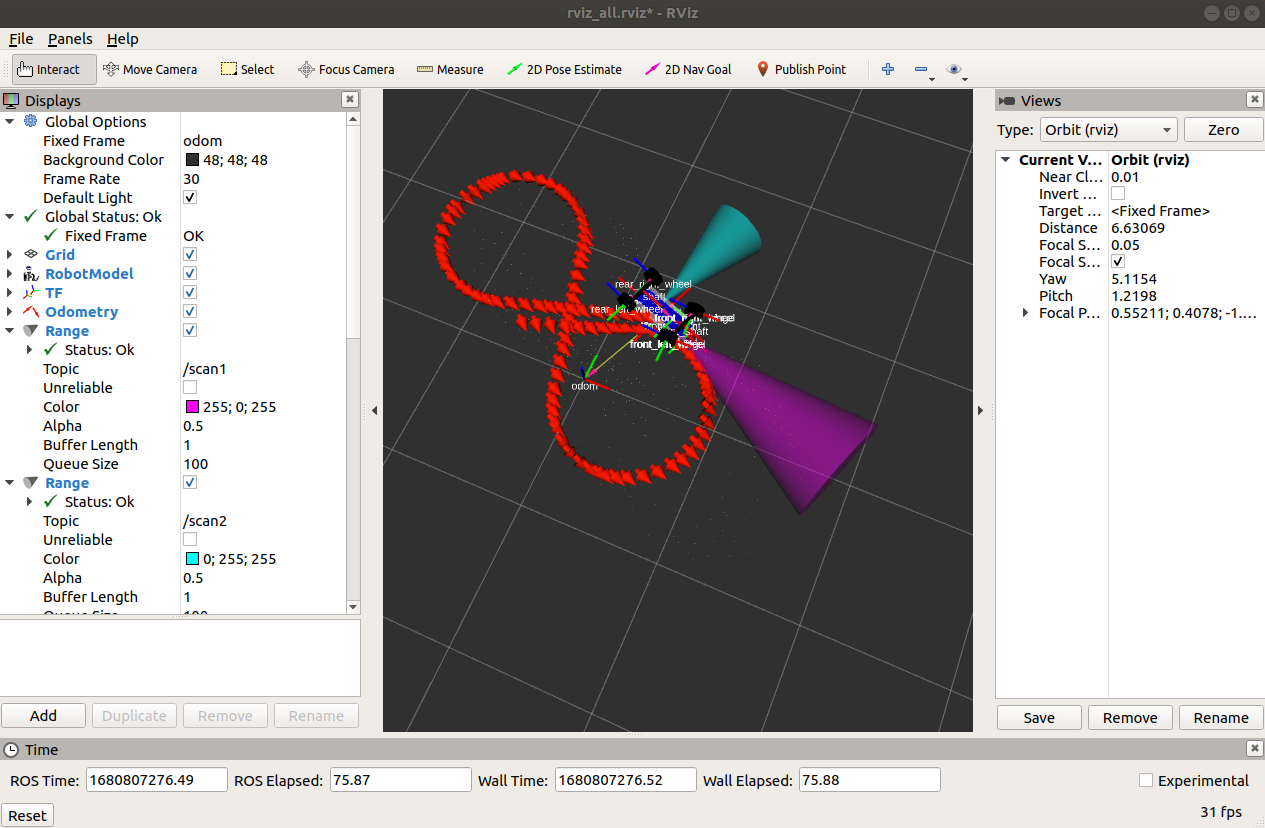
LIDAR센서와 IMU센서 뷰어 통합
xycar_ws
├ src
│ └ rviz_all
│ ├ src
│ │ └ odom_imu.py (rviz_odom.py 수정)
│ ├ launch
│ │ └ rviz_all.launch
│ ├ urdf
│ │ └ rviz_all.urdf (xycar_3d.urdf+lidar_urdf.urdf)
│ └ rviz
│ └ rviz_all.rviz (rviz_odom.rviz 참고)
├ build
└ develroslaunch rviz_all rviz_all.launch