차선 주행
USB 카메라와 OpenCV를 이용하여 차선 인식
인식된 차선을 따라 스스로 주행
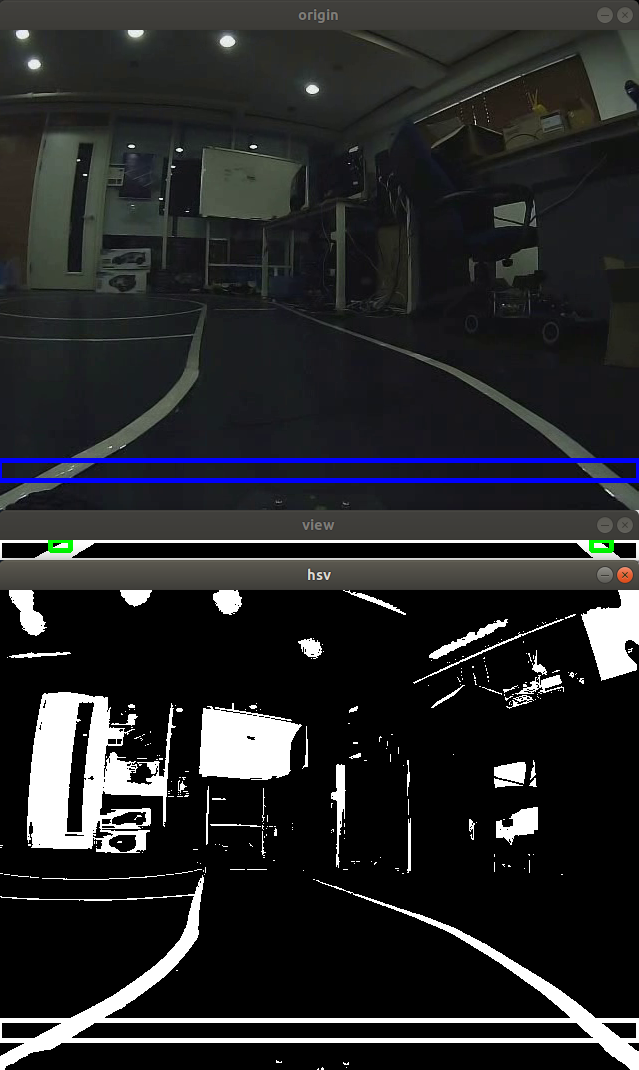
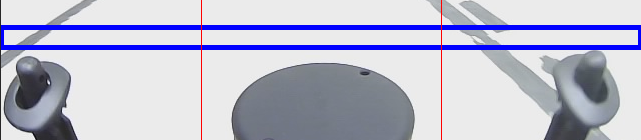
카메라 입력 영상에서 적절한 영역 크롭
바깥에서 중앙으로 흰색 점 감지
점 주위에 사각형 생성 후 사각형 내부 흰색점이 기준 개수 이상이면 차선으로 인식
OpenCV 기반 영상 처리
| Image Read | 카메라 영상신호를 이미지로 읽기 |
| GrayScale | 흑백 이미지 전환 |
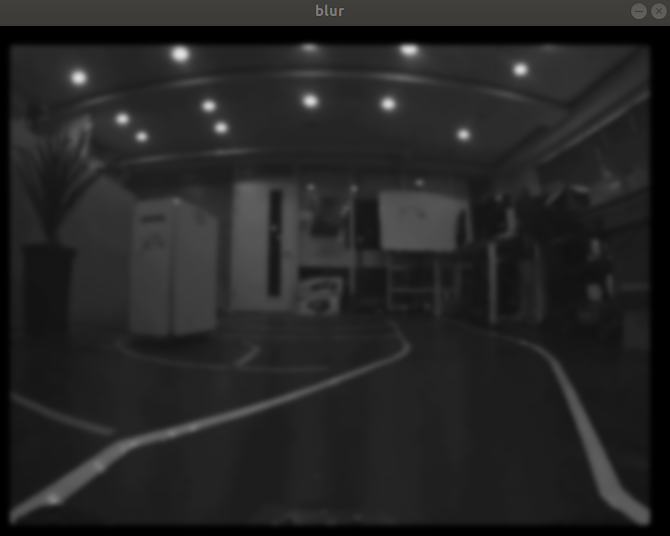
| Gaussian Blur | 노이즈 제거 |
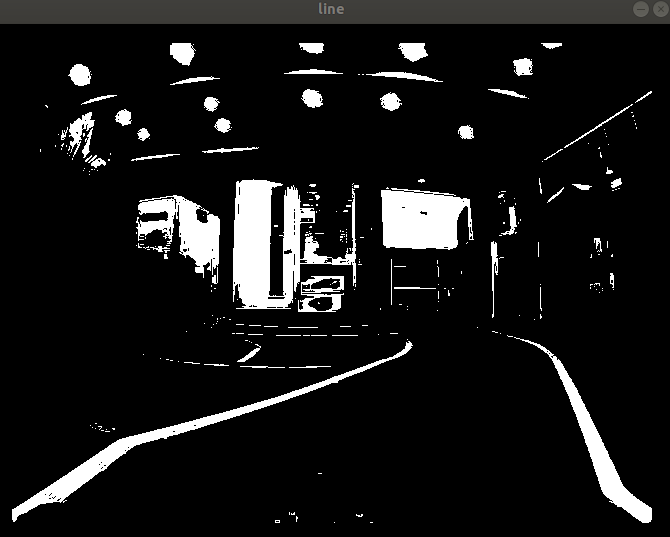
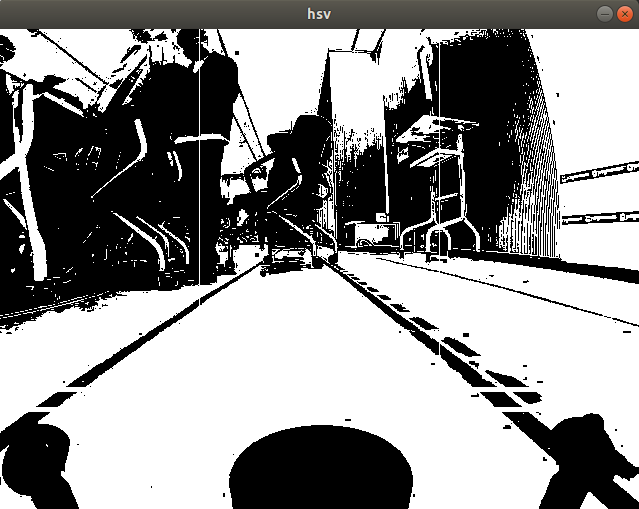
| HSV - Binary | HSV 기반 이진화 처리 |
| ROI | 관심영역 크롭 |
gray.py

blur.py
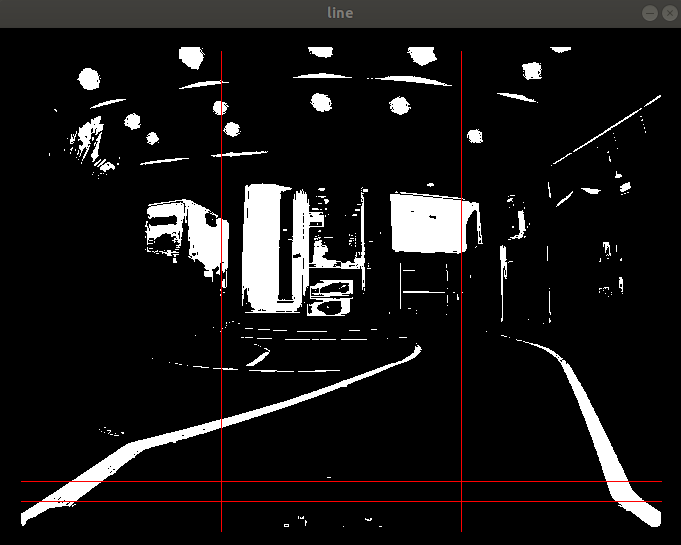
line.py
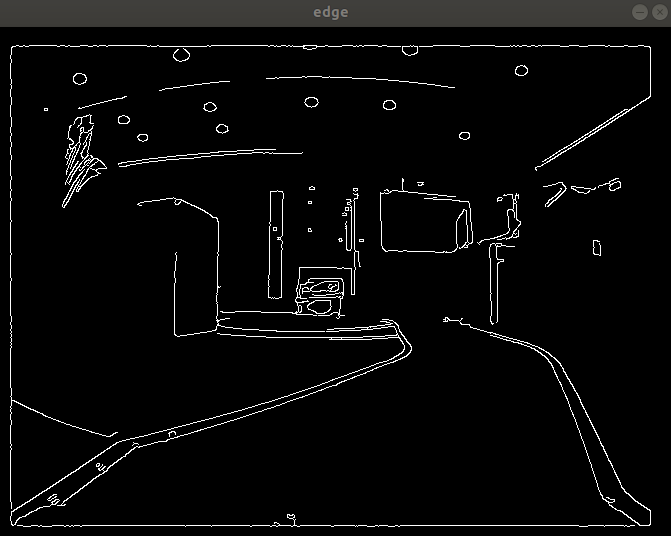
canny.py
nonzero.py

카메라 영상에서 차선 검출
BGR HSV 이진화
차선 검출
이진화된 이미지를 BGR로 변환하여 색상을 가지는 사각형 표시
동영상 파일 프레임 : 640x480
세로 : 430~450 vertical:vertical + scan_height_20
가로 : 0~200scan_width, 440~640
패키지 생성
xycar_ws
├ src
│ └ line_drive
│ └ src
│ ├ line_find.py
│ ├ track2.avi
│ └ track1.avi
├ build
└ develpython line_find.py
검정 차선 인식을 위한 색상 반전 시

문제 1
roi 위치 부적절

vertical 430 360 수정
scan_width line 추가
문제 2
exposure 150 기준 hsv 범위 부적절
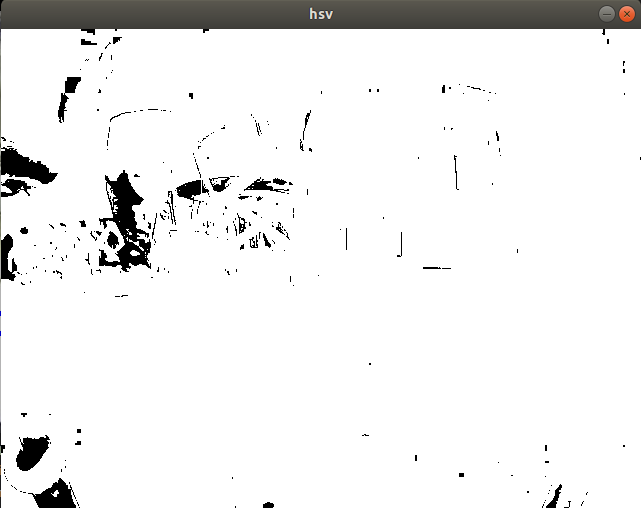
hsv_threshold 60 230 수정
문제 3
pixel 역치값 부적절

pixel_threshold 0.8 0.4 하향

잘보니깐 윈도우가 위에 있음
윈도우 중앙으로 이동 후 역치값 0.8 복구

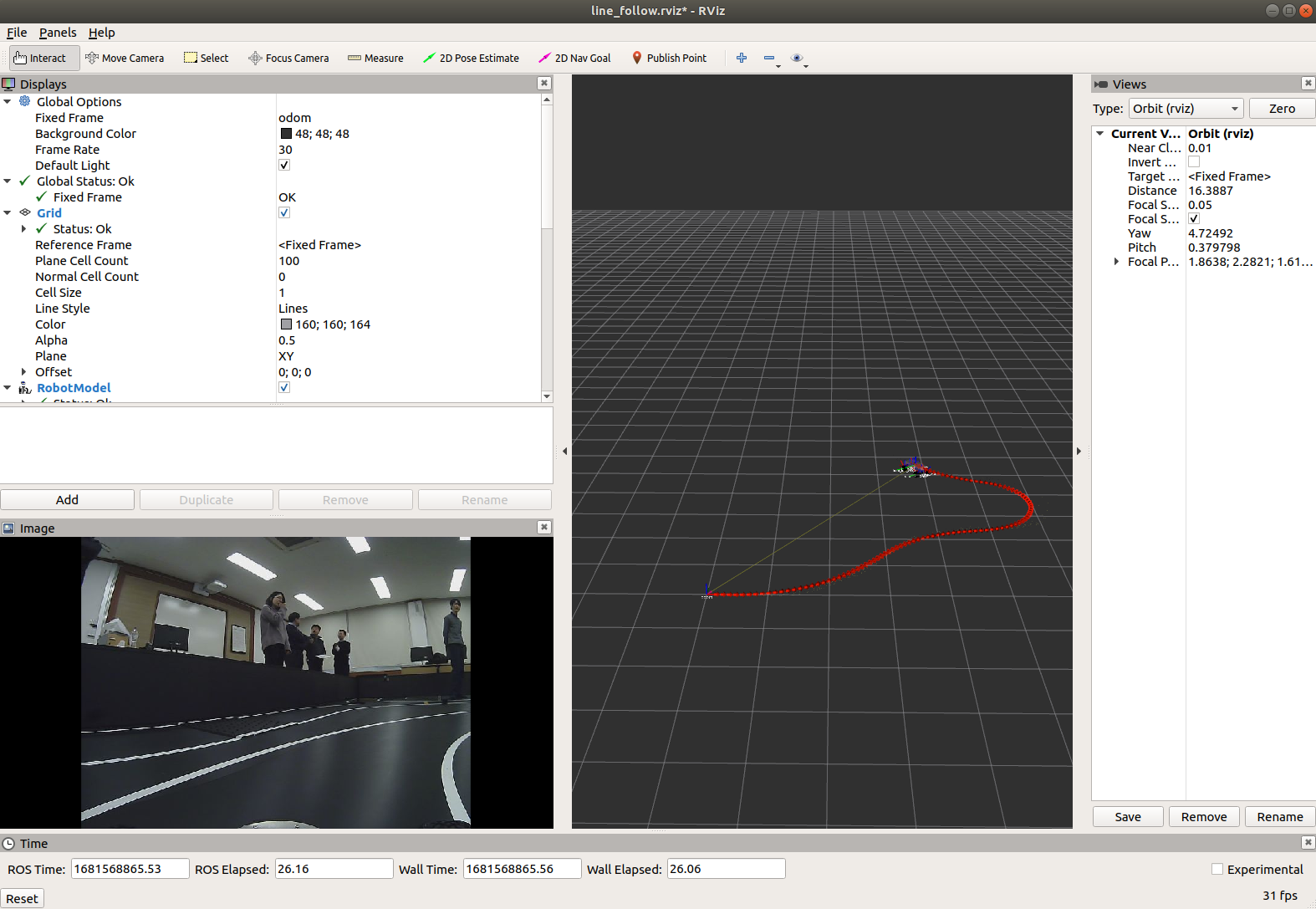
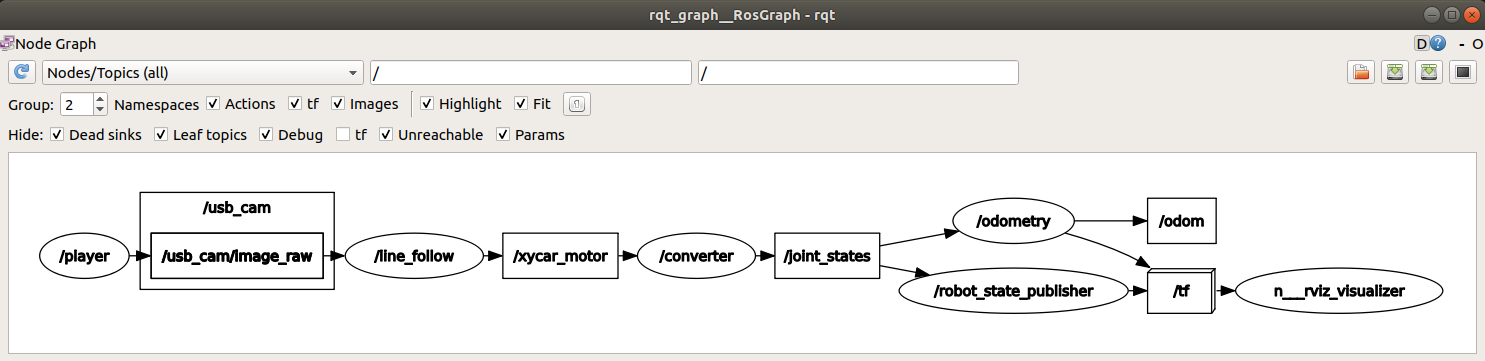
RVIZ 차선 인식 주행
xycar_ws
├ src
│ └ line_drive
│ ├ src
│ │ ├ line_follow.py
│ │ └ cam_topic.bag
│ └ launch
│ ├ line_follow.launch
│ └ line_follow_rosbag.launch
├ build
└ develrosbag play -l cam_topic.bag
roslaunch linedrive line_follow.launch
roslaunch line_drive line_follow_rosbag.launch
문제
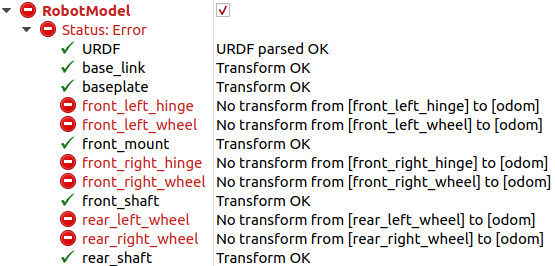
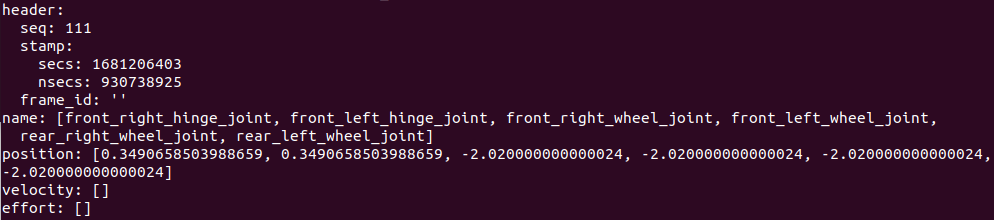
joint_states 토픽 출력되지 않는 것 확인
rostopic echo joint_states

rviz_odom 실행 시 제대로 출력되는 것 확인
roslaunch rviz_xycar rviz_odom.launch
rostopic echo joint_states
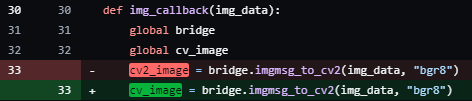
이미지 변수 오타로 인한 입력 데이터 부재 확인