URDF(Unified Robot Description Format)
로봇의 3D 형상 및 외관, 관성 등 물리적 특성 등을 XML 언어로 정의함
URDF로 정의된 로봇 모델은 RVIZ에서 3차원으로 보거나 Gazebo에서 물리 시뮬레이션이 가능
좌표계
roll, pitch, yaw
단위
길이 m
각도 radian
질량 kg
속도 m/s
각속도 radian/s
형상
직각좌표계 원통좌표계 구좌표계
색상 표현
RGBA를 0~1사이의 숫자로 정의
기구 표현
Base : 고정 부분
Link : 관절에 연결되는 로봇 팔의 부분
Joint : 링크를 연결하는 부위(fixed, revolute, continuous)
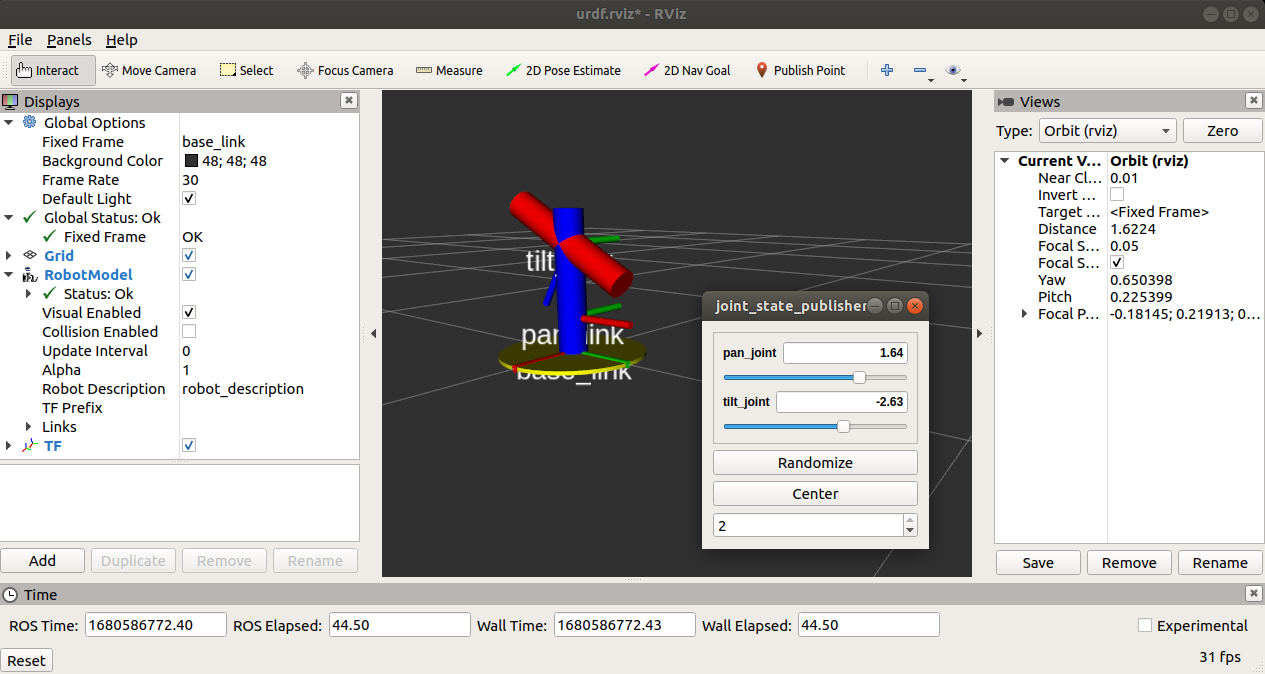
urdf_pan_tilt
xycar_ws
├ src
│ └ ex_urdf
│ ├ launch
│ │ └ view_pan_tilt_urdf.launch
│ └ urdf
│ └ pan_tilt.urdf
├ build
└ develroslaunch ex_urdf view_pan_tilt_urdf.launch
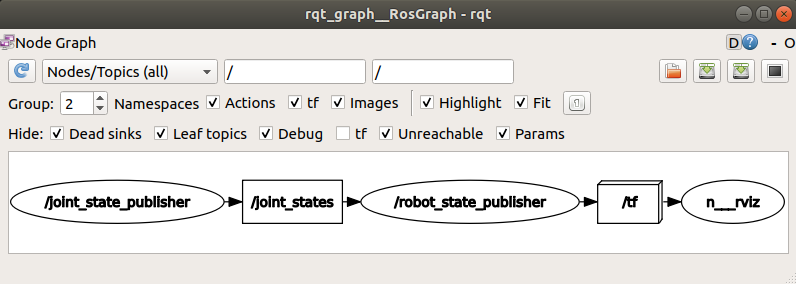
rqt_graph

XYZ축 위치정보
base_link
m
m
joint
pan_link
실린더 중앙 :
m
m
tilt_joint
조인트 위치 :
tilt_link
실린더 중앙 :
m
m

urdf 그래프로 표현 후 pdf로 저장
urdf_to_graphiz pan_tilt.urdf
