 놓은 파일
그 당시 시간 간격에 맞추어/scan토픽 발행 가능
ros기본 패키지rosbag사용
xycar_ws
├ src
│ └ rviz_lidar
│ ├ src
│ ├ launch
│ │ └ lidar_3d.launch
│ └ rviz
│ └ lidar_3d.rviz
├ build
└ develroslaunch rviz_lidar lidar_3d.launch
roslaunch rviz_lidar lidar_3d_rosbag.launch
lidar_topic.bag
dt1.bag
대륭타워 강의장에서 라이다를 이용해 .bag파일 녹화 후 실행
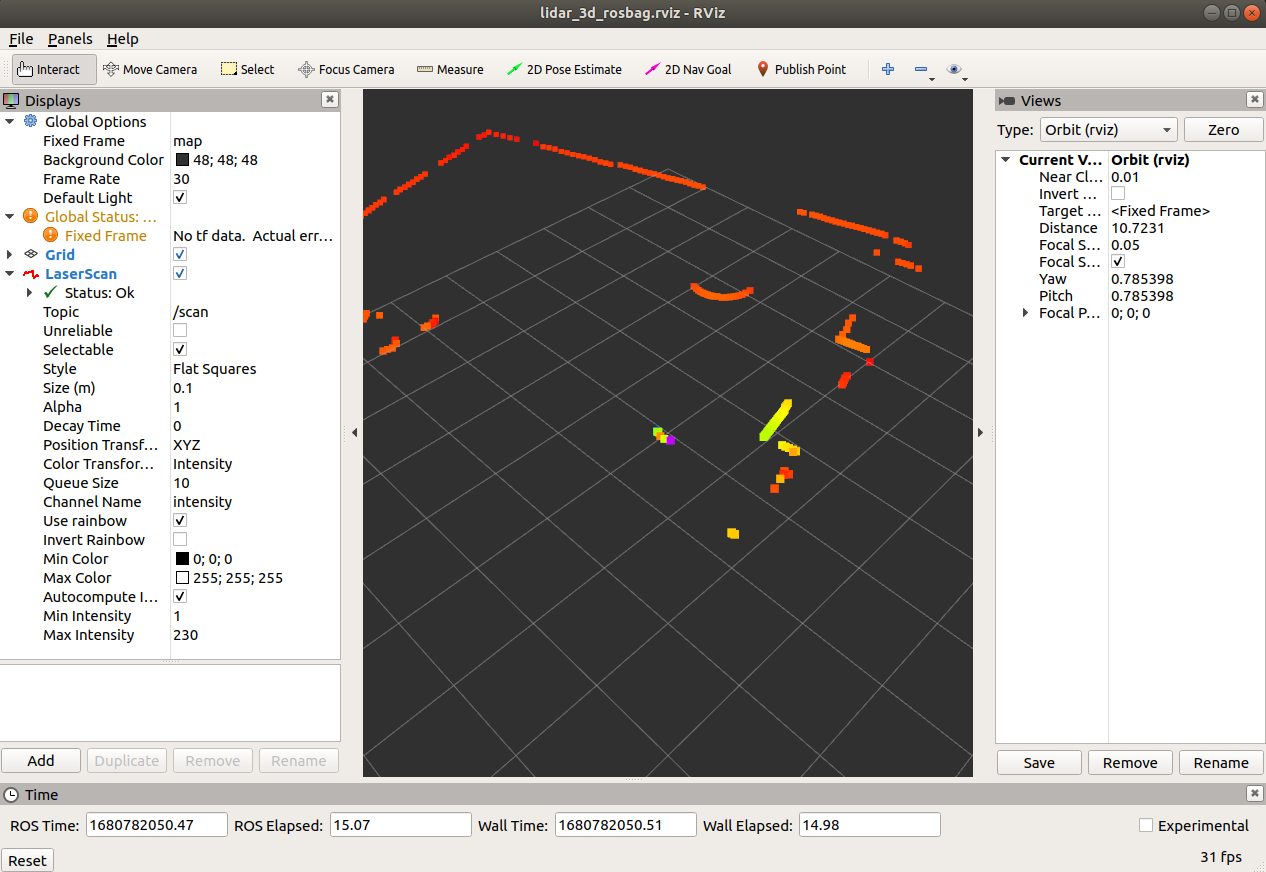
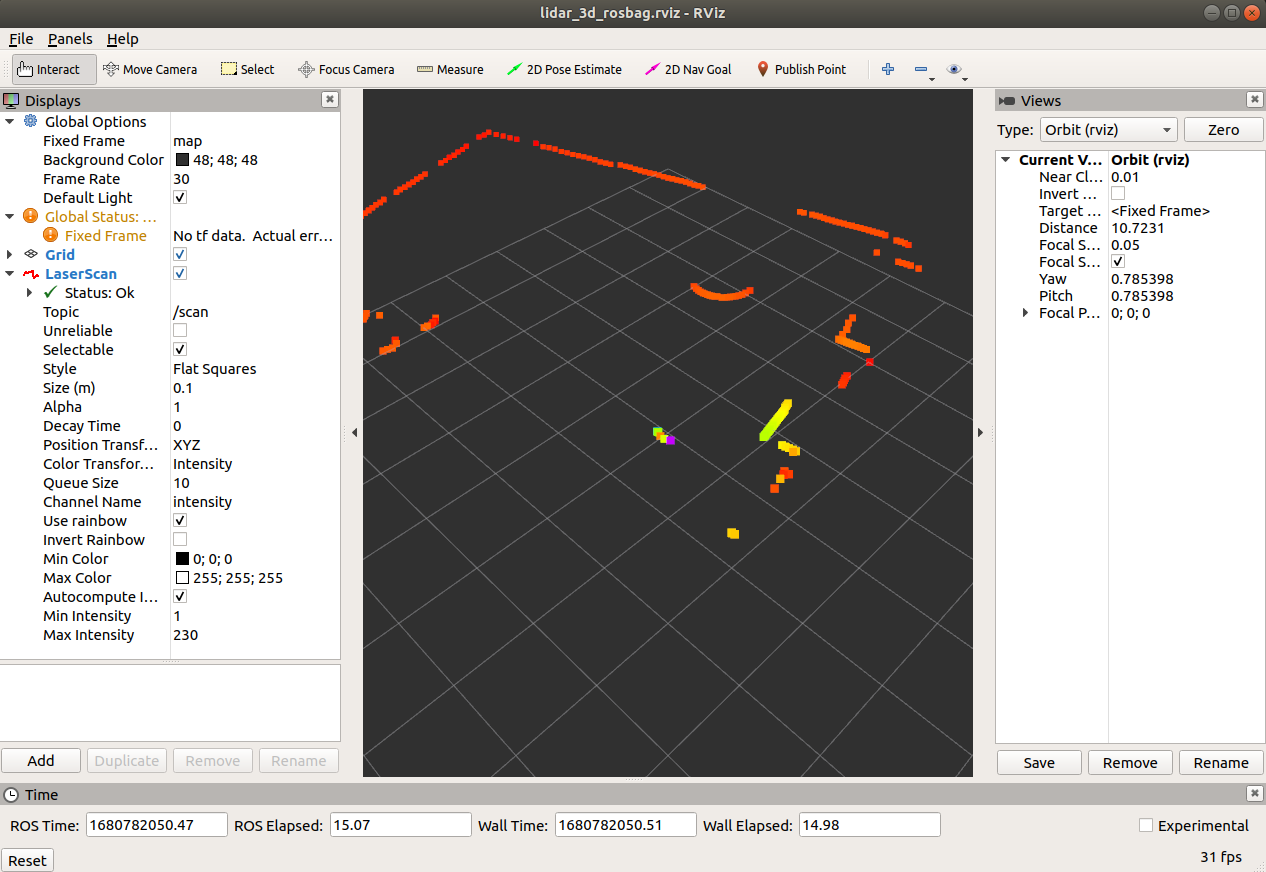
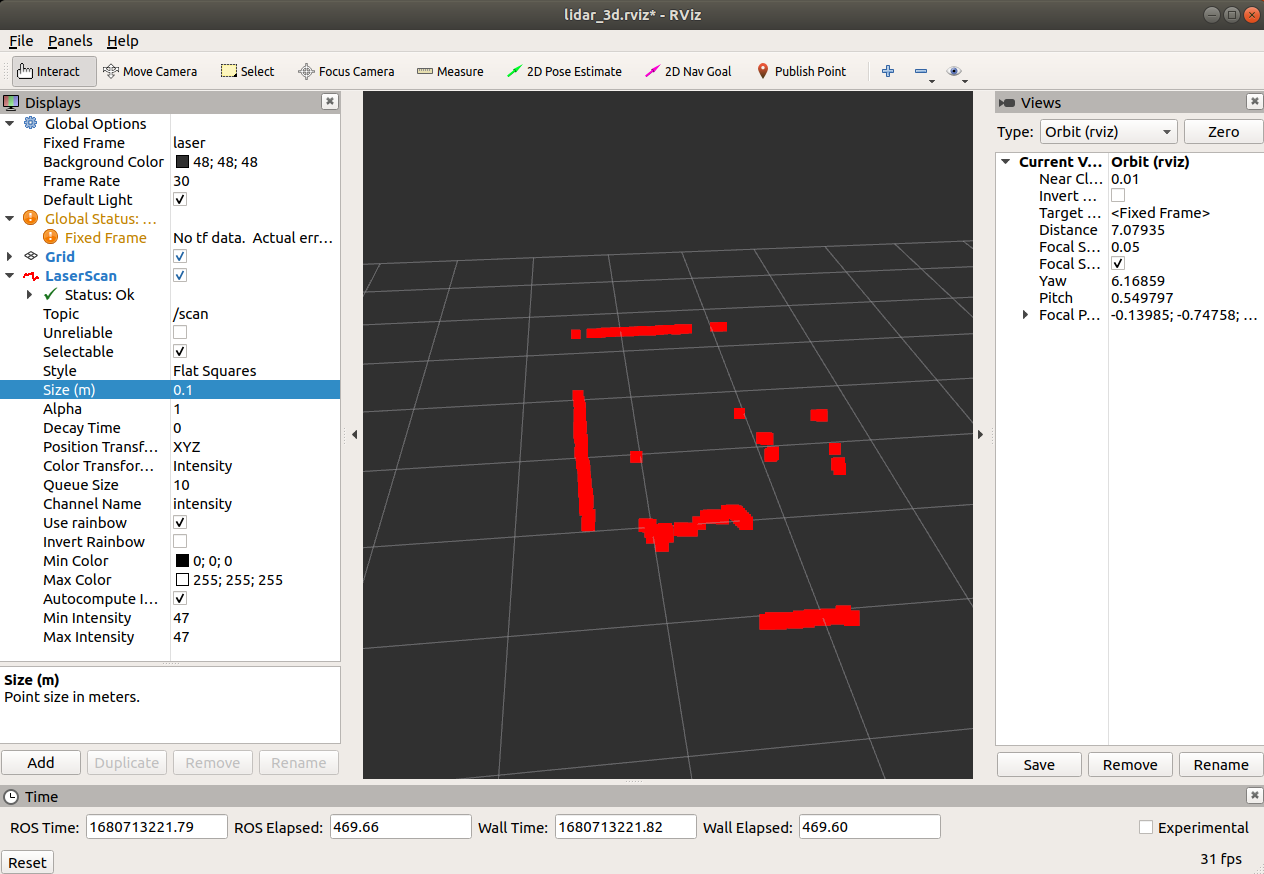
RVIZ 설정
ADD > LaserScan
LaserScan > Topic : /scan
LaserScan > Size : 0.1
Global Options > Fixed Frame : laser
/scan 토픽 header의 frame_id에서 "laser" 확인 가능
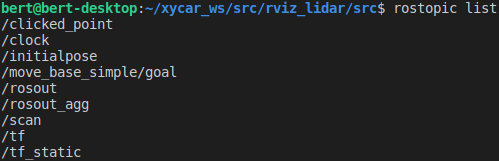
rostopic list
rostopic echo /scan

rosbag 사용법
기록
rosbag record -O lidar_topic scan
발행
rosbag play lidar_topic.bag
<launch>
<node name="rosbag_play" pkg="rosbag" type="play" output="screen"
required="true" args="$(find rviz_lidar)/src/lidar_topic.bag"/>
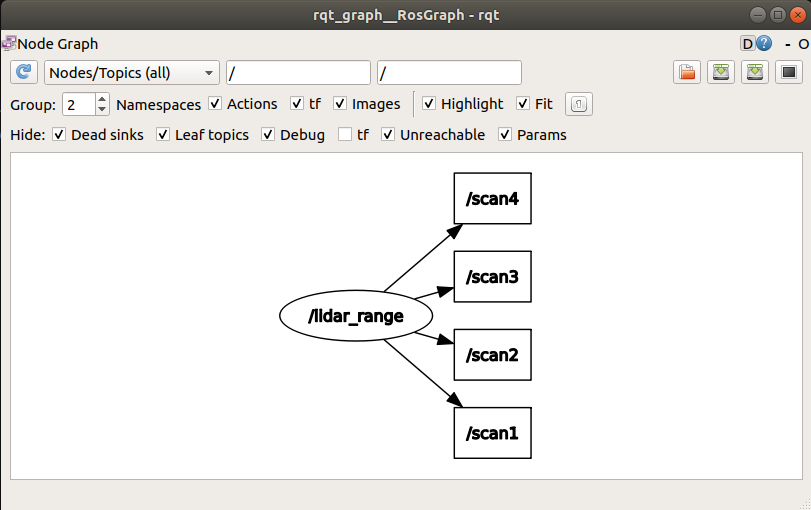
</launch>RVIZ기반 LIDAR뷰어1
xycar_ws
├ src
│ └ rviz_lidar
│ ├ src
│ │ └ lidar_range.py
│ ├ launch
│ │ └ lidar_range.launch
│ └ rviz
│ └ lidar_range.rviz
├ build
└ devel
roslaunch rviz_lidar lidar_range.launch
RVIZ 설정
ADD > By topic > Range
Global Options > Fixed Frame : sensorXY
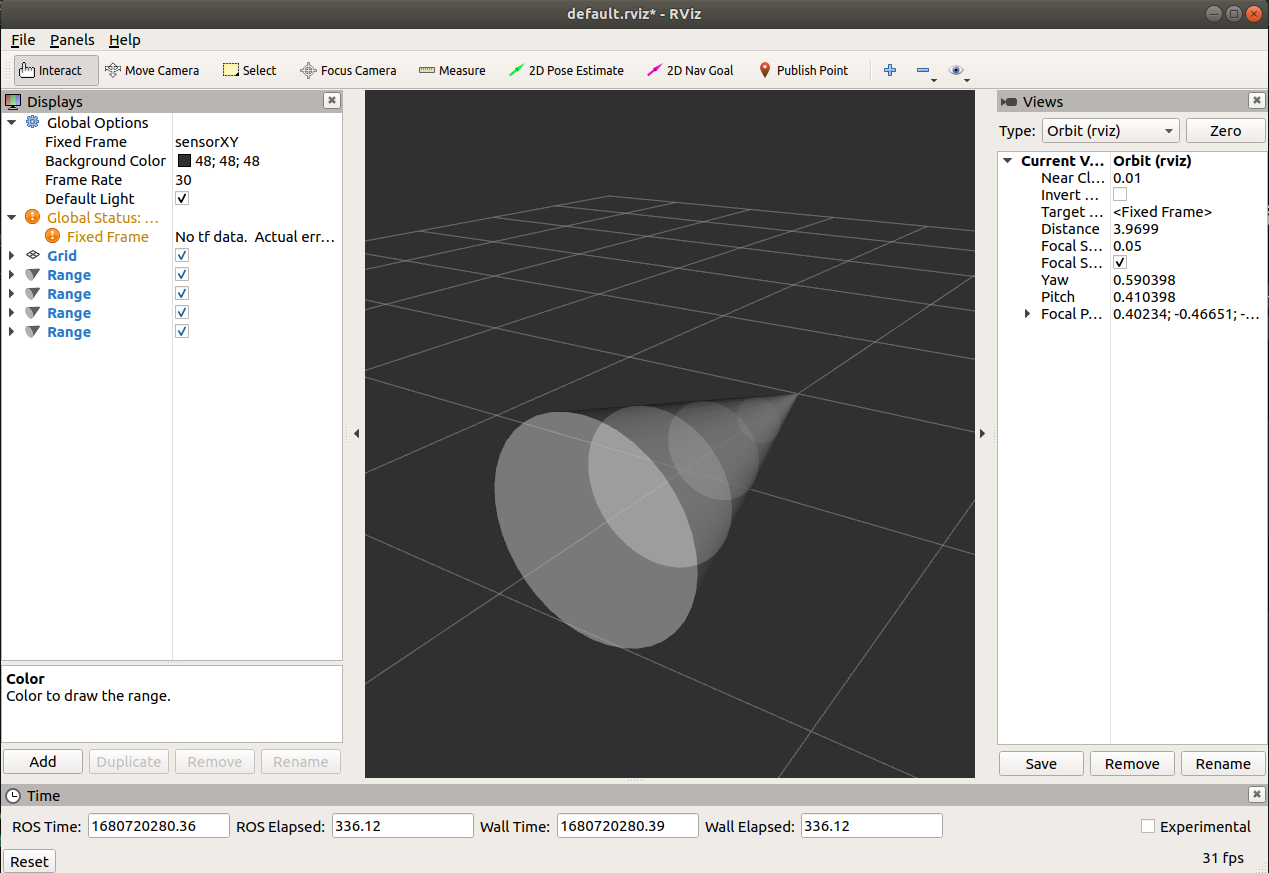
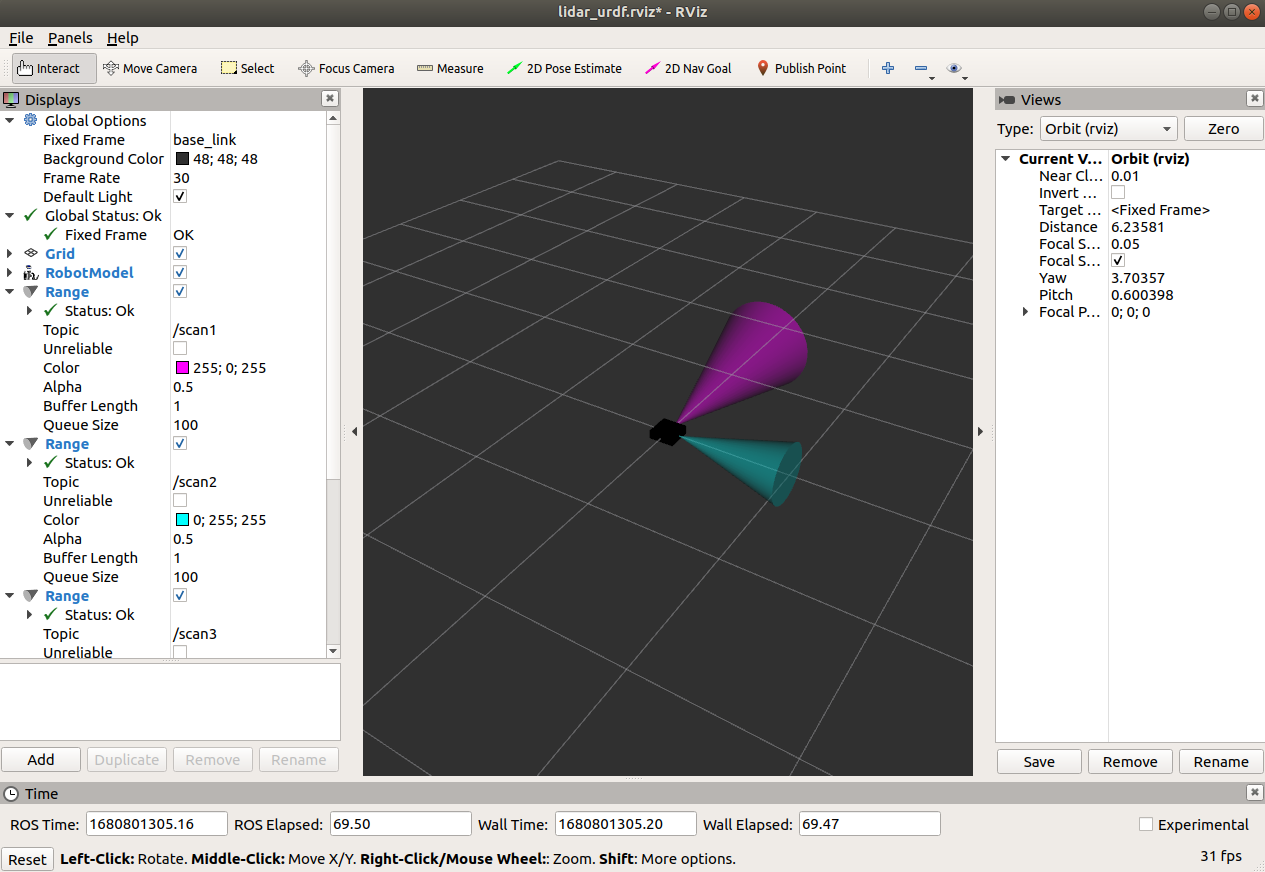
RVIZ기반 LIDAR뷰어2
xycar_ws
├ src
│ └ rviz_lidar
│ ├ src
│ │ ├ lidar_urdf.py
│ │ └ lidar_urdf.bag
│ ├ launch
│ │ └ lidar_urdf.launch
│ ├ urdf
│ │ └ lidar_urdf.urdf
│ └ rviz
│ └ lidar_urdf.rviz
├ build
└ develLaserScan 타입 데이터를 받아 Range 타입으로 변경
roslaunch rviz_lidar lidar_urdf.launch