📂 CNN 개념
📎 CNN 등장 배경
전통적인 완전 연결 계층(Fully Connected Layer, FC Layer)만을 가진 신경망이 이미지 처리에 어려움을 겪음
-
공간 구조 무시
- 완전 연결 계층은 입력 데이터를 1차원 벡터로 취급
- 이미지와 같은 2차원 데이터에서의 픽셀 간의 공간적인 관계를 무시함
(ex) 이미지 내에서 인접한 픽셀 간의 관계는 중요한 정보를 가지고 있지만, 이러한 정보는 FC Layer에서는 고려되지 않음
-
파라미터의 수
- 완전 연결 계층은 각 노드가 모든 입력과 연결되어 있기 때문에,
- 대규모 이미지를 처리하는 데 필요한 파라미터의 수가 지나치게 많음.
- 이는 과적합의 위험을 증가시키며, 계산적인 부담을 가중시킴.
📎 CNN의 제안
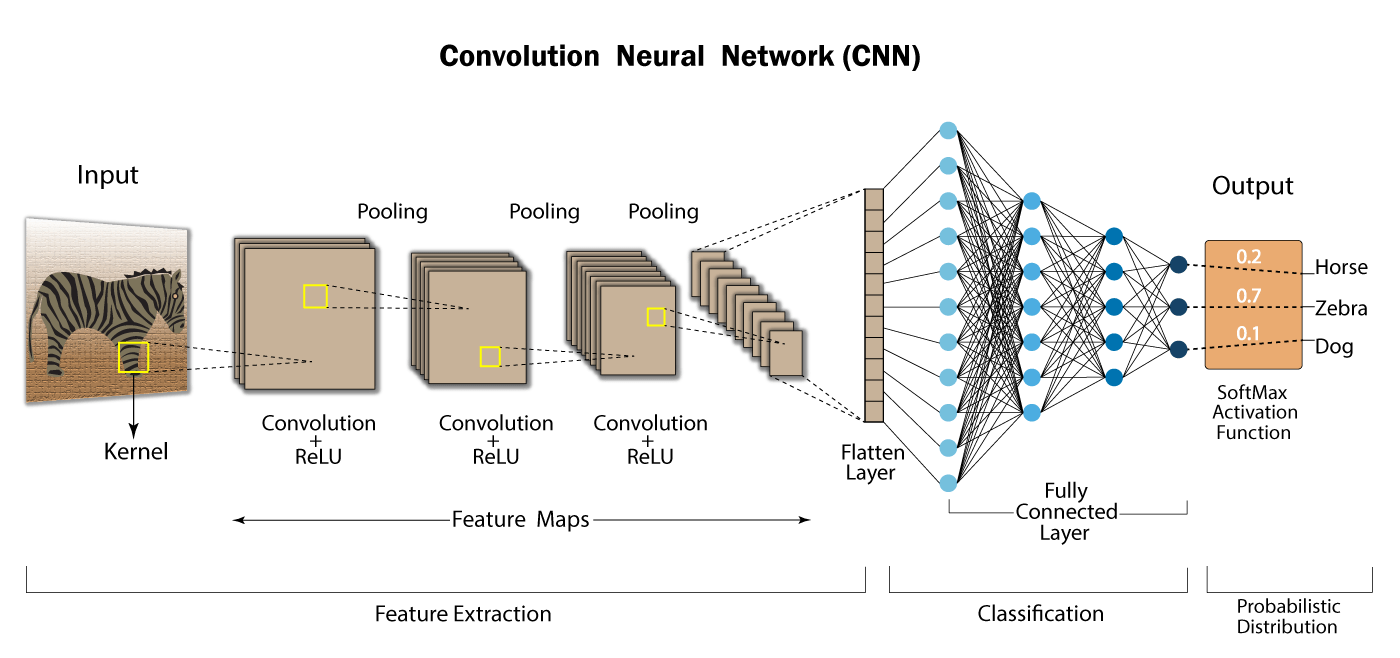
CNN(Convolutional Neural Networks)
-
FC Layer의 문제점을 극복하고 이미지를 분석하기 위해 많은 양의 공간적 구조 정보를 처리하고자 함 -
CNN은 이미지 데이터의 공간적 구조를 활용하고, 작은 인식 영역(Receptive Field)을 통해 지역적인 특징을 학습하며, 위치에 무관한 특징을 인식하는 등의 가정이 내포되어 있음
-
이러한
Inductive Bias덕분에 CNN은 이미지 데이터에 특화된 강력한 성능을 냄
Inductive Bias: 주어지지 않은 입력의 출력을 예측하는 것
📎 CNN 계층 구성
1️⃣ 합성곱 계층
- 합성곱 계층은 지역적인 특징들을 검출하기 위해 사용되는 핵심적인 구성 요소임
- 이미지 내에서 작은 영역의 패턴을 탐지
- 탐지 위해 입력 데이터에 가중치 필터(Filter)를 적용함
- 각 필터는 작은 가중치 행렬로 구성되어 입력 데이터 내에 대응하는 인식 영역인 (Receptive Field)과 합성곱을 수행함
- 전체 입력 데이터를 스캔하면서 이미지의 여러 공간적인 특징을 탐지
🤔 필터(Filter)와 커널(Kernel)
필터와 커널은 약간의 의미적 차이가 있지만, 보통 CNN 구조 내에서는 동의어로 사용됩니다. 커널은 여러 층 중 하나의 층에서 인식 영역과 계산하는 작은 가중치 행렬 개념이라면 필터는 이 커널이 중첩되어 여러 층에 적용될 때 활용하는 개념입니다. 쉽게 말하면 커널의 집합을 필터라고 합니다.
1️⃣-2. 합성곱 계층의 특징
- 지역적인 특징 검출
→ 필터와 입력 데이터의 합성곱을 통해 합성곱 계층은 에지(Edge), 코너(Corner), 질감(Texture) 등과 같은 지역적인 특징을 탐지 가능
→ 합성곱 계층은 이러한 특성들을 추출하는 Feature Extraction 역할
→ CNN은 계층별로 입력 데이터의 패턴을 포착하며, 낮은 계층에서는 간단한 특징을, 높은 계층에서는 보다 복잡한 특징을 탐지
- 변환 불변성
→ 합성곱 계층은 변환 불변성(Translation Invariance)을 가지며, 한 번 학습한 특징은 공간적인 위치에 상관없이 인식
→ 필터의 공유된 가중치로 인해 해당 특징은 전체 입력 데이터에 적용되므로 학습된 특징은 위치에 상관없이 인식
→ CNN이 이미지 내에서 공간적인 변화에도, 불변한 패턴을 인식하는 것
2️⃣ 풀링(Pooling) 계층
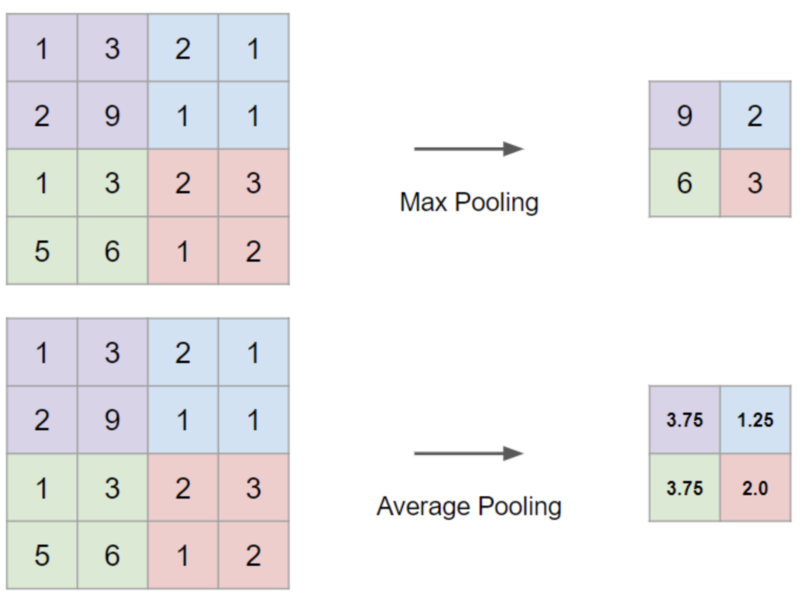
풀링 계층은 이미지의 크기를 줄이는 과정에서 주로 Max Pooling을 사용함
Max Pooling은 주어진 영역에서 가장 큰 값을 선택하여,
DownSampling된 특성맵(Feature Map)을 생성하는 과정을 말함
- 계산 복잡도 감소
⤬ Pooling은 입력 데이터의 공간 해상도(Resolution)를 감소시키는 연산이기 때문에, 특성맵의 크기를 줄이고 연산량을 감소시킴.
⤬ 모델의 학습과 추론 속도를 향상시키는 데 도움.
- 과적합(Overfitting) 방지
⤬ Pooling은 입력 영역에서 가장 큰 값(또는 영역 내 평균값)을 선택하므로, 작은 변동성이나 노이즈에 덜 민감한 특징을 추출 가능.
⤬ 모델의 일반화 성능을 향상시켜 과적합 방지.
- 영역 내에서 공간적인 불변성(Spatial Invariance)
⤬ Pooling은 입력 영역에서 가장 큰 값을 선택하기 때문에, 영역 내에서의 변동이나 이동에 덜 민감함.
⤬ 입력 이미지의 조금씩 이동하거나 변형되더라도 풀링 계층의 출력이 일정한 특성을 가지게 함.
⤬ 이러한 불변성은 이미지의 공간적인 변화에 더 강인한(Robust) 모델을 구축하는 데 도움.
3️⃣ 완전 연결 계층
⤬ 이미지 전체에 대한 정보를 종합하고, 이를 사용하여 최종 출력을 생성
⤬ 이 전 계층까지는 공간적인 정보를 담고 있어 출력된 값이 2차원 이상으로 표현되었지만, 이 계층을 통과하기 위해 평탄화(Flattened) 작업이 이루어짐
⤬ 이전 레이어에서 학습한 특징을 기반으로 고수준의 추상성을 포착하고 최종 예측을 수행하는 데 중요한 역할을 함
⤬ 네트워크가 복잡한 비선형 관계를 모델링하고 분류, 회귀 또는 다른 작업을 수행할 수 있도록 해줌
📂 CNN 특징
📎 변수 공유와 희소 연결
CNN은 이미지의 공간 구조를 활용하기 때문에 효과적으로 파라미터를 공유하고, 훨씬 적은 수의 파라미터로 복잡한 모델을 만들 수 있습니다. 이로 인해 모델의 메모리 사용량이 줄고, 계산 효율성이 향상되며, 과적합의 가능성이 줄어듭니다.
📎 공간적 불변성
CNN은 이미지 내의 객체가 어디에 위치해 있더라도 그 객체를 인식할 수 있습니다. 이는 합성곱 계층과 풀링 계층 덕분에 가능하며, 이를 통해 CNN은 위치에 무관한 특징을 학습할 수 있습니다.
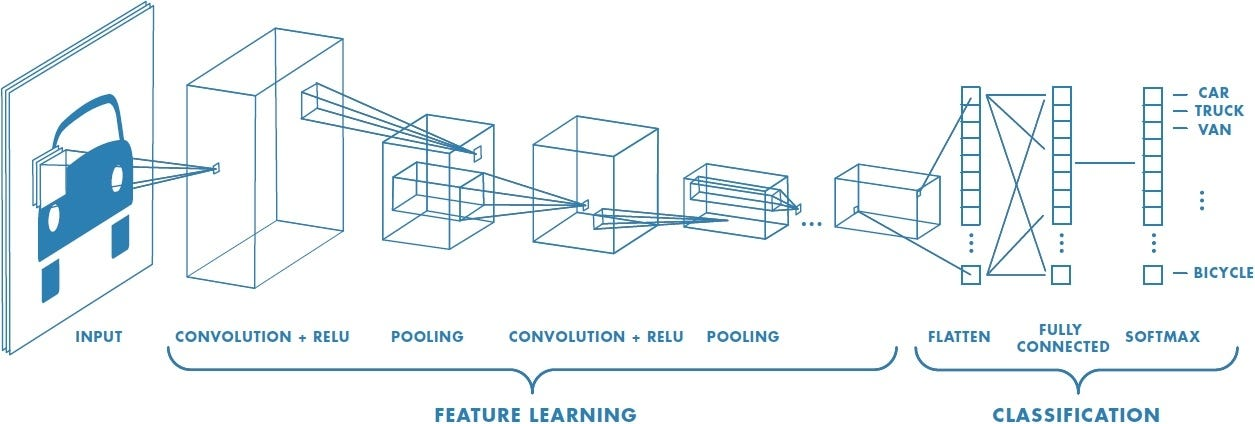
📎 다계층 구조
CNN은 일반적으로 여러 계층으로 구성됩니다. 이를 통해 저수준의 특징(선분, 색상 등)에서부터 고수준의 특징(형상, 객체 등)까지 차례대로 학습할 수 있습니다.
📂 CNN의 연산 과정
📎 합성곱 계층 계산 과정
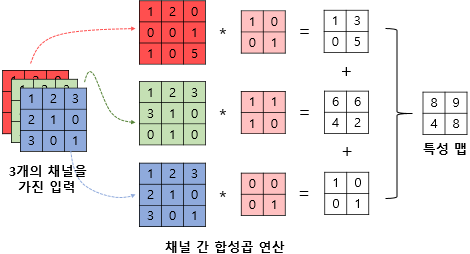
합성곱 레이어에서는 이름에서 알 수 있듯이 합성곱(Convolution) 연산이 이루어집니다. 합성곱은 필터가 이미지를 슬라이드하면서 해당 필터와 이미지 부분 간의 요소별 곱셈을 수행하고 결과를 모두 더하는 과정입니다.
합성곱 계층 연산과정
이 과정을 거치면서 각 위치에서의 합성곱 연산의 결과로 생성된 출력값 행렬이 생성되는데요, 이를 특성맵(Feature Map)이라고 합니다. 이러한 연산은 필터가 탐지한 특정 패턴이 이미지의 어디에 존재하는지를 파악하는 데 도움이 됩니다.
이미지는 상당히 고차원적인 데이터입니다. 예를 들어, 128 × 128 픽셀의 작은 이미지라고 하더라도 컬러 이미지는 각 픽셀마다 빨강, 초록, 파랑의 3개 채널이 있으므로 총 49,152개의 값을 가지게 됩니다. 이렇게 큰 데이터를 처리하려면 많은 계산량이 필요합니다. 그러나 합성곱은 지역적인 영역에 집중하여 계산을 수행하므로 계산량을 크게 줄일 수 있습니다.
👩🏻💻 합성곱 pytorch 코드
import torch
import torch.nn as nn
# 간단한 CNN 모델 정의
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv = nn.Conv2d(3, 16, kernel_size=5)
def forward(self, x):
conv = self.conv(x)
return conv
# 모델의 인스턴스 생성
model = CNN()
# 입력 텐서
x = torch.randn(1, 3, 32, 32) # (배치 크기, 채널, 높이, 너비)
# 합성곱 연산
conv = model(x)
print(conv.shape)
👩🏻💻 합성곱 numpy 코드
import numpy as np
# 입력 텐서
x = np.random.randn(1, 3, 32, 32) # (배치 크기, 채널, 높이, 너비)
# 합성곱 레이어의 가중치
w_conv = np.random.randn(16, 3, 5, 5) # (필터 개수, 입력 채널, 커널 높이, 커널 너비)
b_conv = np.random.randn(16) # (필터 개수)
# 합성곱 연산
conv = np.zeros((1, 16, 28, 28)) # (배치 크기, 필터 개수, 출력 높이, 출력 너비)
for f in range(16):
for i in range(28):
for j in range(28):
conv[0, f, i, j] = np.sum(x[0, :, i:i+5, j:j+5] * w_conv[f]) + b_conv[f]
print(conv.shape)
📎 풀링 계층의 계산 과정
풀링(Pooling)은 특성맵의 크기를 줄이기 위해 DownSampling하는 과정입니다. Pooling의 방법으로는 Average Pooling과 Max Pooling이 있습니다. 이미지 처리 분야에서는 보통 Max Pooling을 활용합니다. Max Pooling은 특성맵을 구성하는 값 중에서 가장 큰 값을 선택하는 방법입니다.
👩🏻💻 Max Pooling pytorch 코드
import torch
import torch.nn as nn
# Create a 2D input tensor
input_tensor = torch.tensor([[1, 2, 3, 4],
[5, 6, 7, 8],
[9, 10, 11, 12],
[13, 14, 15, 16]], dtype=torch.float32)
# Define max pooling layer
max_pool = nn.MaxPool2d(kernel_size=2, stride=2)
# Apply max pooling
output = max_pool(input_tensor.unsqueeze(0).unsqueeze(0)) # Add dimensions for batch and channels
print(output.squeeze(0).squeeze(0))👩🏻💻 Max Pooling numpy 코드
import numpy as np
def max_pooling(x, k):
# x: input feature map
# k: pooling size
height, width = x.shape
h_out = height // k
w_out = width // k
pooled = np.zeros((h_out, w_out))
for i in range(h_out):
for j in range(w_out):
r_start = i * k
r_end = r_start + k
c_start = j * k
c_end = c_start + k
pooled[i, j] = np.max(x[r_start:r_end, c_start:c_end])
return pooled
📎 완전 연결 계층의 계산 과정
완전 연결 레이어는 각 입력 노드와 출력 노드가 모두 연결되어 있습니다.
이 레이어에서의 계산은 기본적으로 입력 특징과 가중치 벡터 간의 내적을 계산하고, 편향을 더하는 것입니다. 수식으로 나타내면 아래와 같습니다.
여기서 는 가중치, 는 입력 데이터(특성맵), 는 편향을 나타냅니다.
계산된 출력은 비선형 활성화 함수(주로 Softmax 등)를 통과하여 최종 결괏값이 출력됩니다.
완전 연결 계층은 보통 네트워크의 마지막 부분에서 계산됩니다.
앞선 단계에서 종합한 공간적 특성들로 최종적인 예측을 수행하는 단계라고 볼 수 있습니다.
이미지 분류 문제로 예를 들면, 마지막 완전 연결 계층의 최종 출력 값은 클래스의 수만큼 지정되고 각 클래스에 대한 확률을 계산합니다. 이를 통해 모델은 이미지가 지닌 복잡한 패턴과 클래스 레이블 사이의 관계를 학습할 수 있습니다.
👩🏻💻 완전 연결 계층 pytorch 코드
import torch
import torch.nn as nn
# 랜덤한 입력 텐서 생성
x = torch.randn(32, 16) # (배치 크기, 입력 크기)
# 완전 연결 레이어 정의
fc = nn.Linear(16, 10) # (입력 크기, 출력 크기)
# 완전 연결 레이어 적용
output = fc(x)
print(output.shape) # 출력 형태: (32, 10)👩🏻💻 완전 연결 계층 numpy 코드
import numpy as np
# 입력 텐서
x = np.random.randn(32, 16) # (배치 크기, 입력 크기)
# FC 레이어의 가중치
w_fc = np.random.randn(16, 10) # (입력 크기, 출력 크기)
b_fc = np.random.randn(10) # (출력 크기)
# FC 연산
fc = np.dot(x, w_fc) + b_fc
print(fc.shape)
[출처 | 딥다이브 Code.zip 매거진]
