카메라
170 어안렌즈 카메라
640p 120fps, 1080p 30fps
USB 비디오 클래스 - UVC 1.1
카메라 활용 사례
- 차선, 트레킹 구현
라인 트레이서
사람 트레킹
앞차 트레킹 (군집 주행) - 주변상황 인지
전방 이동물체 인식
전방 고정물체 인식 - Localization
주변 지형지물과 지도 데이터 비교 후 현재 차량 위치 유추
차량 장착 카메라 조정
카메라 위치 조정의 격자선을 이용해 영상 영역을 적절히 세팅
카메라 ROS Package
xycar_ws
├ src
│ └ usb_cam
├ build
└ devel카메라 토픽
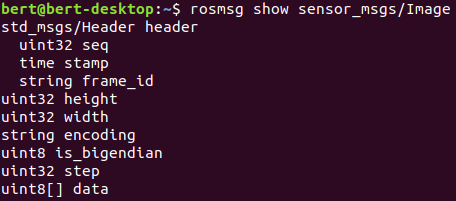
카메라 기능 사용
pkg usb_cam
type usb_cam_node.cpp
- USB 할당 포트 확인
/dev/v4l/by-id/..
<param name="video_deivce" value="/dev/v4l/by-id/.."/> - 노출도 조명 상황에 맞춰 조정
주변 광원의 밝기에 따라 알맞은 노출을 설정함으로써 객체 인식 정확도 향상 가능
<param name="exposure" value="150"/>
xycar_ws
├ src
│ └ my_cam
│ ├ launch
│ │ └ edge_cam.launch
│ └ src
│ └ edge_cam.py
├ build
└ develroslaunch my_cam edge_cam.launch
ROS 토픽의 저장
rosbag record -a | 모든 토픽 저장 |
rosbag record rosout xycar_imu | rosout, xycar_imu 토픽 저장 |
rosbag record -O subset xycar_ultrasonic | 토픽을 subset.bag 파일로 저장 |
rosbag info subset.bag | 저장된 파일 정보 출력 |
rosbag play subset.bag | 저장된 토픽 재생 |
rosbag play -r 2 subset.bag | 2배속 재생 |

저장된 ROS bag 파일에서 카메라 토픽만 꺼내기
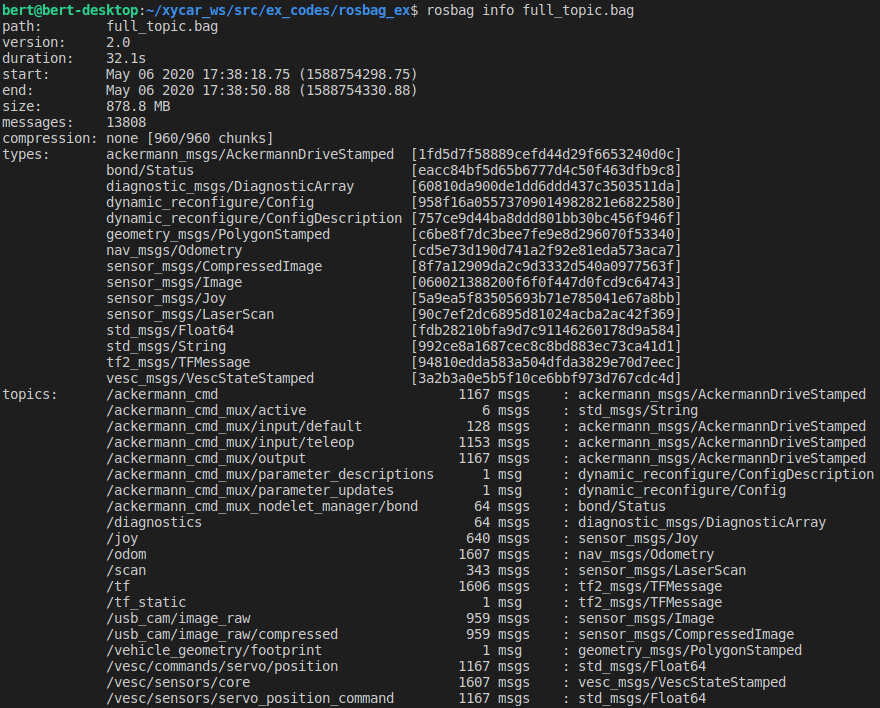
저장된 ROS bag 파일 재생
roscore &
rosbag play full_topic.bag
카메라 토픽만 골라서 저장
rosbag record -O cam_topic /usb_cam/image_raw/

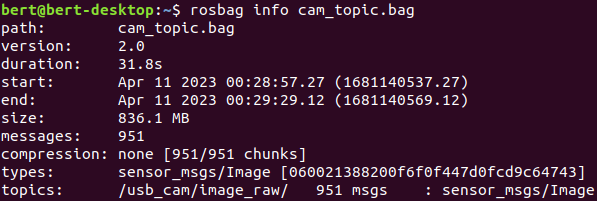
생성된 파일 확인
rosbag info cam_topic.bag
자이카 카메라 활용
xycar_ws
├ src
│ └ opencv_ex
│ └ rosbag_ex
├ build
└ develroscore &
rosbag play cam_topic.bag
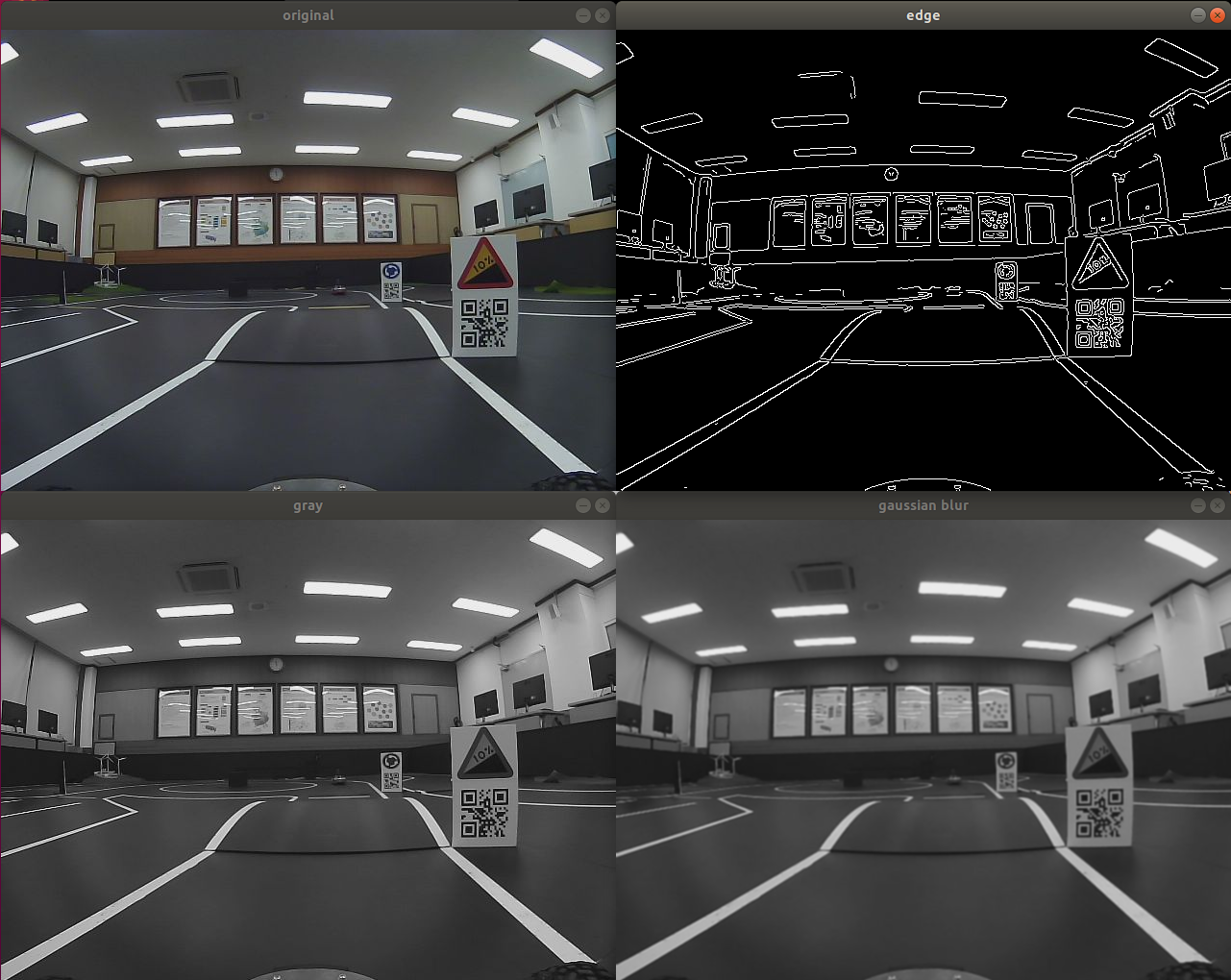
python edge_cam.py
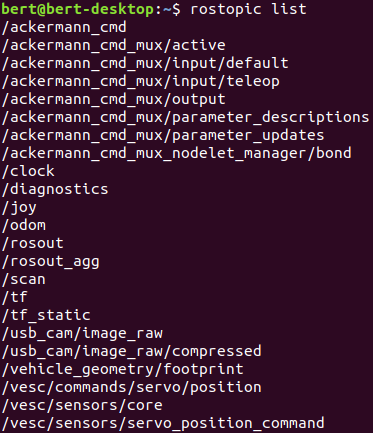
rostopic list

카메라 토픽 모아서 동영상 파일 생성
rosrun image_view video_recorder image:='/usb_cam/image_raw' _filename:='track2.avi' _fps:=30
