Convolutional Neural Networks (CNN)
Introduction
Convolutional Neural Networks (CNNs) are a class of deep neural networks that are primarily used to analyze visual imagery. They employ a mathematical operation known as convolution and have proven extremely effective for various image and video recognition, recommender systems, image classification, medical image analysis, and natural language processing tasks.
Background and Theory
Convolutional Layers
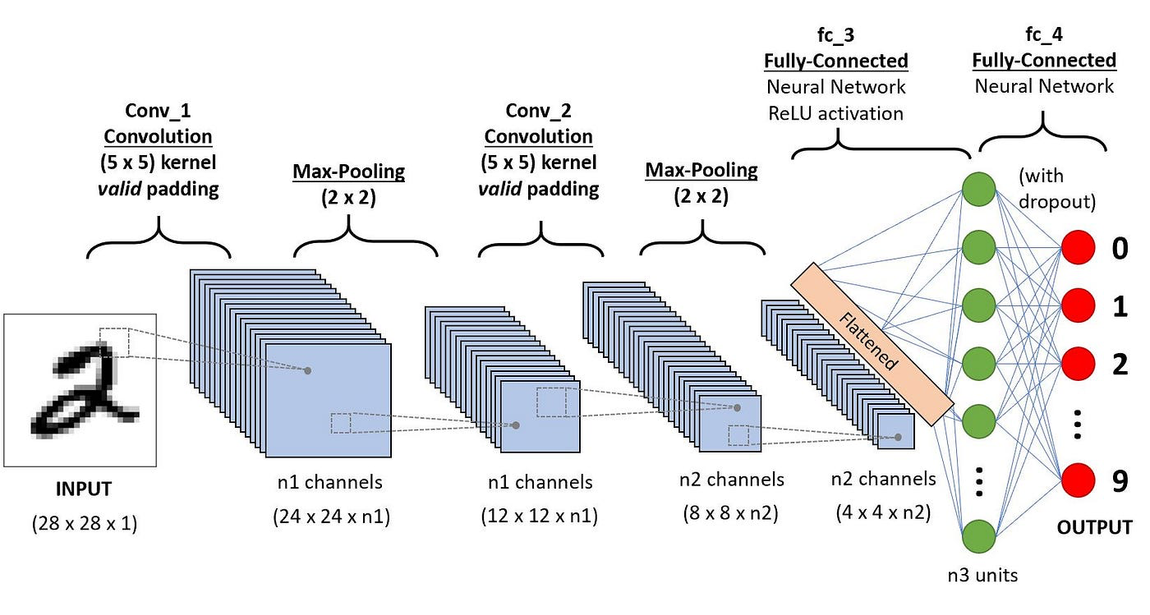
The core building block of a CNN is the convolutional layer that applies a convolution operation to the input passing the result to the next layer. Mathematically, a convolution is a combined integration of two functions and expresses how the shape of one is modified by the other. In the context of a CNN, it's used to blend the input image with a filter (or kernel) to extract features such as edges:
Here, is the input image and is the kernel. The output is known as the feature map.
Activation Functions
Following convolution, an activation function like ReLU (Rectified Linear Unit) is applied to introduce non-linearity into the model, allowing it to learn more complex patterns. ReLU is defined as:
Pooling Layers
Pooling (or subsampling or downsampling) reduces the dimensionality of each feature map but retains the most important information. Max pooling, for example, outputs the maximum value of the portion of the image covered by the kernel, a simple way to down-sample the input:
where is the window and are the elements of the input feature map within that window.
Fully Connected Layers
Finally, CNNs end with fully connected layers where neurons have full connections to all activations in the previous layer, as seen in regular Neural Networks. Their outputs are computed via matrix multiplication with the input and a bias offset:
Backpropagation and Training
Forward Pass
In the forward pass, each convolutional, activation, and pooling layer processes the input and passes it to the next layer. The final output is obtained after the fully connected layer.
Backpropagation
During backpropagation, the network adjusts its parameters proportionally to the error in its predictions. The process involves:
-
Loss Function Calculation: Compute the loss, which measures the prediction error. Common loss functions include mean squared error for regression tasks and cross-entropy loss for classification tasks.
-
Gradient Calculation: Use the chain rule to recursively calculate the derivatives of the loss function with respect to each weight in the network, moving backward from the output layer to the input layer.
- For weight in layer , the gradient is:
- Where is the loss, and is the output of layer .
- For weight in layer , the gradient is:
-
Parameter Update: Update the weights using a learning rate . A typical update rule is:
-
Iteration: Repeat the forward and backward pass for each batch of training data until the network performs satisfactorily.
Implementation
Structure
ConvBlock2D -> Flatten -> DenseBlock -> Dense
Parameters
in_channels_list:list[int]int
List of input channels for convolutional blocks
in_features_list:list[int]int
List of input features for dense blocks
out_channels:int
Output channels for the last convolutional layer
out_features:int
Output features for the last dense layer
filter_size:int
Size of filters for convolution layers
activation:Activation
Type of activation function
optimizer:Optimizer
Type of optimizer for weight update
loss:Loss
Type of loss function
initializer:InitStr, default = None
Type of weight initializer (None for dense layers)
padding:Literal['same', 'valid'], default = ‘same’
Padding strategy (default ‘same’)
stride:int, default = 1
Step size of filters during convolution
do_batch_norm:bool, default = True
Whether to perform batch normalization (default True)
momentum:float, default = 0.9
Momentum for batch normalization
do_pooling:bool, default = True
Whether to perform pooling
pool_filter_size:int, default = 2
Size of filters for pooling layers
pool_stride:int, default = 2
Step size of filters during pooling
pool_mode:Literal['max', 'avg'], default = ‘max’
Pooling strategy (default ‘max’)
do_dropout:bool, default = True
Whether to perform dropout
dropout_rate:float, default = 0.5
Dropout rate
batch_size:int, default = 100
Size of a single mini-batch
n_epochs:int, default = 100
Number of epochs for training
learning_rate:float, default = 0.001
Step size during optimization process
valid_size:float, default = 0.1
Fractional size of validation set
lambda_:float, default = 0.0
L2 regularization strength
early_stopping:bool, default = False
Whether to early-stop the training when the valid score stagnates
patience:int, default = 10
Number of epochs to wait until early-stopping
shuffle:bool, default = True
Whethter to shuffle the data at the beginning of every epoch
Applications
CNNs are applied in numerous domains including:
- Image and Video Recognition: Automated driving, medical imaging.
- Natural Language Processing: Sentence classification, machine translation.
- Recommendation Systems: Personalizing content based on user behavior and preferences.
Discussion on Strengths and Limitations
Strengths
- Feature Learning: CNNs automatically detect the important features without any human supervision.
- Translation Invariance: Once trained, CNNs can recognize objects in an image, regardless of where they appear.
Limitations
- High Computational Cost: Training can be computationally intensive due to the complex architectures.
- Prone to Overfitting: Especially when training data is limited.
Advanced Topics
- Deep Residual Networks: Introduce a shortcut connection that skips one or more layers.
- Dilated Convolutions: Allows the network to have a wider field of view.
References
- LeCun, Yann, et al. "Gradient-based learning applied to document recognition." Proceedings of the IEEE, 86.11 (1998): 2278-2324.
- Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton. "ImageNet classification with deep convolutional neural networks." NIPS. 2012.
- Goodfellow, Ian, Yoshua Bengio, and Aaron Courville. "Deep Learning." MIT Press, 2016. link