Odometry
기기의 측정값으로 움직이는 사물의 위치를 측정하는 방법
바퀴의 회전수로 이동 거리 계산
l = 2r
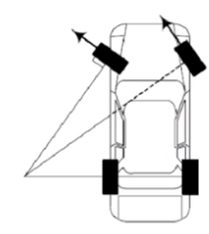
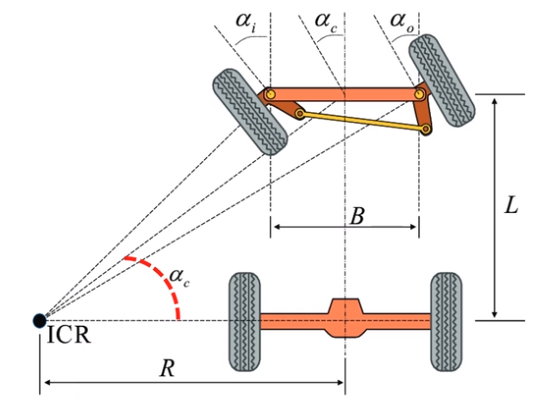
자동차 핸들과 앞 바퀴
앞 바퀴 2개
- 회전 시 꺾이는 각도가 다름
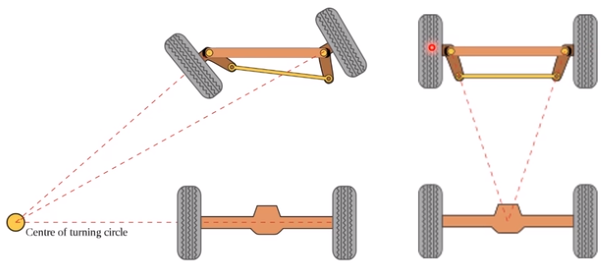
- 안쪽과 바깥쪽 회전 원의 중심이 일치해야 함
Ackermann Steering
각도는 를 기준
자동차 위치 정보
현재 위치 : , ,
이동 속도 : ,
조향각 :
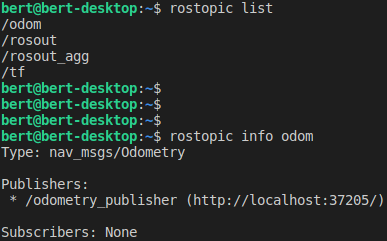
RVIZ 기반 Odometry 활용
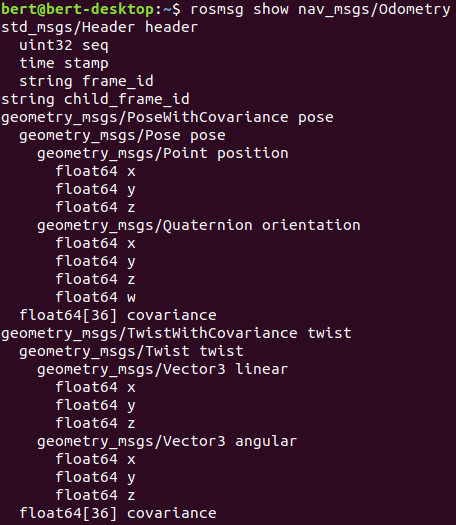
Point Position 위치 좌표
Quaterniaon orientation Euler Angles(Roll,Yaw,Pitch) 대신 Quarternian 표현
Vector3 linear 선속도
Vector3 angular 각속도
이동 속도 벡터 계산
odom_publisher_ex
xycar_ws
├ src
│ └ ex_urdf
│ ├ src
│ ├ └ odom_publisher_ex.py
│ └ launch
│ └ odom_pub.launch
├ build
└ develroslaunch ex_urdf odom_pub.launch
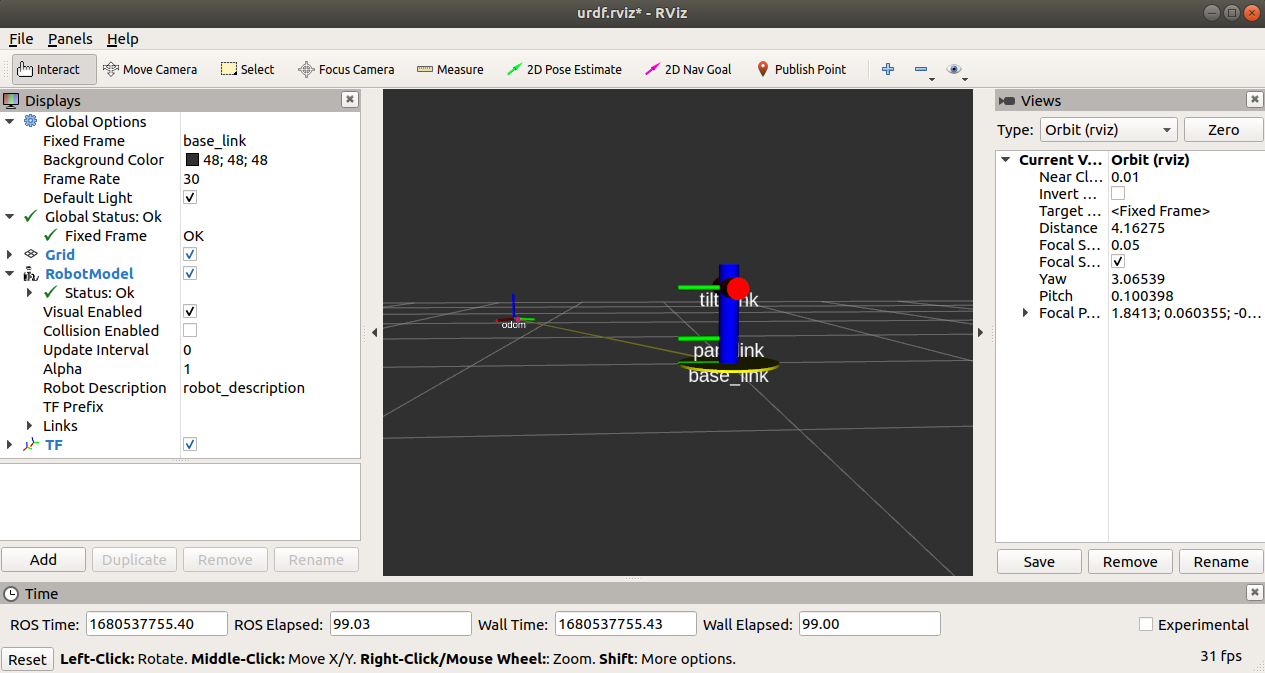
Fixed Frame을 odom으로 변경
odom을 기준으로 pan_tilt가 움직임

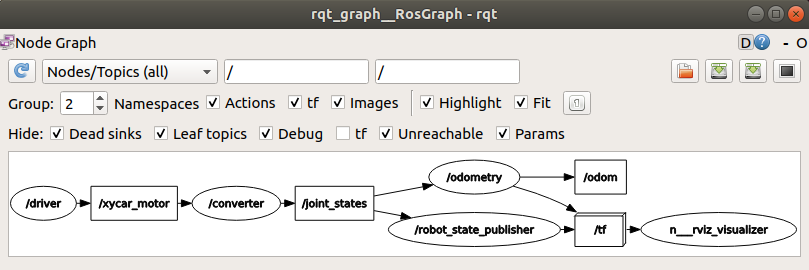
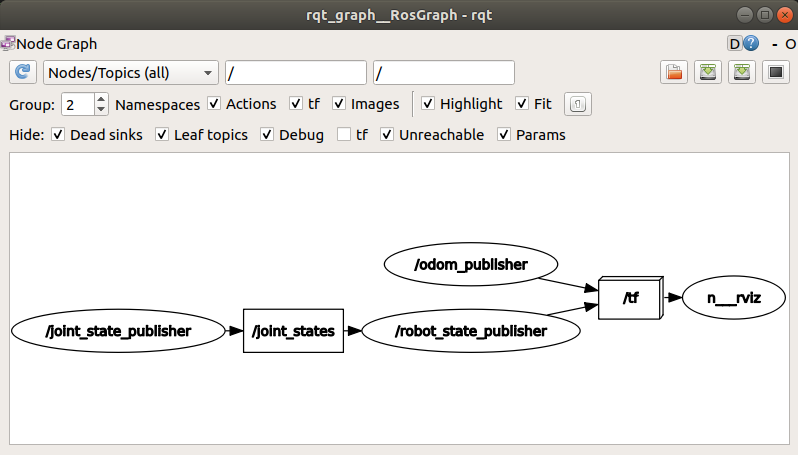
rqt_graph
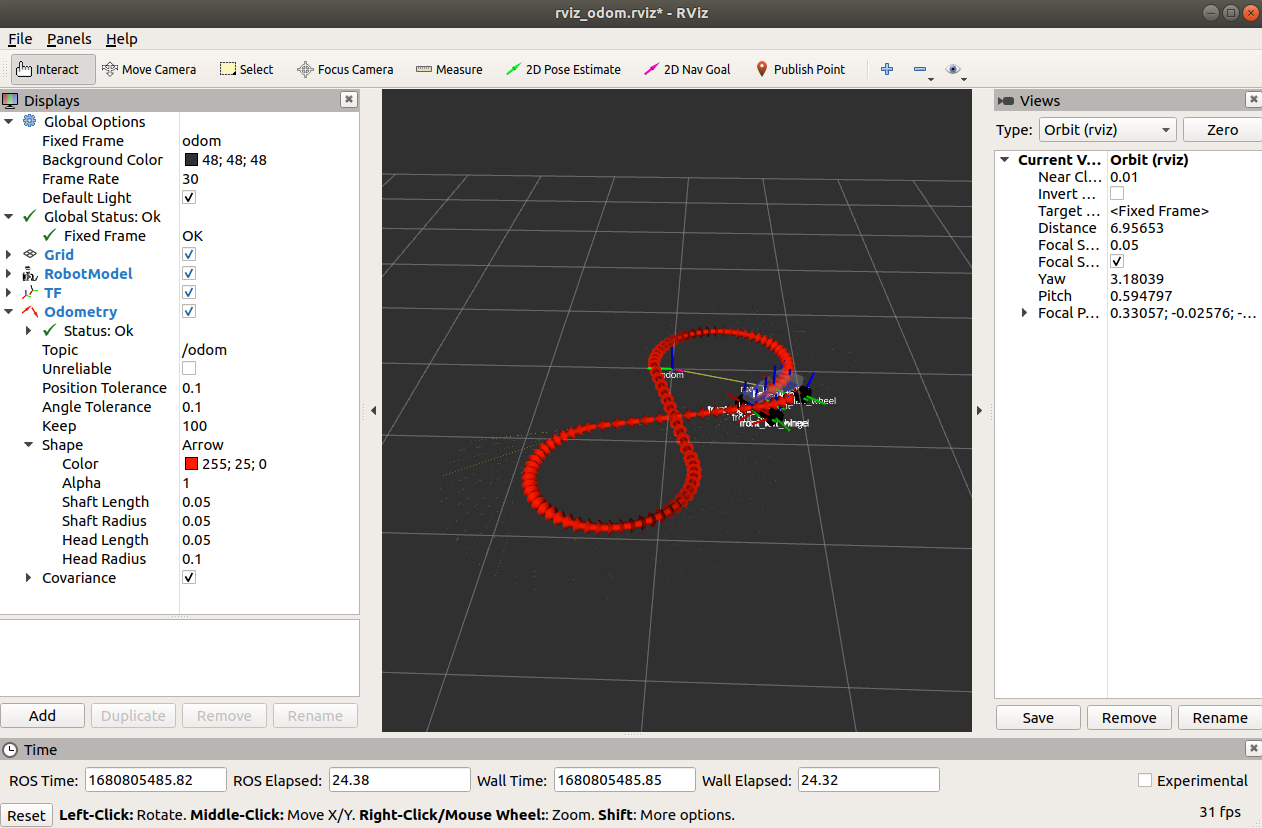
RVIZ 가상공간에서 8자 주행시키기
xycar_ws
├ src
│ └ rviz_xycar
│ ├ src
│ │ ├ converter.py
│ │ ├ odom_8_drive.py
│ │ └ rviz_odom.py
│ ├ launch
│ │ └ rviz_odom.launch
│ ├ urdf
│ └ rviz
│ └ rviz_odom.rviz
├ build
└ devel동작 과정
8자 주행 프로그램이 모터제어 메시지를 담은 /xycar_motor 토픽 보내면
변환 프로그램이 메시지 변환 후 /joint_states 토픽 만들어 보내고
odometry 프로그램이 변환 후 /odom 토픽 만들어 보냄
roslaunch rviz_xycar rviz_odom.launch
br.sendTransform()의 파라미터
(위치 좌표, 각속도, 현재 시간, 동적 객체 base_link, 기준 객체 odom)
br = tf.TransformBroadcaster()
br.sendTransform((msg.x, msg.y, 0),
tf.transformations.quaternion_from_euler(0, 0, msg.theta),
rospy.Time.now(),
turtlename,
"world")Writing a tf broadcaster (Python)